Vous aimerez peut-être aussi
- RoboticsDocument39 pagesRoboticsEysi WidePas encore d'évaluation
- RoboticsDocument42 pagesRoboticsMarini Pramod KumarPas encore d'évaluation
- Robotics 1Document14 pagesRobotics 1Riz WanPas encore d'évaluation
- Snake Robotics: by Rohit Raichura SowmyaDocument22 pagesSnake Robotics: by Rohit Raichura SowmyaRohit RaichuraPas encore d'évaluation
- Liu 2021Document27 pagesLiu 2021Safalsha BabuPas encore d'évaluation
- Introduction To RoboticsDocument27 pagesIntroduction To Roboticsmech roboPas encore d'évaluation
- (IJET-V1I1P1) Author :husssain Babu, Mohammad AliDocument5 pages(IJET-V1I1P1) Author :husssain Babu, Mohammad AliInternational Journal of Engineering and TechniquesPas encore d'évaluation
- 2004-Camarillo-Krummel-Salisbury-Robotic Technology in Surgery Am J SurgeryDocument43 pages2004-Camarillo-Krummel-Salisbury-Robotic Technology in Surgery Am J SurgeryMosix ChPas encore d'évaluation
- Modular Snake Robot With Mapping and Navigation: Urban Search and Rescue (USAR) RobotDocument6 pagesModular Snake Robot With Mapping and Navigation: Urban Search and Rescue (USAR) RobotHaris ZahidPas encore d'évaluation
- ROLLNO/REGD NO: A13/10900739 SECTION: H1901 Submitted To: Harjit SirDocument7 pagesROLLNO/REGD NO: A13/10900739 SECTION: H1901 Submitted To: Harjit SirrahulcoolhutPas encore d'évaluation
- Robotics ManualDocument78 pagesRobotics ManualPOOJAN VANANIPas encore d'évaluation
- Robotics: Submitted byDocument9 pagesRobotics: Submitted bytkulthePas encore d'évaluation
- Modelling of Human Leg and Robotic ArmDocument10 pagesModelling of Human Leg and Robotic ArmTarun SharmaPas encore d'évaluation
- Industrial RobotsDocument15 pagesIndustrial RobotsLW LuWee ChongPas encore d'évaluation
- Soft Copy On RoboticsDocument18 pagesSoft Copy On RoboticsRaghavendra RaghavPas encore d'évaluation
- TranningDocument17 pagesTranningHeera PrajapatPas encore d'évaluation
- Lecture Industrial Robots - 2017 - FundamentalDocument53 pagesLecture Industrial Robots - 2017 - FundamentalĐình TrungPas encore d'évaluation
- PPT Snake Robot222Document21 pagesPPT Snake Robot222sabavath MownekaPas encore d'évaluation
- Robotics: Isap Lab 479EC08003Document14 pagesRobotics: Isap Lab 479EC08003Deepak DeepuPas encore d'évaluation
- Robotics and Autonomous Systems KAMIL PDFDocument26 pagesRobotics and Autonomous Systems KAMIL PDFSafalsha BabuPas encore d'évaluation
- Robotics: EtymologyDocument20 pagesRobotics: EtymologygloriafindelinPas encore d'évaluation
- Intro RobDocument16 pagesIntro RobGanesh Babu100% (1)
- Robots (Research Paper)Document22 pagesRobots (Research Paper)Sophia Michelle JadlocPas encore d'évaluation
- Revision 4th UnitDocument80 pagesRevision 4th UnitMICHEL RAJPas encore d'évaluation
- What Is Robotics? The Science and Technology Behind RobotsDocument36 pagesWhat Is Robotics? The Science and Technology Behind RobotsWajdi SadiqPas encore d'évaluation
- Jchps 9 (4) 113 SABTHAGIRI RAJAN 270 2379-2384Document6 pagesJchps 9 (4) 113 SABTHAGIRI RAJAN 270 2379-2384Vinay KelurPas encore d'évaluation
- Khwaja Naved EC-0842231409Document45 pagesKhwaja Naved EC-0842231409Mathiyazhagan KaliyanPas encore d'évaluation
- Actuators: Robotics Is The Branch ofDocument6 pagesActuators: Robotics Is The Branch ofNicoleSantosPas encore d'évaluation
- Mobile Robot GuideDocument7 pagesMobile Robot GuideJulian MendozaPas encore d'évaluation
- An Introduction To Robotics Dr. Bob Williams, Mechanical Engineering, Ohio UniversityDocument25 pagesAn Introduction To Robotics Dr. Bob Williams, Mechanical Engineering, Ohio UniversitySertaç MalkoçPas encore d'évaluation
- Seminar ONDocument12 pagesSeminar ONAtul SainiPas encore d'évaluation
- ASIMO, A Humanoid Robot Manufactured by Honda Robot Is ADocument23 pagesASIMO, A Humanoid Robot Manufactured by Honda Robot Is AANUJPas encore d'évaluation
