Vous aimerez peut-être aussi
- EE355L Lab Report: Convolution of Exponential FunctionsDocument12 pagesEE355L Lab Report: Convolution of Exponential FunctionsMuhammad Umer ShakirPas encore d'évaluation
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99D'EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Pas encore d'évaluation
- Guide 5 - Homogeneous MatricesDocument11 pagesGuide 5 - Homogeneous MatricesAna Julia AndradePas encore d'évaluation
- Lab 1&2 LcsDocument13 pagesLab 1&2 LcsMoiz SiddiquiPas encore d'évaluation
- Monte Carlo - Simulation - Using - Excel - For - PredictingDocument6 pagesMonte Carlo - Simulation - Using - Excel - For - PredictingalePas encore d'évaluation
- Lab 10-Descrete Fourier Transform and Circular ConvolutionDocument8 pagesLab 10-Descrete Fourier Transform and Circular ConvolutionAleena QureshiPas encore d'évaluation
- AP Calculus BC Saturday Study Session #1: The Big TheoremsDocument18 pagesAP Calculus BC Saturday Study Session #1: The Big TheoremsAlaka KondaPas encore d'évaluation
- 636f65a5d5f80SS Lab6 FAll2022Document7 pages636f65a5d5f80SS Lab6 FAll2022Muhammad YousafPas encore d'évaluation
- APznzabAA8DlTmCUYILoDMv Hh0irgFdV PlK2 PJPZEGNkrblnb0FhLCUXRhrn0tGxxVw3qoPHE2Dc9vTrsgPykjO75 Imlg3KsEtkRswHtY6L LPgoHO6uPfCmqB5KOU76pnDKKuyAI8decuYJ9t6SmVmbaCqVdclN9R 3We4ay2kvfKiLnI2lKlcMuduTk4cl2ptW (4)Document6 pagesAPznzabAA8DlTmCUYILoDMv Hh0irgFdV PlK2 PJPZEGNkrblnb0FhLCUXRhrn0tGxxVw3qoPHE2Dc9vTrsgPykjO75 Imlg3KsEtkRswHtY6L LPgoHO6uPfCmqB5KOU76pnDKKuyAI8decuYJ9t6SmVmbaCqVdclN9R 3We4ay2kvfKiLnI2lKlcMuduTk4cl2ptW (4)Johnbob ToveraPas encore d'évaluation
- Signals and Systems Model 1&2 FINAL22Document10 pagesSignals and Systems Model 1&2 FINAL22GiriPas encore d'évaluation
- Online Control Lecture #2Document33 pagesOnline Control Lecture #2Noor GamingPas encore d'évaluation
- Impulse Response and Correlation: 4.1 ObjectivesDocument2 pagesImpulse Response and Correlation: 4.1 ObjectivesAmna ArshadPas encore d'évaluation
- Finding Fourier Transform and Plotting SpectraDocument8 pagesFinding Fourier Transform and Plotting SpectraramPas encore d'évaluation
- Lab2 Control SystemDocument43 pagesLab2 Control Systemعبدالملك جمالPas encore d'évaluation
- Assignment 1Document4 pagesAssignment 1Michael AwaPas encore d'évaluation
- Laboratory 9 - Laplace TransformDocument11 pagesLaboratory 9 - Laplace TransformOsama AlqahtaniPas encore d'évaluation
- 1st Sem BCA MidtermDocument10 pages1st Sem BCA MidtermJitendra MalikPas encore d'évaluation
- Lab # 5 - MergedDocument10 pagesLab # 5 - MergedMuhammad Umer ShakirPas encore d'évaluation
- Final EST SolutionDocument4 pagesFinal EST SolutionShubham ThakurPas encore d'évaluation
- 10 1 1 50Document6 pages10 1 1 50Alex KayrinPas encore d'évaluation
- Louise Lope Adonis Pabillaran - Activity 3Document11 pagesLouise Lope Adonis Pabillaran - Activity 3Louise Lope PabillaranPas encore d'évaluation
- Lec02 Math Foundation1Document5 pagesLec02 Math Foundation1Josena SSPas encore d'évaluation
- Automatic Control III Homework Assignment 3 2015Document4 pagesAutomatic Control III Homework Assignment 3 2015salimPas encore d'évaluation
- EE-232 Lab Manual Signals and SystemsDocument57 pagesEE-232 Lab Manual Signals and SystemsMuhammad YousafPas encore d'évaluation
- 1 Pre-Lab: Lab 07: Sampling, Convolution, and FIR FilteringDocument12 pages1 Pre-Lab: Lab 07: Sampling, Convolution, and FIR Filteringdemetrickn0% (1)
