Vous aimerez peut-être aussi
- Physics 103 - Discussion Notes #3: Spherical CoordinatesDocument5 pagesPhysics 103 - Discussion Notes #3: Spherical CoordinatesDebajyoti DattaPas encore d'évaluation
- GLDocument144 pagesGLDebajyoti DattaPas encore d'évaluation
- First Midterm ExamDocument10 pagesFirst Midterm ExamDebajyoti DattaPas encore d'évaluation
- Noise PDFDocument3 pagesNoise PDFDebajyoti DattaPas encore d'évaluation
- Winner-Ii 2007Document82 pagesWinner-Ii 2007조창혁Pas encore d'évaluation
- Marks of ESE-2018Document58 pagesMarks of ESE-2018Debajyoti DattaPas encore d'évaluation
- Department of Electrical Engineering and Computer Sciences University of California, Berkeley EE 121: Introduction To Digital Communications S 2016Document2 pagesDepartment of Electrical Engineering and Computer Sciences University of California, Berkeley EE 121: Introduction To Digital Communications S 2016Debajyoti DattaPas encore d'évaluation
- Internet of Things - WikipediaDocument208 pagesInternet of Things - WikipediaDebajyoti DattaPas encore d'évaluation
- Statistical Digital Signal Processing and Modeling: Monson H. HayesDocument6 pagesStatistical Digital Signal Processing and Modeling: Monson H. HayesDebajyoti DattaPas encore d'évaluation
- Final: Total 200 Points, Duration: 12:15pm-3:15pm: EE 359 - Wireless Communications - Autumn 2016Document3 pagesFinal: Total 200 Points, Duration: 12:15pm-3:15pm: EE 359 - Wireless Communications - Autumn 2016Debajyoti DattaPas encore d'évaluation
- Mitra-Ch9 3ed PDFDocument7 pagesMitra-Ch9 3ed PDFDebajyoti DattaPas encore d'évaluation
- Notes PDFDocument157 pagesNotes PDFDebajyoti DattaPas encore d'évaluation
- Microprocessors NPTELDocument400 pagesMicroprocessors NPTELDebajyoti DattaPas encore d'évaluation
- RoheDocument2 pagesRoheDebajyoti DattaPas encore d'évaluation
- TYC 07 Synchronous Machines: Special NoteDocument6 pagesTYC 07 Synchronous Machines: Special NoteDebajyoti DattaPas encore d'évaluation
- N5650 1Document14 pagesN5650 1Debajyoti DattaPas encore d'évaluation
- Electric Machines NPTELDocument382 pagesElectric Machines NPTELDebajyoti DattaPas encore d'évaluation
- p247 PenneyDocument2 pagesp247 PenneyDebajyoti DattaPas encore d'évaluation
- Electrical Machinery CH 1&2 P.S. BimbhraDocument238 pagesElectrical Machinery CH 1&2 P.S. BimbhraDebajyoti Datta91% (11)
- Introduction To Complex Binary Number SystemsDocument4 pagesIntroduction To Complex Binary Number SystemsDebajyoti DattaPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 7.2 Single-Phase Diode RectifiersDocument32 pages7.2 Single-Phase Diode RectifiersTrương Anh DuyPas encore d'évaluation
- Instruction Leaflet For Modbus Power Monitoring/ Metering Module (PM3) For FD, JG, and KD/LG Circuit Breakers and Motor Circuit ProtectorsDocument20 pagesInstruction Leaflet For Modbus Power Monitoring/ Metering Module (PM3) For FD, JG, and KD/LG Circuit Breakers and Motor Circuit ProtectorsMichael BesaPas encore d'évaluation
- Creat The Browser Program Using Visual Basic 6.0Document4 pagesCreat The Browser Program Using Visual Basic 6.0suv_fame100% (8)
