Académique Documents
Professionnel Documents
Culture Documents
Teoria 18 Filosofia de Controle Vetorial PDF
Transféré par
Navegador9Titre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Teoria 18 Filosofia de Controle Vetorial PDF
Transféré par
Navegador9Droits d'auteur :
Formats disponibles
Teoria 18 Filosofia de Controle Vetorial
18.1 Introdução: Características de Controle da Máquina Assíncronas:
De uma forma geral pode-se dividir a forma de controle do inversor em 2 tipos: escalar e
vetorial.
O controle escalar, como foi visto nos estudos teóricos e práticos anteriores, é aquele que
impõe no motor uma determinada tensão e uma determinada freqüência, visando manter a relação
V/F constante. É também chamado controle em malha aberta. A sua característica principal é que a
precisão da regulação de velocidade para uma dada freqüência de acionamento do motor é função
do escorregamento, o qual por sua vez varia em função da carga. A carga por sua vez, também pode
variar (ou não) em função da velocidade. Em baixas rotações, existe ainda a necessidade do
inversor aumentar a relação V/F para compensar o efeito da queda na resistência estatórica, visando
manter, dentro do possível, a capacidade de torque do motor para baixas rotações.
O controle vetorial (também denominado Controle por Orientação de Campo - FOC) é
um método utilizado no acionamento de velocidade variável de máquinas de indução trifásicas a
fim de controlar o torque (e daí por fim a velocidade) através de uma malha de controle que
monitora a corrente enviada a máquina.
O controle vetorial possibilita atingir um elevado grau de precisão e rapidez no controle
tanto do torque quanto da velocidade do motor. O nome vetorial advém do fato que para ser
possível este controle, é feita uma decomposição vetorial da corrente enviada ao motor nos
vetores que representam o torque e o fluxo no motor, de forma a possibilitar a regulação
independente do torque e do fluxo.
O controle vetorial de máquinas assíncronas pode ainda ser dividido em 2 tipos: normal e
“sensorless” (sem sensores).
Denominamos sensores, dispositivos que, sob o efeito de um sinal físico, alteram suas
propriedades físicas. Neste contexto um encoder ou um resolver já não são mais sensores, mas
dispositivos mais desenvolvidos que usam sensores, onde os sinais dos mesmos já foram
condicionados a fornecer um sinal adequado ao uso desejado.
O controle vetorial normal necessita ter no motor um “sensor de velocidade” (por exemplo,
um encoder incremental). Este tipo de controle permite obter a maior precisão possível no controle
da velocidade e do torque, inclusive com o eixo do motor parado.
A função do encoder é fundamental principalmente em velocidades próximas ao zero e
também, muitas vezes, quando a carga assume valores extremos.
O controle vetorial “sensorless” não necessita de um “sensor de velocidade”, ou seja, não
necessita de um encoder. Sua precisão na regulação de velocidade é inferior se comparado a do
controle vetorial normal, com limitações ainda maiores em baixíssimas rotações (velocidade zero
ou bem próximas a zero).
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 225
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
O objetivo do chamado controle sensorless de máquinas assíncronas de indução é eliminar
o encoder colocado no eixo da máquina, bem como os acessórios a ele ligados, diminuindo-se
custos e eliminando-se etapas adicionais ao controle da mesma.
Entretanto não se conhece, até o momento um controle que seja genuinamente sem sensores
(sensorless). O chamado controle vetorial sem sensores é, na verdade, um controle sem o transdutor
de posição (encoder ou resolver). Uma análise um pouco mais rígida mostra que, mesmo no
clássico controle vetorial de máquinas assíncronas, é necessário pelo menos dois sensores de
corrente para que sejam feitos as transformações de coordenadas e o cálculo do fluxo.
Até o presente momento o controle em velocidades próximas do zero, é explorado em um
numero muito limitado de aplicações. Quando o enfoque é posicionamento, as técnicas
desenvolvidas para emprego das máquinas assíncronas quase sempre exigem alterações estruturais
na própria máquina e ainda assim apresentam performance insatisfatória, por isso normalmente se
utilizam outras máquinas que não a assíncrona, para controle de posição.
O estudo deste capítulo tem por objetivo oferecer a seus usuários os conhecimentos básicos
sobre as diversas tecnologias de Conversores de Freqüência com Controle Vetorial disponíveis
atualmente no mercado, sem desmerecer e nem favorecer a nenhumas delas, pois, a tecnologia
empregada em cada conversor pode ser a mais adequada com a aplicação existente, não
necessitando da melhor tecnologia disponível no mercado.
Cabe ao profissional da área especificar o conversor que melhor lhe atenda a relação de
custo e benefício proporcionado.
18.2 O Controle Vetorial:
O motor de indução possui características de elevada robustez e baixo custo, que o torna
bastante atrativo para aplicações industriais. Por esta razão, a maioria dos motores elétricos
utilizados na indústria é deste tipo. O motor de indução ficou restrito, num primeiro momento, a
aplicações de baixo desempenho dinâmico devido à complexidade de seu controle.
No funcionamento dos Conversores de Freqüência Escalares (V/f) utiliza-se basicamente da
tensão de saída (V) e da freqüência de saída (f) para controle e variação de velocidade.
Apesar de eficiente para um bom número de aplicações, o modo de controle Escalar (V/f)
possui algumas limitações:
• Não possui controle de conjugado;
• Possui baixa performance dinâmica.
• Não usa a orientação do campo magnético;
• Ignora as características técnicas do motor;
Já a máquina CC com excitação independente, possui uma estrutura de controle bastante
simples baseada na ortogonalidade dos eixos associados ao fluxo de campo e a força magnetomotriz
de armadura. Devido às características construtivas, estes eixos, conjugado e fluxo, estão
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 226
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
desacoplados, facilitando projetos de acionamento com alto desempenho dinâmico, através do
controle da corrente de armadura.
Na máquina CA, esta ortogonalidade não existe diretamente tornando as interações
dinâmicas bastante complexas, ou seja, o fluxo e a FMM (Força Magneto Motriz) não são
estacionários e mudam de valor com diferentes velocidades, dependendo assim do estado dinâmico
da máquina.
Podemos afirmar que a máquina de indução é um sistema não linear multi-variável,
diferenciando-se de uma carga R-L passiva pela existente interação entre o estator e o rotor, o
qual resulta em um comportamento que é dependente do ponto de operação (fluxo, conjugado,
velocidade). Podemos dizer que a máquina de indução é uma carga R-L ativa.
Isso se constituiu um grande problema até que Hasse em 1969 propôs uma nova
metodologia baseada em seu modelo vetorial, usando vetores espaciais para a modelagem da
máquina CA. O excelente desempenho dinâmico do motor de corrente contínua de excitação
independente foi o ponto de partida para os métodos vetoriais aplicados aos motores de indução.