- ECE 4600 - Introduction To Systems and Signals: Take Home Lab /#: .... 6.....Document14 pagesECE 4600 - Introduction To Systems and Signals: Take Home Lab /#: .... 6.....Juju JantonPas encore d'évaluation
- Unit Iv: Continuous and Discrete Time SystemsDocument32 pagesUnit Iv: Continuous and Discrete Time SystemsAnbazhagan SelvanathanPas encore d'évaluation
- Basic Block and Flow GraphDocument11 pagesBasic Block and Flow GraphSudhanshuSoniPas encore d'évaluation
- Graphing With Higher-Order ProceduresDocument11 pagesGraphing With Higher-Order ProceduresdarkunPas encore d'évaluation
- Homework 2: ME 570 - Prof. TronDocument15 pagesHomework 2: ME 570 - Prof. TronKaniel OutisPas encore d'évaluation
- Laplace TransformDocument68 pagesLaplace TransformNishat Jahan TarannumPas encore d'évaluation
- Algorithms and Correctness Past PaperDocument7 pagesAlgorithms and Correctness Past PaperBilly GenePas encore d'évaluation
- Space Simulation Lab ManualDocument55 pagesSpace Simulation Lab ManualBhanuPas encore d'évaluation
- Frame Representations For Texture SegmentationDocument10 pagesFrame Representations For Texture SegmentationSushman CoolPas encore d'évaluation
- wph16 01 Rms 2023.10Document14 pageswph16 01 Rms 2023.10jie714408Pas encore d'évaluation
- Southern University College BALS 3033 Logic System Design Final ExamDocument4 pagesSouthern University College BALS 3033 Logic System Design Final ExamZhong Kiat TehPas encore d'évaluation
- Lec - 3-4 - Transfer Function and Laplace TransformDocument54 pagesLec - 3-4 - Transfer Function and Laplace TransformMaryam BhattiPas encore d'évaluation
- 3.7 Saving and Loading DataDocument23 pages3.7 Saving and Loading Datanikhil tiwariPas encore d'évaluation
- Lab 05-The Z Transform: Objectives: Time Required: 3 Hrs Programming Language: MATLAB Software RequiredDocument5 pagesLab 05-The Z Transform: Objectives: Time Required: 3 Hrs Programming Language: MATLAB Software RequiredAleena QureshiPas encore d'évaluation
- AE157_Spring2015_Hw_01Document3 pagesAE157_Spring2015_Hw_01reiner satrioPas encore d'évaluation
- Lab#04 Frequency Modulation/Demodulation ObjectiveDocument6 pagesLab#04 Frequency Modulation/Demodulation ObjectivewaleedPas encore d'évaluation
- EE201_W02_Signals Classifications (2) and Signals TransformationsDocument53 pagesEE201_W02_Signals Classifications (2) and Signals TransformationsDARKII Q8Pas encore d'évaluation
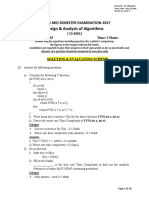
- 2017 Mid-Daa SolutionDocument16 pages2017 Mid-Daa SolutionDebanik DebnathPas encore d'évaluation
- Chapter 7 Intermediate RepresentationDocument29 pagesChapter 7 Intermediate RepresentationmoienPas encore d'évaluation
- Control Manual FinalDocument65 pagesControl Manual Finalfeeta singhPas encore d'évaluation
- Tensors in MathematicaDocument6 pagesTensors in MathematicaDennis La Cotera0% (1)
- Transfer Function Numerical SolutionsDocument6 pagesTransfer Function Numerical Solutionsok dokterPas encore d'évaluation
- Mobile Robot Path Tracking LabDocument6 pagesMobile Robot Path Tracking LabOK BrosPas encore d'évaluation
- TCS 502 AssignmentDocument12 pagesTCS 502 Assignmentapi-381239125% (8)
- Eng632d1 CW1Document8 pagesEng632d1 CW1Kobi Smith100% (1)
- AsymptoticDocument27 pagesAsymptoticshobhanrockstarPas encore d'évaluation