- Week 1 Robotics Lecture 1Document63 pagesWeek 1 Robotics Lecture 1Charlton S.InaoPas encore d'évaluation
- Humanoid Robots SeminarDocument28 pagesHumanoid Robots SeminarMan HunPas encore d'évaluation
- Technical English Ii: Practical WorkDocument14 pagesTechnical English Ii: Practical WorkMelissa Haydee Acosta ArmoaPas encore d'évaluation
- 3D CAD Design of 3 Arm Articulated RobotDocument49 pages3D CAD Design of 3 Arm Articulated RobotWebsoft Tech-HydPas encore d'évaluation
- Robotics by B.krishna Chaitanya 07R11A0409 Geethanjali College of Engineering and TechnologyDocument36 pagesRobotics by B.krishna Chaitanya 07R11A0409 Geethanjali College of Engineering and Technologyb.krishna chaitanyaPas encore d'évaluation
- Snake Robot: A.Gandhi, D.Praveen Jacob, G. Balaji, J.Balachandar M.Karthik R.NareshDocument3 pagesSnake Robot: A.Gandhi, D.Praveen Jacob, G. Balaji, J.Balachandar M.Karthik R.Nareshअकोल्याच्या आगाऊ पोट्याचा महाराजPas encore d'évaluation
- Module 1 - History of RoboticsDocument37 pagesModule 1 - History of Roboticsmullig86Pas encore d'évaluation
- Research On The Kinematics and Dynamics A 7-DOF Arm Robot: of of HumanoidDocument6 pagesResearch On The Kinematics and Dynamics A 7-DOF Arm Robot: of of Humanoidanon_731929628Pas encore d'évaluation
- Design and Construction of A Robotic Arm For Industrial Automation IJERTV6IS050539Document5 pagesDesign and Construction of A Robotic Arm For Industrial Automation IJERTV6IS050539Narayan ManePas encore d'évaluation
- Unit 8: Robotics: The Origins of RobotsDocument29 pagesUnit 8: Robotics: The Origins of RobotsvinayaPas encore d'évaluation
- Robotics ManualDocument80 pagesRobotics ManualPOOJAN VANANIPas encore d'évaluation
- Intro To RobotDocument43 pagesIntro To RobotHarsha VardhanPas encore d'évaluation
- Human Emotions in Robots Human Emotions in Robots: Presentation by Yash Presentation by YashDocument26 pagesHuman Emotions in Robots Human Emotions in Robots: Presentation by Yash Presentation by YashYash Sharad MandharePas encore d'évaluation
- Mechanical Engineering Computer Integrated Manufacturing Systems Robotics NotesDocument29 pagesMechanical Engineering Computer Integrated Manufacturing Systems Robotics NotesJoyPas encore d'évaluation
- Advances in Robotics Lecture 4Document22 pagesAdvances in Robotics Lecture 4AkashPas encore d'évaluation
- Snake BotsDocument10 pagesSnake Bots20261A3240 MESRAM GIRIDHARPas encore d'évaluation
- CREATIVE TECHNOLOGIES NotesDocument6 pagesCREATIVE TECHNOLOGIES NotessilverPas encore d'évaluation
- Name: P.Jyothi Branch: Bio-Medical Engineering Institute: Govt. Institute of Electronics Subject: RoboticsDocument34 pagesName: P.Jyothi Branch: Bio-Medical Engineering Institute: Govt. Institute of Electronics Subject: RoboticsananthPas encore d'évaluation
- Fasteners Automation in Aerospace IndustryDocument14 pagesFasteners Automation in Aerospace Industryudaykumar8995Pas encore d'évaluation
- 7-DOF Robotic Arm Design for Mobile Humanoid Robot YirenDocument5 pages7-DOF Robotic Arm Design for Mobile Humanoid Robot YirenAmit SinghPas encore d'évaluation
- Chpter 1Document13 pagesChpter 1yusuf yuyuPas encore d'évaluation
- Unit 4: Introduction To Robot Fundamentals: MEL459: Mechatronics & RoboticsDocument70 pagesUnit 4: Introduction To Robot Fundamentals: MEL459: Mechatronics & RoboticsKashish VermaPas encore d'évaluation
- Robotics 10 DLLDocument7 pagesRobotics 10 DLLshover solisPas encore d'évaluation
- Snake RobotDocument9 pagesSnake RobotginupaulPas encore d'évaluation
- Walker MechanismDocument4 pagesWalker MechanismRAJAPas encore d'évaluation
- Robotics PPT ch-1Document29 pagesRobotics PPT ch-1SileshPas encore d'évaluation
