Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Waterproofing: Sikafuko® Injection Hose SystemsDocument8 pagesWaterproofing: Sikafuko® Injection Hose SystemspouyaPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Catt Registration Form: Municipal MembershipDocument1 pageCatt Registration Form: Municipal MembershippouyaPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- 571 Bfe 5 Ad 557 FD 1 Da 3 Aa 81 C 48Document16 pages571 Bfe 5 Ad 557 FD 1 Da 3 Aa 81 C 48pouyaPas encore d'évaluation
- 1985 - Trautmann - Lateral Force-Displacement Response of Buried PipeDocument16 pages1985 - Trautmann - Lateral Force-Displacement Response of Buried PipepouyaPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- 2000 - Penzien - Seismically Induced Racking of Tunnel LiningsDocument9 pages2000 - Penzien - Seismically Induced Racking of Tunnel Liningspouya100% (1)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- OPSS 1854 Apr18 NOTICE TO USERSDocument1 pageOPSS 1854 Apr18 NOTICE TO USERSpouyaPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Anchorless Circular Formwork With GRV Articulated WalersDocument32 pagesAnchorless Circular Formwork With GRV Articulated WalerspouyaPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- 1998 - Koh - Fluid Structure Interaction Analysis of 3D Rectangular Tank by BE FEDocument16 pages1998 - Koh - Fluid Structure Interaction Analysis of 3D Rectangular Tank by BE FEpouyaPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Maximo: Panel Formwork With Single-Sided MX Tie TechnologyDocument44 pagesMaximo: Panel Formwork With Single-Sided MX Tie TechnologypouyaPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- 2005 - Javier Avilés - Influence of Foundation Flexibility On RM and CM FactorsDocument10 pages2005 - Javier Avilés - Influence of Foundation Flexibility On RM and CM FactorspouyaPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- 2016 - Nayak - Nonlinear Seismic Response of A Partially Filled Rectangular Liquid Tank With A Submerged BlockDocument26 pages2016 - Nayak - Nonlinear Seismic Response of A Partially Filled Rectangular Liquid Tank With A Submerged BlockpouyaPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- 1995 - Stamos - Dynamic Analysis of Large 3-D Underground Structures by The BEMDocument18 pages1995 - Stamos - Dynamic Analysis of Large 3-D Underground Structures by The BEMpouyaPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- 2002 - Ghiocel - Stochastic Finite-Element Analysis of Seismic Soil-Structure InteractionDocument12 pages2002 - Ghiocel - Stochastic Finite-Element Analysis of Seismic Soil-Structure InteractionpouyaPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- 2013 - Vladimir Vukobratović - A Simplified Seismic Analysis of Circular Liquid Storage TanksDocument6 pages2013 - Vladimir Vukobratović - A Simplified Seismic Analysis of Circular Liquid Storage TankspouyaPas encore d'évaluation
- GT 24 Formwork Girder: The Versatile Lattice Girder With A High Load-Bearing CapacityDocument20 pagesGT 24 Formwork Girder: The Versatile Lattice Girder With A High Load-Bearing CapacitypouyaPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Hilti Technical BulletinDocument9 pagesHilti Technical BulletinpouyaPas encore d'évaluation
- SB Brace Frame: Reliable Load Transfer For Single-Sided Forming Operations Up To 8.75 M HighDocument48 pagesSB Brace Frame: Reliable Load Transfer For Single-Sided Forming Operations Up To 8.75 M HighpouyaPas encore d'évaluation
- Use of Controlled Low-Strength Material (CLSM) As Controlled FillDocument2 pagesUse of Controlled Low-Strength Material (CLSM) As Controlled FillpouyaPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Tee84 54 Rev2Document1 pageTee84 54 Rev2pouyaPas encore d'évaluation
- Sika® Latex R: Acrylic Latex, Bonding Agent and Admixture For Cement Mortar and ConcreteDocument2 pagesSika® Latex R: Acrylic Latex, Bonding Agent and Admixture For Cement Mortar and ConcretepouyaPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Developed by Ce.A.S. SRL, Italy and Deep Excavation LLC, U.S.ADocument19 pagesDeveloped by Ce.A.S. SRL, Italy and Deep Excavation LLC, U.S.ApouyaPas encore d'évaluation
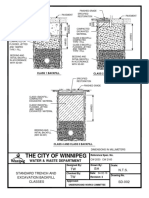
- The City of Winnipeg: Water & Waste DepartmentDocument1 pageThe City of Winnipeg: Water & Waste DepartmentpouyaPas encore d'évaluation