- Lab 1 PDFDocument4 pagesLab 1 PDFqamberPas encore d'évaluation
- LabReportManual HPLCDocument3 pagesLabReportManual HPLCCindhy ChamorroPas encore d'évaluation
- Chapter 2 - Reduction of Multiple SystemDocument46 pagesChapter 2 - Reduction of Multiple SystemHaqeemee HusseinPas encore d'évaluation
- Component ReliabilityDocument25 pagesComponent ReliabilityJagdeeshChoudharyPas encore d'évaluation
- Drill 4 Soquiat Marc HendriDocument9 pagesDrill 4 Soquiat Marc HendriMarc Hendri SoquiatPas encore d'évaluation
- Functions For Block Reduction in SIMULINKDocument9 pagesFunctions For Block Reduction in SIMULINKawais anwarPas encore d'évaluation
- Unit 3Document24 pagesUnit 3websurfer2002Pas encore d'évaluation
- DIP Lab 3: Nishat Ahmed 24 September 2019Document6 pagesDIP Lab 3: Nishat Ahmed 24 September 2019Nishat AhmedPas encore d'évaluation
- Assignment 1 PDFDocument1 pageAssignment 1 PDFNishat AhmedPas encore d'évaluation
- Objective: Computer Networks Laboratory Manual #9Document14 pagesObjective: Computer Networks Laboratory Manual #9Nishat AhmedPas encore d'évaluation
- Assignment 1 PDFDocument1 pageAssignment 1 PDFNishat AhmedPas encore d'évaluation
- EE 384L Lab #7 Z-Transform AnalysisDocument5 pagesEE 384L Lab #7 Z-Transform AnalysisNishat AhmedPas encore d'évaluation
- Lab 5Document5 pagesLab 5Nishat AhmedPas encore d'évaluation
- 2 Fourier Wavelets HMM SVM PDFDocument176 pages2 Fourier Wavelets HMM SVM PDFNishat AhmedPas encore d'évaluation
- TT Spring 19 V4 PDFDocument1 pageTT Spring 19 V4 PDFNishat AhmedPas encore d'évaluation
- H Bridge A4Document13 pagesH Bridge A4Nishat AhmedPas encore d'évaluation
- Digital Signal Processing Lab 05 AssignmentDocument2 pagesDigital Signal Processing Lab 05 AssignmentNishat AhmedPas encore d'évaluation
- Viscometer Guide for Liquid MeasurementDocument18 pagesViscometer Guide for Liquid MeasurementNishat AhmedPas encore d'évaluation
- Operating Systems: Adnan Iqbal Spring 201819 Namal College, MianwaliDocument24 pagesOperating Systems: Adnan Iqbal Spring 201819 Namal College, MianwaliNishat AhmedPas encore d'évaluation
- Real and Apparent Power CalculationsDocument9 pagesReal and Apparent Power CalculationsNishat AhmedPas encore d'évaluation
- Physics Part 2 FSC 2nd Year (Freebooks - PK)Document271 pagesPhysics Part 2 FSC 2nd Year (Freebooks - PK)Nishat AhmedPas encore d'évaluation
- Viscometer Guide for Liquid MeasurementDocument18 pagesViscometer Guide for Liquid MeasurementNishat AhmedPas encore d'évaluation
- Derivation of Wave EquationDocument3 pagesDerivation of Wave EquationNishat AhmedPas encore d'évaluation
- Heat of Neutralization f10Document9 pagesHeat of Neutralization f10Nishat AhmedPas encore d'évaluation
- File FactsDocument32 pagesFile FactsBorominPas encore d'évaluation
- B.voc Interior Design SyllabusDocument37 pagesB.voc Interior Design SyllabusYashmitaPas encore d'évaluation
- Inmo Paper Solution Now Available 2020 PDFDocument6 pagesInmo Paper Solution Now Available 2020 PDFShamim AkhtarPas encore d'évaluation
- Urban Temples: A City Like Mumbai Which Is Known For Lack of Space What Is The Forem of Religion Here?Document9 pagesUrban Temples: A City Like Mumbai Which Is Known For Lack of Space What Is The Forem of Religion Here?R RathiPas encore d'évaluation
- Clothes at Rest: Elements For A Sociology of The Wardrobe Saulo B. CwernerDocument14 pagesClothes at Rest: Elements For A Sociology of The Wardrobe Saulo B. Cwernerroroism50% (2)