- Robots Artificial Intelligence NanotechnologyDocument2 pagesRobots Artificial Intelligence NanotechnologyMicrovoltz Engineering servicesPas encore d'évaluation
- ISB, IsBe Engine Troubleshooting and Repair Manual 3.9, QSB4.5QSB5.9, QSB6.7, IsC, QSC8.3, IsL, IsLe 9 and QSL9, CM850 Volume 3Document1 048 pagesISB, IsBe Engine Troubleshooting and Repair Manual 3.9, QSB4.5QSB5.9, QSB6.7, IsC, QSC8.3, IsL, IsLe 9 and QSL9, CM850 Volume 3AliceAlormenu88% (16)
- Gauss's LawDocument10 pagesGauss's LawAliceAlormenuPas encore d'évaluation
- Quantum SuperpositionDocument14 pagesQuantum SuperpositionAliceAlormenuPas encore d'évaluation
- Quantum EntanglementDocument30 pagesQuantum EntanglementAliceAlormenuPas encore d'évaluation
- Inverse Laplace TransformDocument2 pagesInverse Laplace TransformAliceAlormenuPas encore d'évaluation
- VolgogradDocument11 pagesVolgogradAliceAlormenuPas encore d'évaluation
- Swedish National Defence Research InstituteDocument3 pagesSwedish National Defence Research InstituteAliceAlormenuPas encore d'évaluation
- Quantum Information ScienceDocument2 pagesQuantum Information ScienceAliceAlormenuPas encore d'évaluation
- EPR ParadoxDocument11 pagesEPR ParadoxAliceAlormenuPas encore d'évaluation
- Shape Functions PDFDocument12 pagesShape Functions PDFKierraPas encore d'évaluation
- Singularity (Mathematics)Document4 pagesSingularity (Mathematics)AliceAlormenuPas encore d'évaluation
- Laplace TransformDocument15 pagesLaplace TransformAliceAlormenuPas encore d'évaluation
- Human VoiceDocument8 pagesHuman VoiceAliceAlormenuPas encore d'évaluation
- Karl Johan ÅströmDocument2 pagesKarl Johan ÅströmAliceAlormenuPas encore d'évaluation
- TF5800PVRDocument2 pagesTF5800PVRAliceAlormenuPas encore d'évaluation
- Structural Health MonitoringDocument10 pagesStructural Health MonitoringAliceAlormenuPas encore d'évaluation
- Variable Structure SystemDocument2 pagesVariable Structure SystemAliceAlormenuPas encore d'évaluation
- Deformation MonitoringDocument4 pagesDeformation MonitoringAliceAlormenuPas encore d'évaluation
- PID ControllerDocument24 pagesPID ControllerAliceAlormenuPas encore d'évaluation
- Control EngineeringDocument5 pagesControl EngineeringAliceAlormenuPas encore d'évaluation
- OscillationDocument6 pagesOscillationAliceAlormenuPas encore d'évaluation
- Fastener Handouts (Screw)Document34 pagesFastener Handouts (Screw)cluchavezPas encore d'évaluation
- Ewe LanguageDocument5 pagesEwe LanguageAliceAlormenuPas encore d'évaluation
- Drill StringDocument5 pagesDrill StringAliceAlormenuPas encore d'évaluation
- Cap 14Document0 pageCap 14Juan CarvajalPas encore d'évaluation
- Orbital ManeuverDocument6 pagesOrbital ManeuverAliceAlormenuPas encore d'évaluation
- Richard Roberts (Engineer)Document3 pagesRichard Roberts (Engineer)AliceAlormenuPas encore d'évaluation
- Worked Example.: Velocity and Acceleration (Including Coriolis Component) in MechanismsDocument4 pagesWorked Example.: Velocity and Acceleration (Including Coriolis Component) in MechanismsAliceAlormenuPas encore d'évaluation
- Spacecraft PropulsionDocument18 pagesSpacecraft PropulsionAliceAlormenuPas encore d'évaluation
- Hohmann Transfer OrbitDocument7 pagesHohmann Transfer OrbitAliceAlormenuPas encore d'évaluation
- MLP Algorithm Overview: Feedforward Neural NetworkDocument3 pagesMLP Algorithm Overview: Feedforward Neural NetworkHari hara Sudhan .MPas encore d'évaluation
- 2013litho SummaryDocument6 pages2013litho SummaryAman kumarPas encore d'évaluation
- PWC Global Fintech Report 2017Document20 pagesPWC Global Fintech Report 2017CrowdfundInsider100% (4)
- 基于多尺度特征递归卷积的稠密点云重建网络 王江安Document9 pages基于多尺度特征递归卷积的稠密点云重建网络 王江安wenjing bianPas encore d'évaluation
- What is Artificial IntelligenceDocument6 pagesWhat is Artificial IntelligenceProfessoR DonaPas encore d'évaluation