Somente em 1972, F. Blaschke, utilizando-se de conceitos matemáticos e de muita intuição
conseguiu formular uma teoria geral sobre o comportamento dinâmico da máquina de indução. Com
a apresentação do princípio de Controle por Orientação de Campo, estava lançada a base teórica
para o desenvolvimento das técnicas de Controle Vetorial de motores CA. A dificuldade então
passou a ser implementá-la, uma vez que a técnica de orientação de campo previa cálculos
complexos como conversão de sistemas de coordenadas móveis, utilizando equações
simplificadas do modelo matemático do motor.
O objetivo da técnica de controle por orientação de campo é produzir um desacoplamento
entre Conjugado e Fluxo de campo, possibilitando controlar a máquina CA de forma semelhante
ao controle de um motor CC. Devido ao grande volume de processamento matemático inerente a
essa técnica, o controle por orientação de campo só pode ser implementado na prática a partir de
1980, tornando-se economicamente viável, somente alguns anos depois, com o aumento da
velocidade, aumento da capacidade de processamento matemático matricial e redução do custo de
fabricação dos microprocessadores.
Atualmente, graças aos progressos obtidos principalmente nas áreas da eletrônica de
potência e da microeletrônica, já é possível a utilização de motores de indução em aplicações de
alto desempenho dinâmico. Os acionamentos industriais de alto desempenho que utilizam motores
de indução empregam o controle vetorial. Este método de controle utiliza correntes para comandar
o sistema e, sendo assim, faz-se necessário adicionar uma malha de realimentação para o controle
da corrente do motor. O controle vetorial de máquinas de indução possui um grande campo de
estudos e pesquisas científico-tecnológicas por tratar-se de sistemas bastante complexos, o qual
exige intensa computação em tempo real e maior velocidade de processamento, quando
comparado ao controle escalar.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 227
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
O controle vetorial ultrapassa as desvantagens mencionadas para o controle escalar (V/f =
constante) e pode assegurar elevados desempenhos dinâmicos e de conversão energética.
Encontramos nas literaturas termos que são correlatos associados a Controle Vetorial: "Field
Oriented Control" (FOC - Controle por Orientação de Campo); "Vector control"; "Universal Field
Oriented" (UFO).
O controle vetorial é um método de controle, com uma visão da máquina e dos seus
modelos dinâmicos, que toma em consideração tanto a amplitude das grandezas como a sua fase,
fazendo utilização de "vetores espaciais", cujas projeções são as variáveis trifásicas.
Id = corrente de excitação
Corrente Iq = corrente de conjugado
de TRANSF
saída
Id Iq
Corrente
Integrador de
Tensão magnetização
de TRANSF
saída Valor estimado
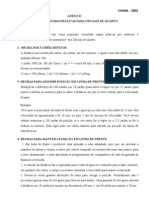
Tradicionalmente o controle vetorial utiliza a estratégia de matrizes de transformação do sistema
de 3 eixos para um sistema de 2 eixos (transformadas de Clark e Park). A estrutura de
regulação (cadeia fechada) recebe assim duas constantes como referência: a componente do
conjugado (sobre o eixo q) e a componente do fluxo (sobre o eixo d).
A técnica de Controle por Orientação de Campo (Field Oriented Control – FOC) tem sido
largamente utilizada para permitir alto desempenho dinâmico de conjugado e velocidade no
acionamento de máquinas de indução. Os regimes dinâmicos mais comuns da máquina são levados
em consideração e o modelo obtido é similar ao das máquinas de C.C. e, portanto, de fácil controle,
atendendo à dependência linear entre conjugado e corrente. O tratamento matricial / vetorial,
recorrendo ao uso de matrizes é facilitado por uso de software. Os modelos tornam-se muito
compactos. A estrutura do comando dos semicondutores de potência é conseguida usando um
modulador de vetores espaciais (Space Vector PWM).
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 228
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
regulador regulador
referência
n I
Valor estimado
Corrente
de regulador
PWM
magnetização
φ
Valor estimado
O controle vetorial influi sobre os controladores de corrente eliminando os termos de
acoplamento da equação do rotor da máquina de indução. Este fato produz a eliminação da parte
complexa dos pólos associados à equação do rotor e com isto são eliminadas também as restrições
nas faixas de variação da velocidade mecânica e freqüência síncrona apresentadas pelo controlador
de corrente sem controle vetorial.
regulador regulador
referência
n I
Corrente
de regulador
magnetização
φ PWM
"Encoder"
Valor real
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 229
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
O desenvolvimento da tecnologia de semicondutores de potência assim, como a aplicação
dos Processadores Digitais de Sinais (DSP), Circuitos integrados para fins específicos (ASIC),
Field Programmable Gate Array (FPGA - componente semicondutor de lógica de uso geral que
pode ser customizado para operar como um chip dedicado a uma tarefa específica), originou várias
mudanças nas orientações das pesquisas em acionamentos de máquinas assim como das aplicações
industriais: o custo do ‘hardware’ necessário para controle vetorial tem diminuído continuamente.
Além disso, dependendo da aplicação, o controle vetorial pode ser simplificado, deixando o custo
da estrutura de hardware ainda menor. Com isto, as complexidades iniciais da bancada experimental
foram deslocadas para a programação em tempo real dos sistemas de controle.
O desenvolvimento das Técnicas de Modulação PWM também foi incentivado pelo
desenvolvimento tecnológico, pois a implementação do Modulador de Vetores Espaciais requeria
uma montagem complexa em bancada experimental e um investimento de tempo bastante elevado
na implementação. Estas limitações foram superadas com os recentes DSPs, com altas freqüências
de operação, alta velocidade de conversão A/D e D/A, alto grau de paralelismo(1) e com periféricos
os quais implementam o modulador PWM em máquinas de estados finitos(2). Atualmente as
aplicações utilizando a modulação de vetores espaciais usam a técnica SV-PWM (Space Vector
PWM) em substituição à técnica PWM que utiliza o método de comparação de rampa convencional.
18.2.1 Técnicas de Controle Vetorial:
Para a implementação de qualquer uma das técnicas de controle vetorial, é necessário que
exista um desacoplamento entre o conjugado e o fluxo da máquina obtido com o alinhamento
da componente ‘d’ do fluxo orientado.
O controle por campo orientado tem como objetivo o desacoplamento de controles de
conjugado e fluxo do motor de indução. Com este desacoplamento, o motor pode ser operado a
fluxo constante de forma análoga ao motor DC com excitação independente. Este desacoplamento é
alcançado referenciando os controles de conjugado e fluxo em um sistema de coordenadas que está
alinhado com o vetor fluxo do motor, conhecido como sistema de coordenadas de campo, e
impondo um escorregamento que cancela o acoplamento existente entre os eixos d e q.
Com isto os modelos matemáticos da máquina de indução, sejam para o fluxo no rotor,
sejam para o fluxo no estator, sejam ainda para o fluxo no entreferro, devem ser modificados
inserindo esta condição.
Assim, obtém-se novas equações para implementação do controlador. Executando o
alinhamento do eixo d, a componente q dos fluxos tornam-se zero. A partir desta condição aplicadas
às equações de fluxo obtém-se os modelos desacoplados (novas equações) para os fluxos de rotor,
estator e de entreferro, respectivamente.