- Lecture 5 Cont.: Dimensioning DimensioningDocument58 pagesLecture 5 Cont.: Dimensioning DimensioningANPas encore d'évaluation
- CBSE CLASSXI Kinematics (Assignment) FINALDocument3 pagesCBSE CLASSXI Kinematics (Assignment) FINALg_groupPas encore d'évaluation
- Making Learning: in Museums and LibrariesDocument56 pagesMaking Learning: in Museums and LibrariesYosdi MartínezPas encore d'évaluation
- Assignment On Rigid Body DynamicsDocument9 pagesAssignment On Rigid Body DynamicsKaveesh KulkarniPas encore d'évaluation
- Class - 9 Concise Physics Solutions Chapter-Exercise 2 A: Motion in One DimensionDocument7 pagesClass - 9 Concise Physics Solutions Chapter-Exercise 2 A: Motion in One DimensionNobodyPas encore d'évaluation
- Stress Due To Surface LoadDocument7 pagesStress Due To Surface LoadDesalegn TamirPas encore d'évaluation
- Day 3 - Equilateral and Isosceles TrianglesDocument13 pagesDay 3 - Equilateral and Isosceles Trianglesapi-253195113Pas encore d'évaluation
- Math Coaching1 2ndbooklet (FINAL)Document13 pagesMath Coaching1 2ndbooklet (FINAL)Achilles Aldave100% (5)
- Nathaniel Grossman (Auth.) - The Sheer Joy of Celestial Mechanics-Birkhäuser Basel (1996)Document193 pagesNathaniel Grossman (Auth.) - The Sheer Joy of Celestial Mechanics-Birkhäuser Basel (1996)geovanny0% (1)
- Highway and Railroad Engineering: Compound CurvesDocument9 pagesHighway and Railroad Engineering: Compound CurvesDirect XPas encore d'évaluation
- Math 8 Quiz 3 SolutionsDocument7 pagesMath 8 Quiz 3 SolutionsPam Maglalang SolanoPas encore d'évaluation
- Important Theorems - Real AnalysisDocument9 pagesImportant Theorems - Real Analysismmmellyyyy50% (2)
- Cpp: Parabola Equations and PropertiesDocument3 pagesCpp: Parabola Equations and PropertiesSamridh GuptaPas encore d'évaluation
- ImprovingtheDesignandUseofPublicParksinthePhilippines AproposalDocument8 pagesImprovingtheDesignandUseofPublicParksinthePhilippines AproposalRuellynne Barberan BonifacioPas encore d'évaluation
- Geometry Terms and DefinitionsDocument4 pagesGeometry Terms and DefinitionsGezalla Joenjine GundayPas encore d'évaluation
- Sign Convention ExplainedDocument5 pagesSign Convention ExplainedBunkun15Pas encore d'évaluation
- Isoperimetric InequalityDocument15 pagesIsoperimetric InequalityRodolfoFerrariPas encore d'évaluation
- Measurement & Motion Speed Graph AnalysisDocument5 pagesMeasurement & Motion Speed Graph AnalysisAIRUNIPas encore d'évaluation
- Balancing of Rotating MassesDocument17 pagesBalancing of Rotating MassesEr Sumit SarkalanPas encore d'évaluation
- An Object Is in When Its From Another Object Is Movement Depends On Your Point ofDocument28 pagesAn Object Is in When Its From Another Object Is Movement Depends On Your Point ofWelfredo Jr YuPas encore d'évaluation
- 11th Class PhysicsDocument73 pages11th Class PhysicsRishabh SharmaPas encore d'évaluation
- Canned Goods Math Word ProblemDocument14 pagesCanned Goods Math Word ProblemAriel Mark Pilotin100% (3)
- Mannheim. Brane-Localized Gravit PDFDocument354 pagesMannheim. Brane-Localized Gravit PDFDavid PrietoPas encore d'évaluation
- 7 Maths NCERT Exemplar Chapter 6Document36 pages7 Maths NCERT Exemplar Chapter 6Ramesh rajPas encore d'évaluation
- Practice Test 14-Mathematical AptitudeDocument12 pagesPractice Test 14-Mathematical AptituderajatguptPas encore d'évaluation