- Commento-Risultati-Calcolo Rev01 EngDocument9 pagesCommento-Risultati-Calcolo Rev01 EngpouyaPas encore d'évaluation
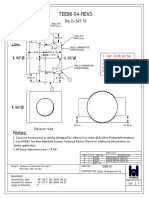
- Tee96 54 Rev3Document1 pageTee96 54 Rev3pouyaPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Seismic SurveyDocument18 pagesSeismic SurveyAisyah Taufik100% (3)
- Some Natural Phenomena QDocument10 pagesSome Natural Phenomena QVIII RAMAN MOOD TANUJ TAKURPas encore d'évaluation
- The Geomorphic ProcessDocument10 pagesThe Geomorphic Processrosana f.rodriguezPas encore d'évaluation
- Earthquakes 1 Recording SEDocument4 pagesEarthquakes 1 Recording SECarlos Alfaro100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- 2nd Quarter Test in Science 8Document5 pages2nd Quarter Test in Science 8Maitem Stephanie GalosPas encore d'évaluation
- 08.earthquakes and Earths InteriorDocument45 pages08.earthquakes and Earths InteriorChristine ValerioPas encore d'évaluation
- Earthquake: PhilippinesDocument41 pagesEarthquake: PhilippinesDaniella Pasilbas SabacPas encore d'évaluation
- Earthquakes: The Material For The Next Two Lectures Is Based On Chapter 8 (Pgs 251-316)Document65 pagesEarthquakes: The Material For The Next Two Lectures Is Based On Chapter 8 (Pgs 251-316)Najeebullah KardaarPas encore d'évaluation
- LAS Week 4 5 AnswerSheetsDocument4 pagesLAS Week 4 5 AnswerSheetsLyanna Nina CabralPas encore d'évaluation
- A Tragedy To Life and PropertyDocument40 pagesA Tragedy To Life and PropertyJocelyn Amen SumalpongPas encore d'évaluation
- General Wave Properties 1 QP PDFDocument13 pagesGeneral Wave Properties 1 QP PDFIzzati ShahabuddinPas encore d'évaluation
- Summative TestDocument2 pagesSummative TestDominador MasiragPas encore d'évaluation
- Science 10 Review For 2nd AssessmentDocument21 pagesScience 10 Review For 2nd AssessmentChloue AbunaPas encore d'évaluation
- Hsslive Plustwo Geography Focus Notes by MgsDocument54 pagesHsslive Plustwo Geography Focus Notes by MgsTiara GeorgePas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- SEISMOLOGYDocument2 pagesSEISMOLOGYpydjianPas encore d'évaluation
- Physical Geology Earth Revealed 9th Edition Carlson Test BankDocument25 pagesPhysical Geology Earth Revealed 9th Edition Carlson Test BankAshleyMaciasowbj100% (35)
- Geopphysical Investigation Techniques For Groundwater ExplorationDocument27 pagesGeopphysical Investigation Techniques For Groundwater ExplorationShubhamPas encore d'évaluation
- Earthquakes and Faults: ScienceDocument34 pagesEarthquakes and Faults: ScienceMary Grace Lemon100% (1)
- Module 4 - Week 4Document20 pagesModule 4 - Week 4Alice ChanPas encore d'évaluation
- Earth SciencesDocument103 pagesEarth SciencesAariqPas encore d'évaluation
- Science 8 - Quarter 2 - Module 2Document17 pagesScience 8 - Quarter 2 - Module 2Jan wysha AlveaPas encore d'évaluation
- Seismic RefractionDocument8 pagesSeismic Refractionrurouni_adhi100% (1)
- A Project Report On EarthquakeDocument43 pagesA Project Report On EarthquakeBiswajit RouthPas encore d'évaluation
- Draft Proof HiDocument34 pagesDraft Proof HiHermann Erick Schwarze FieldhousePas encore d'évaluation
- GenPhys1 12 Q2 Mod3 PeriodicMotion Ver4Document45 pagesGenPhys1 12 Q2 Mod3 PeriodicMotion Ver4Vhea Czaryse Ibañez LokingPas encore d'évaluation
- Seismic MethodsDocument21 pagesSeismic MethodsThrupthi Parvathaneni100% (2)
- S Skill Disaster Management QADocument222 pagesS Skill Disaster Management QASurya100% (4)
- The Science of EarthquakesDocument11 pagesThe Science of EarthquakesRoy Isaac SilladorPas encore d'évaluation
- Dynamic GeologyDocument30 pagesDynamic GeologyAbhinav KalathiparambilPas encore d'évaluation
- Mining Technology Volume 117 Issue 3 2008 (Doi 10.1179 - 037178409x405741) Singh, T. N. Dontha, L. K. Bhardwaj, V. - Study Into BlastDocument6 pagesMining Technology Volume 117 Issue 3 2008 (Doi 10.1179 - 037178409x405741) Singh, T. N. Dontha, L. K. Bhardwaj, V. - Study Into Blastmulya gusmanPas encore d'évaluation
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureD'EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- A Welder’s Handbook to Robotic ProgrammingD'EverandA Welder’s Handbook to Robotic ProgrammingÉvaluation : 5 sur 5 étoiles5/5 (3)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindD'EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindPas encore d'évaluation
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!D'EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Évaluation : 4 sur 5 étoiles4/5 (3)