As técnicas de controle vetorial podem ser divididas em:
• Controle Vetorial Indireto:
o Orientação no Fluxo de Rotor;
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 230
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
o Orientação no Fluxo de Estator;
o Orientação no Fluxo de Entreferro;
o Controlador Universal Indireto.
• Controle Vetorial Direto:
o Orientação no Fluxo de Rotor;
o Orientação no Fluxo de Estator;
o Orientação no Fluxo de Entreferro;
o Controlador Universal Direto.
18.2.2 Método de Controle Vetorial Indireto:
O método indireto de controle vetorial tem como característica principal não apresentar a
realimentação do vetor de fluxo. Os controles do fluxo do estator e do conjugado são realizados de
forma indireta, a partir das componentes da corrente do estator. A componente s isq controla o fluxo
do estator enquanto que a componente s isd controla o conjugado.
Por isso, o método indireto é bastante dependente de um perfeito ajuste entre os parâmetros
da máquina e os usados na malha de controle. Assim, variações de temperatura, a saturação e o
efeito pelicular podem fazer com que os parâmetros da máquina apresentem variações, fazendo com
que o controle não tenha um bom desempenho. Neste método a constante de tempo do rotor (τr) é
um ponto crítico que reduz sua robustez.
O método indireto de controle vetorial baseia-se inteiramente na relação de escorregamento
da máquina e no fato desta relação ser uma condição necessária e suficiente para produzir a
orientação do campo,
Um sistema genérico de controle vetorial indireto é apresentado na figura a seguir, onde o
bloco CVI (Controle Vetorial Indireto) pode ser substituído por um controlador orientado em
qualquer um dos fluxos da máquina, os quais serão apresentados em seguida:
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 231
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
18.2.3 Método de Controle Vetorial Indireto com Orientação no Fluxo do Rotor:
A estrutura deste controlador é bastante simples ele é preferido em detrimento dos demais
controladores de método indireto com estruturas orientadas nos fluxos de estator e entreferro.
Os parâmetros da máquina, presentes no controlador, podem em situações reais, sofrer
variações devido a mudanças de temperatura, saturação, efeito pelicular, etc. Entre os parâmetros
que variam no motor a constante de tempo do rotor é a mais sensível e interfere diretamente na
resposta do controlador, por isso alguns algoritmos de estimação de parâmetros são utilizados para
melhorar a resposta do controlador.
18.2.4 Método de Controle Vetorial Indireto com Orientação no Fluxo do Estator:
Outro esquema de adaptação que consiste em utilizar a componente de eixo em quadratura
do fluxo do rotor para fazer a adaptação da constante de tempo rotórica do controlador. Esta
variável deve ser nula quando o sistema está operando em sintonia, logo é natural se pensar em
utilizá-la para a adaptação do parâmetro tr. O esquema de adaptação pode ser visto como um
MRAC em que o modelo de referência é trivial: a saída deve ser nula para qualquer valor de
entrada.
Uma das desvantagens desta estrutura é a necessidade de derivar a componente do eixo ‘q’
da corrente na obtenção do escorregamento. Isto pode acarretar valores elevados de escorregamento
para ajustes do ângulo de orientação, durante transitórios de conjugado. Assim estes valores de
escorregamento não podem ser obtidos, mas se a taxa de variação do conjugado for compatível com
os limites impostos ao inversor, a máquina responde de forma rápida a variações em degrau de sua
referência.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 232
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
Observar que existe um acoplamento entre os eixos diretos e de quadratura no controlador,
ou seja, a estrutura não apresenta um desacoplamento total entre os eixos d e q, como existe na
orientação pelo fluxo de rotor. Este acoplamento é devido às indutâncias de dispersão de estator e
de rotor existentes no modelo em fluxo para o estator
18.2.5 Método de Controle Vetorial Indireto com Orientação no Fluxo de Entreferro:
A orientação no fluxo de entreferro apresenta as mesmas características da orientação no
fluxo do estator, ou seja, necessita de diferenciação da corrente em quadratura para o cálculo do
escorregamento e o acoplamento inerente entre conjugado e fluxo em sua estrutura.
Nestes dois esquemas de orientação, segundo fluxo de estator e segundo o fluxo de
entreferro, a relação entre conjugado e freqüência de escorregamento é não linear, fazendo com que
um limite teórico de conjugado em regime permanente exista para operação com fluxo constante.
Mas esse limite é muitas vezes superior ao limite nominal da máquina, portanto não costuma
apresentar problemas em uma situação de implementação prática.
18.2.6 Controlador Universal Indireto:
Este controlador abrange em uma só estrutura todas as outras possibilidades de orientação
de fluxo.
18.2.7 Método de Controle Vetorial Direto:
Os métodos diretos de controle vetorial apresentam uma malha fechada de regulação de
fluxo, e, portanto se caracterizam pela necessidade de medição ou estimação das componentes
ortogonais do vetor fluxo, ou seja, módulo e fase do vetor. Nesse tipo de estrutura a aquisição do
vetor fluxo é de fundamental importância, sendo este o maior problema, existindo várias formas
para obtenção do fluxo.
Caso o fluxo seja diretamente medido, para a implementação prática seriam necessários
sensores para medir o fluxo: sensores de efeito hall ou bobinas exploradoras. Geralmente tais
sensores são caros, bastante sensíveis e, algumas vezes, pouco confiáveis.
Os sensores de efeito hall apresentam a vantagens que é de apresentar bom desempenho
em baixas velocidades, entretanto as dificuldades são várias: de instalação, pois necessitam
máquinas especiais que suportem a instalação. Como os sensores devem ser colocados
ortogonalmente na superfície do estator, eles acabam por apresentar sinais altamente distorcidos
causados pelo efeito das ranhuras do motor. Além disso, apresentam um desempenho ruim em
condições de excesso de vibração e de temperatura.
As bobinas exploradoras apresentam menor dificuldade de instalação e eliminam o efeito
das ranhuras do rotor, mas também necessitam de máquinas especiais para sua instalação. Sua
principal desvantagem é a necessidade de se conhecer os parâmetros da máquina para síntese do
vetor fluxo, por isso não são eficazes em baixas velocidades.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 233
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
Para contornar as dificuldades apresentadas pelo uso de sensores para medição direta da
variável do fluxo principalmente para a instalação, (por exemplo, o fluxo do rotor é uma variável na
prática inacessível), fizeram com que essa solução fosse logo descartada, e estratégias alternativas,
baseadas em técnicas de controle moderno, como estimadores de fluxo e observadores de fluxo
modelados em corrente ou em tensão e baseado no modelo da máquina, fossem os métodos mais
usados.
Os estimadores de fluxo fazem uso basicamente de grandezas terminais da máquina
como tensão, corrente e velocidade para, a partir do modelo da máquina estimar as
componentes de fluxo, mas não apresentam mecanismos para compensação de erro de predição.
Por isso tem grande sensibilidade à variação paramétrica, e assim não são eficientes em baixas
velocidades.
Os observadores de fluxo podem ser ditos como estimadores em malha fechada, ou seja,
possuem mecanismos para compensação de erro de predição, mesmo assim ainda apresentam
problemas em baixas velocidades.
