Vous aimerez peut-être aussi
- El Corazon Delator-Allan Poe EdgarDocument7 pagesEl Corazon Delator-Allan Poe EdgarCelia EscalonaPas encore d'évaluation
- Pronunciacion ELEDocument18 pagesPronunciacion ELEOscar ArevaloPas encore d'évaluation
- 18 - 10 Analisis Literario. Primer PlanoDocument3 pages18 - 10 Analisis Literario. Primer PlanoJairo Luis Arboleda Marsiglia100% (1)
- PLAN DE CONTINGENCIA TRANSLAGO 2022 CisternasDocument26 pagesPLAN DE CONTINGENCIA TRANSLAGO 2022 CisternasGuillermo AcostaPas encore d'évaluation
- Entrevista y Prueba Psicotecnica Sura-Copy (2) - Copy-Copy (1) - Copy-Copy-Copy-Copy-Copy-Copy (7) - Copy-1Document5 pagesEntrevista y Prueba Psicotecnica Sura-Copy (2) - Copy-Copy (1) - Copy-Copy-Copy-Copy-Copy-Copy (7) - Copy-1Vienna Michelle Álvarez OsorioPas encore d'évaluation
- Generalidades de Los LíquidosDocument3 pagesGeneralidades de Los LíquidosMaria Jose Rodriguez GaonaPas encore d'évaluation
- Guía Alimentaria para Población Guatemalteca Menor de 2 AñosDocument19 pagesGuía Alimentaria para Población Guatemalteca Menor de 2 AñosRodriguez CarlosPas encore d'évaluation
- Ejercicios WordDocument2 pagesEjercicios WordJuan Miranda RamosPas encore d'évaluation
- 5 Practica Nro.5 Movimiento Rotacional Uniforme MirandaLomarJesusAndersonDocument7 pages5 Practica Nro.5 Movimiento Rotacional Uniforme MirandaLomarJesusAndersonAnderson MirandaPas encore d'évaluation
- Banco de Preguntas PDFDocument33 pagesBanco de Preguntas PDFOvidio MiniPas encore d'évaluation
- 1 Componentes Del Paradigma de La SimplicidadDocument3 pages1 Componentes Del Paradigma de La SimplicidadTorres Ed67% (3)
- Examen Contabilidad Financiera Unid 3Document7 pagesExamen Contabilidad Financiera Unid 3julian5ruiz-10Pas encore d'évaluation
- Tarea CJDocument22 pagesTarea CJJose BarajasPas encore d'évaluation
- Mi Lista de PeliculasDocument1 607 pagesMi Lista de PeliculasMarcus SoloPas encore d'évaluation
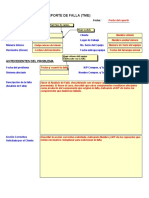
- Reporte de Falla - GarantiaDocument5 pagesReporte de Falla - GarantiaWladimir Franz Rodríguez SaloméPas encore d'évaluation
- Ensayo Ciudadania PlanetariaDocument4 pagesEnsayo Ciudadania PlanetariaJessy AldásPas encore d'évaluation
- Boletín 003Document6 pagesBoletín 003Sandry Ortega SuarezPas encore d'évaluation
- La Danza en InicialDocument13 pagesLa Danza en InicialRosita Natalia Farfan VasquezPas encore d'évaluation
- Neurología Tema 1Document2 pagesNeurología Tema 1Yosting RojasPas encore d'évaluation
- Guía Fisica 2do - Caida LibreDocument2 pagesGuía Fisica 2do - Caida LibreHéctor FuentesPas encore d'évaluation
- Workshop QuibblerDocument13 pagesWorkshop QuibblerAlexa RodriguezPas encore d'évaluation
- Práctico5.Derivacion NumericaDocument3 pagesPráctico5.Derivacion NumericaMaria Teresa GarzonPas encore d'évaluation
- Rotafolio - Eglimar ToroDocument16 pagesRotafolio - Eglimar Toroeglimar toroPas encore d'évaluation
- Formalización de Empresas - Jose AntonDocument17 pagesFormalización de Empresas - Jose AntonarturoPas encore d'évaluation
- Generos Discurcivos 1Document2 pagesGeneros Discurcivos 1Tachi HaMPas encore d'évaluation
- MAUIDocument27 pagesMAUIMarguii Piicon PerdomoPas encore d'évaluation
- Cuestionario de TermorregulaciónDocument3 pagesCuestionario de Termorregulacióndsanis sanchezPas encore d'évaluation
- Platos Tipicos Del PeruDocument3 pagesPlatos Tipicos Del PeruKerhycs Roman100% (1)
- Servicios Regulares de Transporte MaritimoDocument49 pagesServicios Regulares de Transporte Maritimoandres5588Pas encore d'évaluation
- Feriados 2021Document3 pagesFeriados 2021Cadena 3 ArgentinaPas encore d'évaluation