- Part 4-VDR WebinterfaceDocument59 pagesPart 4-VDR Webinterfaceartur.damascenoPas encore d'évaluation
- Programming inDocument72 pagesProgramming inAKSHAYA COMPUTERS VEDASANDURPas encore d'évaluation
- Mosfets As Current Sources: Analog ElectronicsDocument22 pagesMosfets As Current Sources: Analog ElectronicsPARTH RAMANUJPas encore d'évaluation
- Motor Management System: Grid SolutionsDocument110 pagesMotor Management System: Grid Solutionsivan lopezPas encore d'évaluation
- Microprocessor Manual NewDocument26 pagesMicroprocessor Manual NewVirendra KumarPas encore d'évaluation
- Term Paper On CybercrimeDocument16 pagesTerm Paper On CybercrimeML GamingPas encore d'évaluation
- Requirement AnalysisDocument9 pagesRequirement Analysisgunda_venu9856Pas encore d'évaluation
- RACI MatrixDocument3 pagesRACI MatrixJoydip MukhopadhyayPas encore d'évaluation
- HUAWEI SVN5800 Secure Access Gateway BrochureDocument2 pagesHUAWEI SVN5800 Secure Access Gateway BrochuremmontieluPas encore d'évaluation
- Robotics Real-Time ProgrammingDocument112 pagesRobotics Real-Time ProgrammingNazar KurylkoPas encore d'évaluation
- Software Requirements Specification: Version 1.0 ApprovedDocument14 pagesSoftware Requirements Specification: Version 1.0 ApprovedRAMINEDI SANTHOSH 20BCE1477Pas encore d'évaluation
- Synchronous Digital Hierarchy (SDH)Document5 pagesSynchronous Digital Hierarchy (SDH)eldazenelajPas encore d'évaluation
- Epo 510 RG Log Files 0-00 En-UsDocument10 pagesEpo 510 RG Log Files 0-00 En-UsabbuasherPas encore d'évaluation
- Reflection ApiDocument14 pagesReflection ApiAbrar FaiyazPas encore d'évaluation
- BB5Box User Manual v4Document7 pagesBB5Box User Manual v4Zoltan LobodaPas encore d'évaluation
- 3 Kaby Lake Overclocking ChartDocument10 pages3 Kaby Lake Overclocking ChartБорис ВолодинPas encore d'évaluation
- Compiler Design Concepts, Worked Out Examples and Mcqs For Net/SetDocument101 pagesCompiler Design Concepts, Worked Out Examples and Mcqs For Net/SetRobelPas encore d'évaluation
- Bhavesh Chandraprakash 14487494 202201200840 ResumeDocument3 pagesBhavesh Chandraprakash 14487494 202201200840 ResumeGaurav AgrawalPas encore d'évaluation
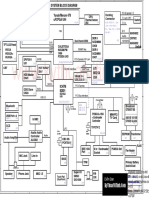
- Aspire 5670 (Quanta ZB1) SchematicsDocument50 pagesAspire 5670 (Quanta ZB1) SchematicsjeanpellPas encore d'évaluation
- Project Report Speed Control of Induction MotorDocument47 pagesProject Report Speed Control of Induction MotorSanjivee SachinPas encore d'évaluation
- Global Cache: Installation and Operations GuideDocument27 pagesGlobal Cache: Installation and Operations GuideNakendra DhamiPas encore d'évaluation
- 8051 MicrocontrollerDocument40 pages8051 MicrocontrollerHiru Purushothaman Hirudayanathan100% (1)
- Format String VulnerabilityDocument28 pagesFormat String VulnerabilityArunSharmaPas encore d'évaluation
- Harmonic Ellipse3000Document4 pagesHarmonic Ellipse3000picatchoof1Pas encore d'évaluation
- Integration InterfacesDocument170 pagesIntegration Interfacesjlopez_303Pas encore d'évaluation
- Pic18f45k80 PDFDocument628 pagesPic18f45k80 PDFArijit Roy ChowdhuryPas encore d'évaluation
- Ipf Troubleshooting GuideDocument173 pagesIpf Troubleshooting GuideSpy Ball100% (2)