Como podemos notar, o controlador vetorial direto não depende da relação de
escorregamento da máquina, mas sim da qualidade da medição da posição dos fluxos orientados.
O desacoplamento dos controles de conjugado e fluxo é dependente da constante de tempo
rotórica do motor. O desconhecimento deste parâmetro pode levar à perda da orientação de campo.
Uma forma de contornar este problema é fazer uma adaptação deste parâmetro.
18.2.8 Adaptação da Constante de Tempo Rotórica:
O cálculo do escorregamento no controle por campo orientado indireto é dependente do
conhecimento da constante de tempo rotórica do motor, parâmetro este que varia amplamente com a
temperatura do motor e com a saturação magnética. Quando a constante de tempo rotórica não é
exatamente conhecida, um erro é introduzido no cálculo do escorregamento, o que se traduz na
perda da orientação de campo. Como conseqüência, erros de conjugado e fluxo são introduzidos em
regime permanente e oscilações amortecidas aparecem nos transitórios destas variáveis. De uma
forma geral, o desempenho do controle por campo orientado é severamente degradado em função
do desconhecimento da constante de tempo rotórica do motor.
Uma das soluções para eliminar estes efeitos e manter o desempenho do controle por campo
orientado é a técnica do Controle Adaptativo por Modelo de Referência (MRAC) onde o
parâmetro a ser adaptado é a constante de tempo rotórica (tr). Neste tipo de controle, o
comportamento desejado para o motor de indução é estabelecido por um modelo denominado de
modelo de referência. A constante de tempo rotórica é adaptada para que o comportamento real do
motor de indução seja o mais próximo possível do comportamento estabelecido pelo modelo de
referência.
Diversos modelos de referência são apresentados, os quais utilizam o valor da medição de
tensão para produzir uma informação de erro (erro de sintonia) que é utilizada para adaptar o
parâmetro.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 234
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
O uso de um estimador ou de um observador se justifica por não ser essencial ao
desempenho do sistema uma medida acurada do fluxo do rotor. Apesar do fluxo observado não
representar uma boa estimativa do fluxo real, o esquema de controle apresenta bom desempenho.
A estrutura básica de um controlador vetorial direto é mostrada na figura a seguir, e da
mesma maneira que no método indireto, o bloco CVD (Controlador Vetorial Direto) pode ser
substituído por qualquer um dos esquemas dados para cada um dos fluxos controlados. Por sua vez
também o bloco estimador pode ser considerado qualquer um dos métodos de medição do fluxo.
18.2.9 Método de Controle Vetorial Direto com Orientação no Fluxo do Rotor:
Devemos observar nesta estrutura a “não dependência da resistência do rotor”, que é o
parâmetro que mais influencia no desempenho do controlador vetorial indireto. Mas os estimadores
ou observadores de fluxo usados no processo de aquisição do fluxo são baseados em modelos da
máquina, logo esta aquisição depende dos parâmetros da máquina.
Realizando-se simulações utilizando variações no valor da constante de tempo rotórica,
acima e abaixo do seu valor exato, constata-se que fazendo a adaptação da constante de tempo
rotórica o bom desempenho do controle por campo orientado em sintonia é mantido. Consegue-se
também manter o esforço de controle e a potência dissipada. O fluxo observado difere bastante do
fluxo real do rotor, e mesmo assim o parâmetro converge, mantendo o mesmo desempenho e
eficiência do controle vetorial em sintonia.
Mesmo esquemas que adotam como solução a medição direta do fluxo também são
dependentes dos parâmetros da máquina, isso porque somente o fluxo de entreferro está disponível
para medição, através dos sensores, e então estes valores medidos são convertidos nas variáveis de
rotor.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 235
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
18.2.10 Método de Controle Vetorial Direto com Orientação no Fluxo do Estator:
Para o modelo orientado no fluxo de estator, o desacoplamento não é direto. Assim
variações na corrente do eixo em quadratura poderão causar oscilações no fluxo, prejudicando a
resposta dinâmica do controlador.
Para a solução deste problema um bloco desacoplador deve ser inserido no sistema que
representa o controlador vetorial direto com orientação no fluxo de estator.
A equação do desacoplador é obtida aplicando as condições de desacoplamento a partir da
equação a da resposta de eixo direto, e considerando os valores de escorregamento de regime,
evitando assim o cálculo de algumas derivadas e afetando muito pouco a resposta do sistema.
Em todas as simulações o parâmetro converge para o valor exato com velocidade
satisfatória. A Figura 1 mostra o desempenho do controle adaptativo no seguimento de trajetória e
na variação no fluxo de eixo em quadratura.
18.2.11 Método de Controle Vetorial Direto com Orientação no Fluxo de Entreferro:
O controlador vetorial com orientação no fluxo de entreferro pode ser obtido de forma
totalmente análoga ao com orientação no fluxo de estator apresentando também os mesmos
problemas de desacoplamento (desacoplamento apenas parcial).
A estrutura do controlador que tem orientação no fluxo do entreferro é a mesma para o
fluxo de estator. O circuito desacoplador também é obtido da mesma forma, e fazendo as mesmas
simplificações.
18.2.12Controlador Universal Direto:
Assim como no controlador universal indireto, este controlador abrange em uma só
estrutura todas as outras possibilidades de orientação de fluxo.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 236
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
18.2.13Controle Vetorial com realimentação:
Geralmente, nos acionamentos elétricos com motores, além da malha de corrente têm-se
também as malhas de fluxo, de conjugado e de velocidade.
O controle total de conjugado em velocidade zero não é possível sem realimentação da
malha de fluxo e de conjugado. Além disso, se a aplicação necessitar de um erro de velocidade
inferior a 0,5%, é necessário ainda um controle vetorial com realimentação da malha de velocidade
por encoder.
18.3 Controladores de Corrente:
Nas duas últimas décadas, o abrupto desenvolvimento tecnológico motivou uma forte
pesquisa de diferentes controladores de corrente. Em particular, no que diz respeito aos motores de
indução com controle vetorial, é encontrado um número abundante e diversificado de contribuições,
indicando a importância desta área de pesquisa como também a necessidade de desenvolvimentos:
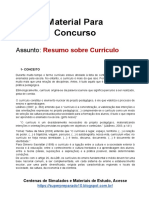
Com o intuito de oferecer uma visão geral da evolução dos controladores de corrente, na
figura a seguir é mostrada uma retrospectiva das principais contribuições da pesquisa internacional
nesta área. São mostrados os sete métodos de controladores principais, sendo cronologicamente o
controlador PI o primeiro a ser proposto (1964) e o controlador otimizado o mais recente (1994).