- AIML - 04 Single Layer PerceptronDocument11 pagesAIML - 04 Single Layer PerceptronUMANG PEDNEKARPas encore d'évaluation
- Vision System Course Outcomes and ApplicationsDocument2 pagesVision System Course Outcomes and ApplicationsRANJITHAPas encore d'évaluation
- Real-Time Convolutional Neural Networks For Emotion and Gender ClassificationDocument5 pagesReal-Time Convolutional Neural Networks For Emotion and Gender ClassificationDivyank PandeyPas encore d'évaluation
- Polymer Pen LithographyDocument15 pagesPolymer Pen LithographyeisaPas encore d'évaluation
- Emerging Technologies and Their Impact on SocietyDocument8 pagesEmerging Technologies and Their Impact on SocietySonia SharmaPas encore d'évaluation
- 6 05 Undercomplete Vs Overcomplete Hidden LayerDocument4 pages6 05 Undercomplete Vs Overcomplete Hidden LayerNiraj ReginaldPas encore d'évaluation
- Artificial Intelligence in Robotics Applications: Powerpoint Templates Powerpoint TemplatesDocument25 pagesArtificial Intelligence in Robotics Applications: Powerpoint Templates Powerpoint TemplatesPraveen ReddyPas encore d'évaluation
- University Institute of TechnologyDocument9 pagesUniversity Institute of Technologyrahul kumarPas encore d'évaluation
- Humanoid Robots - Sooner Than You Might ThinkDocument7 pagesHumanoid Robots - Sooner Than You Might ThinkShahnaz Seyid-zadaPas encore d'évaluation
- Effective Handwritten Digit Recognition using Deep Convolution Neural NetworkDocument5 pagesEffective Handwritten Digit Recognition using Deep Convolution Neural NetworkRavi ShankarPas encore d'évaluation
- Artificial Intelligence BasicsDocument2 pagesArtificial Intelligence BasicsDennis DubePas encore d'évaluation
- A Survey On Practical Applications of Small Robots As Social RobotsDocument2 pagesA Survey On Practical Applications of Small Robots As Social RobotsAdamei AdamPas encore d'évaluation
- SLIP: Self-Supervision Meets Language-Image Pre-TrainingDocument13 pagesSLIP: Self-Supervision Meets Language-Image Pre-Trainingshruthi h pPas encore d'évaluation
- Nanotechnology Question Bank Covers Key Concepts Like Nanoscience, Materials, FabricationDocument7 pagesNanotechnology Question Bank Covers Key Concepts Like Nanoscience, Materials, FabricationbaranirajPas encore d'évaluation
- Distant Traffic Light Recognition Using Semantic SegmentationDocument7 pagesDistant Traffic Light Recognition Using Semantic Segmentationz feieeePas encore d'évaluation
- RobotsDocument8 pagesRobotsapi-255961304Pas encore d'évaluation
- Template Artikel Riset Untuk MK SeminarDocument3 pagesTemplate Artikel Riset Untuk MK SeminarDaraaNorishaPas encore d'évaluation
- Classification of Puck Possession Events in Ice HockeyDocument8 pagesClassification of Puck Possession Events in Ice HockeyjeffconnorsPas encore d'évaluation
- Alexnet: The Architecture That Challenged CnnsDocument6 pagesAlexnet: The Architecture That Challenged CnnspavithraPas encore d'évaluation
- Best Practice Book For IELTS WritingDocument51 pagesBest Practice Book For IELTS WritingHabimana AndrewPas encore d'évaluation
- Performance Analysis of NASNet OnDocument26 pagesPerformance Analysis of NASNet OnMistlemagicPas encore d'évaluation
- 筆記1Document2 pages筆記1盧旻瑋Pas encore d'évaluation
- Pantech-Deep Learning, AI Topics 2022-2023Document5 pagesPantech-Deep Learning, AI Topics 2022-202320261A3232 LAKKIREDDY RUTHWIK REDDYPas encore d'évaluation
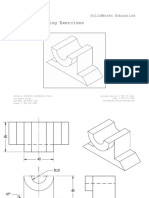
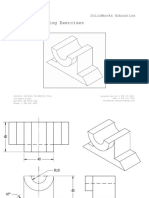
- Detailed Drawing Exercises: Solidworks EducationDocument51 pagesDetailed Drawing Exercises: Solidworks EducationlutherblackPas encore d'évaluation
- Computer Vision Ii: Ai Courses by OpencvDocument8 pagesComputer Vision Ii: Ai Courses by OpencvAmanda GarciaPas encore d'évaluation