- The Grid: The Fraying Wires Between Americans and Our Energy FutureD'EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureÉvaluation : 3.5 sur 5 étoiles3.5/5 (48)
- Renewable Energy: A Very Short IntroductionD'EverandRenewable Energy: A Very Short IntroductionÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormD'EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormÉvaluation : 5 sur 5 étoiles5/5 (5)
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyD'EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyPas encore d'évaluation
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingD'EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingÉvaluation : 4.5 sur 5 étoiles4.5/5 (21)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesD'EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesÉvaluation : 4.5 sur 5 étoiles4.5/5 (21)
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionÉvaluation : 5 sur 5 étoiles5/5 (1)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsD'EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsÉvaluation : 5 sur 5 étoiles5/5 (2)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenD'EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenPas encore d'évaluation
- Shorting the Grid: The Hidden Fragility of Our Electric GridD'EverandShorting the Grid: The Hidden Fragility of Our Electric GridÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Build Your Own Electric Vehicle, Third EditionD'EverandBuild Your Own Electric Vehicle, Third EditionÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusD'EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentD'EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentÉvaluation : 4.5 sur 5 étoiles4.5/5 (21)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathD'EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathÉvaluation : 5 sur 5 étoiles5/5 (1)
- The Way Home: Tales from a life without technologyD'EverandThe Way Home: Tales from a life without technologyÉvaluation : 4 sur 5 étoiles4/5 (45)
- Asset Integrity Management for Offshore and Onshore StructuresD'EverandAsset Integrity Management for Offshore and Onshore StructuresPas encore d'évaluation
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsD'EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsPas encore d'évaluation
- Psychology Behind Mathematics - The Comprehensive GuideD'EverandPsychology Behind Mathematics - The Comprehensive GuidePas encore d'évaluation
- Nuclear Energy in the 21st Century: World Nuclear University PressD'EverandNuclear Energy in the 21st Century: World Nuclear University PressÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Handbook on Battery Energy Storage SystemD'EverandHandbook on Battery Energy Storage SystemÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeD'EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeÉvaluation : 4 sur 5 étoiles4/5 (2)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)D'EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Pas encore d'évaluation
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsD'EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsPas encore d'évaluation
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldD'EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldÉvaluation : 3 sur 5 étoiles3/5 (79)