Método Tipo Freqüência de Chaveamento
PI Estacionário Linear Constante
PI Síncrono Linear Constante
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 237
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
Realimentação de Estados Linear Constante
Preditivo Linear Constante
Deadbeat Linear Constante
Modulação Delta Não-Linear Constante
Histerese Não-Linear Constante
Histerese Não-Linear Variável
Preditivo Freq. Min. Estac. Não-Linear Variável
Preditivo Freq. Min. Sinc. Não-Linear Variável
Otimizado On-Line Não-Linear Variável
Redes Neurais Não-Linear Variável
Lógica Fuzy Não-Linear Variável
18.4 Técnica de Controle Direto do Conjugado por Orientação de Fluxo do estator:
Mais recentemente, outras técnicas de controle não-linear têm sido desenvolvidas e
utilizadas com o objetivo de aumentar a robustez e melhorar o desempenho sob determinadas
condições de operação. Um exemplo é a técnica de Controle Direto do Conjugado (DTC – Direct
Torque Control), na qual o conceito de orientação de campo do estator que se observa é diferente
do conceito apresentado pelo Controle por Orientação de Campo.
O Controle Direto do Conjugado (DTC) começou a ser desenvolvido na década de 80, a
partir de trabalhos de Takahashi e Noguchi (1985) e Depenbrock (1988), aplicando princípios de
orientação de campo e modulação espacial. Dentre as muitas promessas dessa técnica destaca-se a
substituição de motores de corrente contínua em aplicações de velocidade variável. O DTC se
caracteriza pela ausência de blocos independentes de modulação da tensão (do tipo PWM), mas
pela presença de oscilações de ripple nas malhas de conjugado e fluxo devidas aos ciclos-limite,
ocasionados pelo controle por histerese.
O regulador de corrente de histerese convencional, em muitas aplicações industriais,
satisfaz os requerimentos de desempenho e largura de faixa. As vantagens do regulador de histerese
são bastante conhecidas: excelente dinâmica, pequena ondulação de corrente e pico limitado de
corrente. Como possui uma faixa fixa para a variação da ondulação da corrente, este tipo de
regulador não tem problema de sobrecorrente, sendo que as formas de onda da corrente são
aproximadamente senoidais em toda a faixa de freqüência e a regulação da corrente não é afetada
com a variação dos parâmetros da carga.
A técnica DTC é uma estratégia de acionamento orientada com relação ao fluxo do
estator. As estratégias de acionamento de motores orientadas com relação ao fluxo do estator
apresentam menor sensibilidade à variação de parâmetros da máquina do que a técnica de
controle por orientação de campo. Essa orientação é obtida de forma automática pela aplicação da
técnica, a qual utiliza estimadores de fluxo do estator.
No DTC, as grandezas fluxo do estator e conjugado são controladas diretamente, através do
controle por histerese. Dessa forma não há necessidade de um desacoplador para separar fluxo e
conjugado. Tal separação ocorre como conseqüência das malhas de controle independentes.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 238
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
A aplicação da técnica DTC implica na estimação do fluxo do estator e do conjugado
eletromagnético, que são grandezas necessárias às malhas de controle.
O fluxo do estator é estimado a partir do modelo de fluxo (Equação), que na prática é
separado em dois modelos de estado de ordem reduzida denominados: modelo de corrente e modelo
de tensão. Esses modelos são denominados observadores de fluxo de malha aberta por não
apresentarem realimentação para correção de erro.
O fluxo estimado é utilizado, juntamente com a medida da corrente do estator, para estimar
o conjugado eletromagnético. Para isso é necessária que se desenvolva uma expressão de conjugado
adequada.
18.4.1 Maneiras de se Estimar o Fluxo:
Comparando-se os modelos com relação à sensibilidade à variação de parâmetros, pode-se
observar que:
• O estimador baseado no modelo de corrente não é influenciado diretamente nem pela
velocidade do rotor, e nem pela freqüência de alimentação da máquina, mas sim pelo
escorregamento. Daí o fato dele utilizar, além das medidas da corrente do estator,
também da velocidade do rotor ou, no mínimo, da posição angular do rotor, para
realizar a transformação de coordenadas, calculando o escorregamento por fim e
produzindo a estimativa de fluxo. O fato de necessitar da velocidade do rotor (ou
posição angular do rotor) para estimar o fluxo consiste na grande desvantagem deste
método.
• O estimador baseado no modelo de tensão possui uma topologia de simples
implementação, sensibilidade apenas ao parâmetro resistência do estator: a resistência
do estator é único parâmetro que influencia na estimação do fluxo do estator, através do
modelo de tensão. Todos os outros parâmetros permanecem constantes. Alem disso, ele
utiliza apenas variáveis que são referenciadas ao estator. Além disso, ele não depende
da velocidade ou da posição do rotor, que no caso da implementação necessita ser
medida ou estimada. Dessa forma, na grande maioria das implementações da estratégia
DTC, ele é o estimador adotado.
Devido à necessidade de aperfeiçoar, além de adaptar a técnica DTC para sua utilização na
indústria, inúmeras alternativas vêm sendo propostas, apresentando soluções para problemas tais
como a freqüência de chaveamento variável e o alto ripple de conjugado, ocasionados pelo controle
por histerese.
18.4.2 Estrutura e funcionamento do DTC:
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 239
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
A figura a seguir apresenta um diagrama de blocos resumido da técnica DTC. O objetivo
principal desta técnica é o controle do conjugado e do fluxo do estator, realizado através de
comparadores com histerese, o que assegura uma rápida resposta de conjugado.
A lógica de chaveamento é utilizada para selecionar o vetor de tensão a ser aplicado ao
estator, determinando as chaves que serão acionadas no inversor (modulação espacial). A seleção
do vetor tensão é realizada de forma a manter o conjugado e o fluxo do estator dentro dos limites
determinados pelos comparadores com histerese. Há seis vetores de tensão possíveis com amplitude
diferente de zero e dois vetores nulos, que são escolhidos em função dos erros entre os valores de
referência e os valores estimados de conjugado e fluxo. Os vetores de tensão são obtidos através da
escolha de acionamento dos pares de transistores do inversor de tensão.
O modelo do motor nos fornece uma estimativa do estado atual do motor. O fluxo e o
conjugado estimados são utilizados na modulação espacial enquanto que a freqüência do estator e a
velocidade mecânica (cujas estimativas não aparecem na figura anterior) podem ser utilizadas na
malha externa de controle de velocidade.
Com a implementação do DTC, é possível a obtenção de uma resposta de conjugado rápida
– da ordem de milissegundos.
A técnica DTC mostra vantagens, tais como a ausência de transformações de coordenadas e
o menor tempo de resposta de conjugado, se comparadas com as técnicas de controle por orientação
de campo.
Embora o regulador de histerese possua característica de robustez e de resposta dinâmica
amplamente reconhecida, as suas desvantagens também limitam a utilização deste regulador: a sua
principal desvantagem está na impossibilidade de obter vetores de tensão zero, gerando desta forma,
interferência entre as fases do motor. Soma-se a isto, os fatos da freqüência de chaveamento não ser
constante e se tornar excessivamente alta quando a faixa de histerese é muito estreita produzindo o
fenômeno de ciclo limite que acontece quando a freqüência de chaveamento alcança a freqüência
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 240
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
das chaves semicondutoras, e ainda do processo de modulação gerar uma grande quantidade de
componentes subarmônicos.
18.5 Controladores de Corrente com PWM:
O modulador PWM fornece freqüência de chaveamento constante e um espectro de
harmônicos definido, eliminando, dessa forma, o excessivo ruído acústico dos reguladores de
histerese.
A utilização da modulação vetorial PWM nos controladores de corrente, permite, pelo
menos teoricamente, infinitos vetores espaciais de tensão aplicados na carga (e não os apenas oito
vetores fundamentais do controlador de histerese). O modulador PWM fornece uma freqüência de
chaveamento constante e um espectro de harmônicos definido, eliminando, dessa forma, o
excessivo ruído acústico dos reguladores de histerese.
Em geral, nos controladores que utilizam modulação PWM a ondulação de corrente não é
diretamente controlada. Isto acontece porque a constante de tempo da ondulação é várias vezes
superior ao período de chaveamento, limitando o controle da ondulação da corrente. Uma possível
solução é aumentar a freqüência de chaveamento, embora esta freqüência seja limitada em muitas
aplicações. Uma outra solução consiste em ajustar a ondulação em função do ponto de operação;
neste caso os parâmetros do controlador devem ter um ajuste dinâmico para cada faixa de operação
do sistema.
18.6 Controlador PI síncrono:
O controlador PI síncrono apresenta boa robustez dinâmica.
O Controlador PI Síncrono é recomendado para os acionamentos de motor CA controlado
por orientação de campo. Neste sistema, os componentes síncronos das correntes do estator Isq e Isd
são grandezas CC e, dessa forma, os reguladores PI reduzem os erros da componente fundamental a
zero. O controlador de corrente PI síncrono de comparação de rampa tornou-se um produto
comercial e está presente na maioria dos acionamentos de motor de indução com orientação de
campo.
A fácil sintonização, a estabilidade com a variação de parâmetros do motor, o idealmente
erro de rastreio nulo em regime estacionário e baixa complexidade de implementação fazem, deste
controlador, a melhor opção, permitindo um bom equilíbrio entre desempenho e complexidade.
A figura a seguir mostra o controlador síncrono com dois reguladores PI, um para o
componente direto e outro para o componente em quadratura do sistema de referência síncrono d-q.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 241
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
No caso do controlador de corrente alimentar uma máquina de indução, as funções de
transferência em coordenadas d-q permitem observar a influência e o grau de acoplamento entre as
componentes de eixo direto Isd e em quadratura Isq. As variáveis Isd e Isq, quando a malha externa é o
controle vetorial, estão associadas diretamente às magnitudes de fluxo e conjugado
respectivamente, permitindo a realização de uma análise do sistema com maior profundidade.
No controlador PI síncrono, o aumento da freqüência síncrona aumenta também as
amplitudes de oscilação da resposta transitória, mas o erro de regime permanente sempre é nulo,
anulando o erro de rastreio (erro entre a corrente de referência e a corrente real) que existia no
regulador PI estacionário em regime permanente.
Embora apresente as vantagens acima mencionadas, experimentalmente o controlador PI
síncrono não possui ganho infinito (erro de rastreio nulo) em regime permanente, já que este ganho
está limitado pelos erros de sintonia no controle vetorial.
A variação dos parâmetros da máquina de indução não influencia a estabilidade do sistema,
sendo esta determinada fundamentalmente pela freqüência e velocidade mecânica. Quando o motor
opera com orientação de campo de rotor, a velocidade deixa de influenciar na estabilidade do
sistema, no PI síncrono.
Operando com orientação de fluxo do rotor, a componente em quadratura do vetor de fluxo
do rotor é nula, tem como vantagem, além claro daquela inerente à orientação, a eliminação das
componentes complexas nos pólos e zeros do sistema, melhorando a resposta do controlador (seja o
PI síncrono ou o preditivo síncrono).
Portanto, este estudo tem como meta avaliar as aplicações do controle vetorial (completo e
simplificado) em acionamentos de motores de indução, com a finalidade de se obter excelente
performance (elevada precisão e rápida resposta dinâmica), adequada para acionamentos
comerciais, industriais, agroindustriais e em quaisquer atividades em que se necessite de controlar a
velocidade e o conjugado de motores convencionais.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 242
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
18.7 Outros Controladores de Corrente:
O controlador preditivo, por sua vez, oferece a vantagem de menor ondulação quando
comparado com os controladores PI, maior estabilidade com a variação dos parâmetros do motor de
indução e sintonização sistemática baseada nos parâmetros do motor de indução. A necessidade de
um observador robusto de tensão induzida limita a utilização deste controlador em aplicações de
alto desempenho nas quais a complexidade na implementação do controlador não é um aspecto
limitante.
Os controladores PI fuzzy aplicados a controladores de corrente, no balanço desempenho-
complexidade, são inferiores aos controladores PI e preditivo. O fato da sintonização deste
controlador ser muito dependente do ponto de operação, é algo que limita a sua aplicação a casos
nos quais a exigência dinâmica é baixa. Este inconveniente pode ser resolvido aumentando o
número de informações ao controlador, com o conseqüente aumento de regras e complexidade de
implementação. Embora, o projeto de controladores de corrente “fuzzy” não utilize os modelos
matemáticos clássicos, ele exige o profundo conhecimento do comportamento do sistema para a
definição correta do conjunto de regras do controlador. Outro fator crítico no projeto, é o ganho
proporcional que sempre é necessário para cada uma das variáveis de entrada do controlador; se
esta variável não for ajustada corretamente, as regras não serão acionadas apropriadamente e o
controlador poderá gerar instabilidade no sistema.
O conjunto de regras do controlador de corrente “fuzzy” pode ser otimizado para melhorar
o desempenho em determinados pontos de operação do sistema. Com isto, em determinadas
aplicações, uma solução com dois controladores, um controlador PI convencional para o transitório
e outro controlador “fuzzy” otimizado para uma região de operação pré-determinado pode ser
apropriada.
18.8 Controle Ótimo:
Muitos controladores não-lineares vem sendo estudados com o objetivo de aumentar a
eficiência do desempenho dinâmico dos motores de indução. Muitos destes controladores operam
com fluxo constante, fixo em um valor nominal. Neste caso, a eficiência é máxima somente quando
o sistema opera com conjugado nominal. Fora deste ponto de operação, a máquina pode dissipar
muita potência ou armazenar muita energia nas bobinas. Em muitas aplicações os motores não
operam somente em sua condição nominal e o conjugado desejado pode ser dependente de outros
estados do sistema (posição ou velocidade). Por este motivo é importante estudar outros modos de
operação de fluxo visando otimizar a eficiência do sistema.
Outro aspecto importantíssimo da nova geração de conversores de freqüência consiste em
sua metodologia de Colocação em Operação, bem simples e rápida, baseando-se na utilização de
softwares de parametrização que, além de possibilitarem a comunicação com qualquer PC de modo
elementar viabilizando a otimização perfeita das características do motor de acordo com as reais
necessidades da carga, proporcionam ao motor dinâmica, estabilidade e precisão.
Nesses softwares já estão incluídos os modelos matemáticos dos motores assíncronos
trifásicos, não sendo necessário incluir nenhum dado, apenas selecionar seu modelo e sua tensão de
alimentação de acordo com os dados contidos na plaqueta do próprio motor.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 243
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
A dinâmica oferecida a esses motores é em função do seu modo de controle vetorial, que é
o responsável direto pelo modelamento do fluxo magnético do motor.
No ambiente de parametrização, são selecionados os motores utilizados, o modo de
operação desejado e são introduzidas as informações básicas como o tipo do motor, tensão,
freqüência e corrente. A partir desse ponto, são fornecidos ao sistema os dados do modelamento
matemático do motor e são calculados os parâmetros usuais e de controle, resultando numa
otimização da performance do motor.
Alguns softwares possibilitam efetuar a programação e controle de movimentos seqüenciais
através de programação em Assembler, Ladder, C++, entre outras, comuns às utilizadas nos
Controladores Lógicos Programáveis, inclusive com funções e blocos lógicos.
18.9 Glossário:
(1) Paralelismo:
Quanto mais hardware trabalha simultaneamente, maior performance, aumentando no tempo o
número total de tarefas que podem ser realizadas ao mesmo tempo, com arquitetura
caracterizada por processadores multi-núcleos que possibilitam o multi-processamento em um
único molde de aplicações multi-thread (programas que consistem de várias seções menores
independentes;).
(2) Máquina de Estados Finitos:
A Máquina de Estados, ou mais precisamente, Máquina de Estados Finitos (Finite State Machine -
FSM), é um dispositivo e uma técnica que permitem o projeto simples e preciso da funcionalidade
de controladores de lógica seqüencial. A idéia por trás de uma Máquina de Estados Finitos é que um
sistema como uma máquina com controles eletrônicos só pode estar atuando dentro um limitado
(finito) número de estados. O uso métodos de Máquina de Estado no desenvolvimento de programa
de computação, circuitos de lógica seqüencial ou sistemas de controle de eletrônica digital permite a
elaboração projetos com mais sofisticação e facilidade. Uma Máquina de Estados Finitos trabalha
com estradas estáticas ou transitórias e tem “resposta dependente de contexto”, ou seja, responde a
uma determinada entrada sob de várias circunstâncias. O primeiro passo em qualquer projeto de
Máquina de Estados Finitos é identificar os estados significantes do sistema; precisamos incluir
todos os estados importantes, mas evitar incluir estados desnecessários. A ferramenta de projeto
principal para Máquinas de Estados Finitos é o Diagrama de Transição de Estados, também
chamado um diagrama de estados, o qual descreve as relações entre os estados do sistemas e os
eventos que fazem o sistema mudar de um estado a outro.
18.10 CONCLUSÃO:
Argumentos à parte, a evolução dos Conversores de Freqüência trouxe benefícios em todos
os segmentos, dentro e fora da indústria.
• Equipamentos aprimorados tecnologicamente, que apresentam maior tecnologia
empregada, são mais confiáveis, proporcionando maior dinâmica, além de possuírem
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 244
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
precisão da ordem de minutos de grau (atendendo às mais rígidas solicitações de tolerância)
e são muito mais compactos, oferecendo inclusive níveis de segurança e confiabilidade
incríveis.
A tecnologia atual desenvolvida para inversores destinados a aplicações de variações de
velocidade em motores CA de indução trifásicos, apresentando as seguintes vantagens:
• Controle escalar / vetorial programáveis no mesmo produto;
• Controle vetorial sem encoder (sensorless) e opcionalmente com
encoder;
• Controle vetorial sensorless com alto torque e rapidez na resposta em
velocidades muito baixas e na partida;
• Auto-ajuste adaptando automaticamente o controle vetorial a um dado
motor e carga;
• Controlador Programável interado: Um cartão especial permite com que
o inversor de freqüência assuma as funções equivalentes às de um CLP
de pequeno porte e de um módulo controle de trajetória.
Exemplo de trajetória com utilização da placa PLC-01:
18.11 Novos Método de Frenagem de motores elétricos:
Contínuas pesquisas e desenvolvimento de produtos dotados de tecnologia de ponta,
com destaque para os conversores de freqüência utilizados no acionamento de motores
elétricos de indução, tem levado a inovações tecnológicas.
Para aplicações que exijam tempos de parada reduzidos e / ou paradas de cargas de
elevada inércia, os inversores tradicionais utilizam-se da Frenagem Reostática, onde a
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 245
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
energia cinética da carga é regenerada ao link DC do inversor e cujo excesso é dissipado
sob a forma de calor em um resistor de frenagem, interligado ao circuito de potência.
Recentemente a WEG patenteou um método de frenagem de motores elétricos com
inversores de freqüência, que dispensa o uso de resistores de frenagem comumente
utilizados nos inversores para a desaceleração dos motores, reduzindo o custo do produto
pela dispensa destes resistores.
Os avançados e princípios tecnológicos desta invenção foram incorporados na
função “Optimal Braking®” ou "Frenagem Ótima", disponível na linha de inversores de
freqüência CFW-09, para o modo vetorial, a qual possibilita uma frenagem ótima capaz de
atender a muitas aplicações até então somente atendidas pelo método da frenagem
reostática. Esta tecnologia permite a frenagem do motor com torque maior do que aquele
obtido com métodos tradicionais, como a frenagem por injeção de corrente contínua
(frenagem CC) que é comumente utilizado.
A invenção foi certificada nos Estados Unidos, pelo Serviço de Marcas e Patentes
do governo americano. A patente PI 0003903 refere-se a um "Método de frenagem de uma
máquina de indução de velocidade variável controlada por vetor, que compreende um
método e um dispositivo de controle para frear uma máquina de indução de velocidade
variável controlada por vetor, acionada por inversor PWM, no qual o componente de
corrente-d e o componente de corrente-d da corrente do estator são controlados
independentemente um do outro de acordo com um primeiro sinal de referência (i~ q~*) e
um segundo sinal de referência (i~ d~*), respectivamente. Para frenagem, componentes de
alta freqüência são superimpostos em dito segundo sinal de referência (i~ d~*), e o valor
RMS (i~ d RMS~) e o valor médio (i~ d av~) do segundo sinal de referência a ser obtido
são controlados independentemente um do outro de modo que os requisitos de campo são
atendidos por meio do valor médio e altas perdas de máquina são produzidas por meio do
valor RMS.
Com a tecnologia "Optimal Braking", tanto as perdas totais no motor como as
perdas no inversor são utilizadas para obter um torque de desaceleração da carga mais
elevado, possibilitando acionamentos com alta performance dinâmica sem o uso do resistor
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 246
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
de frenagem e evitando o desligamento do inversor pela atuação da proteção de
sobretensão, com torques frenantes da ordem de 5 vezes o torque característico de uma
frenagem CC.
ALLenz
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina” 247
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: nai106@sp.senai.br
Vous aimerez peut-être aussi
- Pliometria Sequencia Racional - João Coutinho PDFDocument90 pagesPliometria Sequencia Racional - João Coutinho PDFFernando Galvão100% (3)
- Siemens Micromaster 430 COM PT 0805Document51 pagesSiemens Micromaster 430 COM PT 0805Navegador9100% (4)
- A Porta Encantada Do NatalDocument11 pagesA Porta Encantada Do NatalAline KalbuschPas encore d'évaluation
- SAMANTHA - Meus Quatro Recomeco - Bruna RodriguesDocument353 pagesSAMANTHA - Meus Quatro Recomeco - Bruna RodriguesAbigail FelberPas encore d'évaluation
- A espiral do silêncio e a formação da opinião públicaDocument12 pagesA espiral do silêncio e a formação da opinião públicaLara Camargo50% (4)
- Manual para Clínicas de ReabilitaçãoDocument40 pagesManual para Clínicas de ReabilitaçãoAtaualpa MacielPas encore d'évaluation
- Avaliação Barroco 1º AnoDocument3 pagesAvaliação Barroco 1º AnoKellin Callegari100% (3)
- Manual Buffalo 3 e 4 CilDocument37 pagesManual Buffalo 3 e 4 CilXundaBugrillPas encore d'évaluation
- Gerenciamento Do Descarte de ResíduosDocument46 pagesGerenciamento Do Descarte de ResíduosCristiano Partata BorgesPas encore d'évaluation
- Catalogo LegrandDocument828 pagesCatalogo LegrandCarmen AmorinPas encore d'évaluation
- Tecnicas de Controle Senai PARTE02Document31 pagesTecnicas de Controle Senai PARTE02Evalgues De Souza Borges100% (1)
- Teoria 18 Filosofia de Controle VetorialDocument23 pagesTeoria 18 Filosofia de Controle VetorialmarcoraphaelPas encore d'évaluation
- Proc Ind PDFDocument60 pagesProc Ind PDFWadson Leite BarbosaPas encore d'évaluation
- MAE - Conceitos de Comandos Eletricos PDFDocument16 pagesMAE - Conceitos de Comandos Eletricos PDFMario SantanaPas encore d'évaluation
- Inversor de Controle EscalarDocument11 pagesInversor de Controle EscalarJosé Roberto StanganiniPas encore d'évaluation
- Comunicação entre Drive e PCDocument27 pagesComunicação entre Drive e PCNavegador9100% (3)
- Teoria 17 Filosofia de Controle Escalar PDFDocument11 pagesTeoria 17 Filosofia de Controle Escalar PDFNavegador9Pas encore d'évaluation
- 5 Aula - PRATICA COM INVERSOR DE FREQUENCIADocument21 pages5 Aula - PRATICA COM INVERSOR DE FREQUENCIAnot bookPas encore d'évaluation
- Artigo - U1000 Características, Benefícios e AplicaçõesDocument3 pagesArtigo - U1000 Características, Benefícios e AplicaçõesNavegador9Pas encore d'évaluation
- Artigo - U1000 Características, Benefícios e AplicaçõesDocument3 pagesArtigo - U1000 Características, Benefícios e AplicaçõesNavegador9Pas encore d'évaluation
- Zona de Raizes-2009 Artigo 181Document10 pagesZona de Raizes-2009 Artigo 181Márlon PalmeiraPas encore d'évaluation
- Tipos de Biodigestor - Energias Renováveis PDFDocument107 pagesTipos de Biodigestor - Energias Renováveis PDFNavegador9Pas encore d'évaluation
- Tratamento de Esgoto Por Zona de RaízesDocument9 pagesTratamento de Esgoto Por Zona de RaízesthiagobioufgPas encore d'évaluation
- Algumas Regras Práticas para Oficiais de QuartDocument10 pagesAlgumas Regras Práticas para Oficiais de QuartGuilherme Azevedo100% (3)
- Meu Pequeno Milagre (Gabby Santos)Document47 pagesMeu Pequeno Milagre (Gabby Santos)Janaina De Araujo CamargoPas encore d'évaluation
- Анализатор Спектра На 400 СветодиодовDocument6 pagesАнализатор Спектра На 400 СветодиодовmarcosscaratoPas encore d'évaluation
- Estrela e Suas OrigensDocument5 pagesEstrela e Suas Origensvitor100% (1)
- Cifras Ceia Do Senhor 2020Document12 pagesCifras Ceia Do Senhor 2020Milton AlvesPas encore d'évaluation
- Estudo sobre suicídio usando Escala BeckDocument2 pagesEstudo sobre suicídio usando Escala BeckRogerValérioPas encore d'évaluation
- O reinado de Cristo na terra durante o milênioDocument9 pagesO reinado de Cristo na terra durante o milênioRose LuciaPas encore d'évaluation
- Refração Da LuzDocument2 pagesRefração Da Luzanita salezzePas encore d'évaluation
- Sequência Didática FábulasDocument34 pagesSequência Didática FábulasKelin Albani SchwaabPas encore d'évaluation
- Você É Precioso para Ele - David Wilkerson PDFDocument9 pagesVocê É Precioso para Ele - David Wilkerson PDFAnonymous ncYGha5Pas encore d'évaluation
- IST Transferencia de Massa PDFDocument27 pagesIST Transferencia de Massa PDFxcite4everPas encore d'évaluation
- Simulado 04 - : PortuguêsDocument16 pagesSimulado 04 - : PortuguêsLavynia AndrielyPas encore d'évaluation
- Comparativo Entre Centrais de PortariaDocument6 pagesComparativo Entre Centrais de PortariaRobert GonçalvesPas encore d'évaluation
- Apostila Violao Nivel Zero 1 - MAIS QUE MUSICA - 2013Document13 pagesApostila Violao Nivel Zero 1 - MAIS QUE MUSICA - 2013Ricardo CalvelliPas encore d'évaluation
- Água KangenDocument9 pagesÁgua KangenSimone Coutinho BlancoPas encore d'évaluation
- Catalogo Mahle Ficha TecnicaDocument3 pagesCatalogo Mahle Ficha TecnicaJuarlan WeltonPas encore d'évaluation
- Exercício de HTML e CSS - Arquivo 2Document5 pagesExercício de HTML e CSS - Arquivo 2Pedro PauloPas encore d'évaluation
- Cristalografia e formas dos mineraisDocument24 pagesCristalografia e formas dos mineraisOsmar Juazeiro0% (1)
- Material Concurso - Resumo Currículo PDFDocument5 pagesMaterial Concurso - Resumo Currículo PDFKaIque StefannoPas encore d'évaluation
- Sem Isolamento: Etnografia de Pessoas em Situação de Rua Na Pandemia de Covid-19Document8 pagesSem Isolamento: Etnografia de Pessoas em Situação de Rua Na Pandemia de Covid-19Ana De Moraes QuintasPas encore d'évaluation
- Arte Pré-Histórica: Paleolítico e NeolíticoDocument2 pagesArte Pré-Histórica: Paleolítico e NeolíticoFulano TalPas encore d'évaluation
- Falomaquia PDFDocument18 pagesFalomaquia PDFRolf Malungo de SouzaPas encore d'évaluation
- Memorial Descritivo Adcos Rgo-R03Document7 pagesMemorial Descritivo Adcos Rgo-R03Adams Leandro Alves PereiraPas encore d'évaluation