Vous aimerez peut-être aussi
- SOLUCIONARIO - Tercera Prueba de CátedraDocument12 pagesSOLUCIONARIO - Tercera Prueba de CátedraCR CrPas encore d'évaluation
- SOLUCIONARIO - Recuperativa de Segunda Prueba de CátedraDocument9 pagesSOLUCIONARIO - Recuperativa de Segunda Prueba de CátedraCR CrPas encore d'évaluation
- Solucionario Tercera Prueba Fis 3 Sem Primavera 2005Document3 pagesSolucionario Tercera Prueba Fis 3 Sem Primavera 2005EIEEPas encore d'évaluation
- Guia No 5Document1 pageGuia No 5CR CrPas encore d'évaluation
- Solucionario QUIZ No. 1Document6 pagesSolucionario QUIZ No. 1CR CrPas encore d'évaluation
- SOLUCIONARIO - Primera Prueba de CátedraDocument11 pagesSOLUCIONARIO - Primera Prueba de CátedraCR CrPas encore d'évaluation
- Solucionario ElectromagnetismoDocument7 pagesSolucionario ElectromagnetismoPamelaPas encore d'évaluation
- Guia No 7Document3 pagesGuia No 7CR CrPas encore d'évaluation
- Guia No 8Document4 pagesGuia No 8CR CrPas encore d'évaluation
- QUIZ No. 1Document1 pageQUIZ No. 1CR CrPas encore d'évaluation
- Solucionario Primera Prueba Fisica 3 Sem Prim 2005Document13 pagesSolucionario Primera Prueba Fisica 3 Sem Prim 2005EIEEPas encore d'évaluation
- Solucionario de Prueba No. 1Document10 pagesSolucionario de Prueba No. 1CR CrPas encore d'évaluation
- Solucionario Segunda Prueba Fisica 3 Sem Prim 2005Document9 pagesSolucionario Segunda Prueba Fisica 3 Sem Prim 2005EIEEPas encore d'évaluation
- Solucionario Optativa Semestre PrimaveraDocument3 pagesSolucionario Optativa Semestre PrimaveraCR CrPas encore d'évaluation
- Guía5 EjerciciosDocument3 pagesGuía5 EjerciciosCR CrPas encore d'évaluation
- Guia3 EjerciciosDocument4 pagesGuia3 EjerciciosCR CrPas encore d'évaluation
- Campos EscalaresDocument5 pagesCampos EscalaresCR CrPas encore d'évaluation
- General I Dad EsDocument6 pagesGeneral I Dad EsCR CrPas encore d'évaluation
- Guía4 EjerciciosDocument5 pagesGuía4 EjerciciosCR CrPas encore d'évaluation
- Guia Ejercicios Tercera PruebaDocument4 pagesGuia Ejercicios Tercera PruebaCR CrPas encore d'évaluation
- Guia Completa de Trazado de CurvasDocument3 pagesGuia Completa de Trazado de CurvasCR Cr100% (1)
- Guia Ejercicios Tercera PruebaDocument4 pagesGuia Ejercicios Tercera PruebaCR CrPas encore d'évaluation
- Guia4 EjerciciosDocument5 pagesGuia4 EjerciciosCR CrPas encore d'évaluation
- Guia No 5Document1 pageGuia No 5CR CrPas encore d'évaluation
- Guía1 EjerciciosDocument7 pagesGuía1 EjerciciosCR CrPas encore d'évaluation
- Conjuntos Abiertos en IRnDocument2 pagesConjuntos Abiertos en IRnCR CrPas encore d'évaluation
- Funciones VectorialesDocument31 pagesFunciones VectorialesOscar Ruiz92% (12)
- 02 - Conjuntos y Puntos de IRn (Apuntes-Ejercicios)Document7 pages02 - Conjuntos y Puntos de IRn (Apuntes-Ejercicios)CR Cr100% (1)
- Guía2 EjercicosDocument5 pagesGuía2 EjercicosCR CrPas encore d'évaluation
- 03 - Funciones Vectoriales de Una Variables Real (Apuntes-Ejercicios)Document15 pages03 - Funciones Vectoriales de Una Variables Real (Apuntes-Ejercicios)CR CrPas encore d'évaluation
- 1 Describa El Dominio Natural de La FunciónDocument5 pages1 Describa El Dominio Natural de La Funciónshirley1617Pas encore d'évaluation
- Cargas Distribuidas en Cable2Document18 pagesCargas Distribuidas en Cable2joseph chavezPas encore d'évaluation
- Taller Algebra Lineal EncriptadoDocument2 pagesTaller Algebra Lineal EncriptadoMiguel PeñaPas encore d'évaluation
- Taller 3 Determinantes PASCUALDocument5 pagesTaller 3 Determinantes PASCUALJuan David Florez CardonaPas encore d'évaluation
- Me351bin2022 1Document7 pagesMe351bin2022 1Cristian Diego RodriguezPas encore d'évaluation
- Derivadas parciales de funciones de varias variablesDocument265 pagesDerivadas parciales de funciones de varias variablesHenry RodriguezbPas encore d'évaluation
- 3P Mat 103Document57 pages3P Mat 103hinata hajimePas encore d'évaluation
- Mapa Conceptual MatematicaDocument1 pageMapa Conceptual Matematica1Pas encore d'évaluation
- Modulo Elementos Matematicos OLGUITADocument240 pagesModulo Elementos Matematicos OLGUITABörys PalmaPas encore d'évaluation
- La Recta TangenteDocument5 pagesLa Recta TangenteJulio Hernán Alfonso HuertasPas encore d'évaluation
- Trabajo de Matematica IIIDocument28 pagesTrabajo de Matematica IIIdanny fuPas encore d'évaluation
- 9º Taller 2 - Método de Reducción PDFDocument2 pages9º Taller 2 - Método de Reducción PDFAlfonso GutierrezPas encore d'évaluation
- FÍSICADocument18 pagesFÍSICALatex666Pas encore d'évaluation
- Matrices, vectores y determinantesDocument22 pagesMatrices, vectores y determinantesJavier Eduardo Murcia PiedrasPas encore d'évaluation
- Clase 3 PolinomiosDocument12 pagesClase 3 PolinomiosdaniPas encore d'évaluation
- Ecuaciones SimultáneasDocument16 pagesEcuaciones SimultáneasMartin Andre AlburquequePas encore d'évaluation
- Sesion 6.derivadas AlgebraicasDocument11 pagesSesion 6.derivadas AlgebraicasDr. Daniel ArizmendiPas encore d'évaluation
- Diagnóstico Con Solucionario Matematica IV° PDFDocument21 pagesDiagnóstico Con Solucionario Matematica IV° PDFAle OliveraPas encore d'évaluation
- C9-Integración y DiferenciaciónDocument29 pagesC9-Integración y DiferenciaciónBmanPas encore d'évaluation
- Ejercicios Sobre Variedades DiferenciablesDocument8 pagesEjercicios Sobre Variedades DiferenciablesrpY0Pas encore d'évaluation
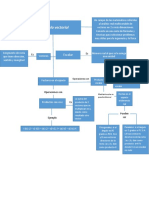
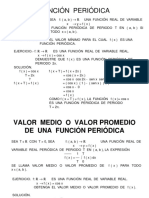
- Función Periódica, Valores Medio y Eficaz de Un MasDocument10 pagesFunción Periódica, Valores Medio y Eficaz de Un MasDaniel FarruzPas encore d'évaluation
- 200 años de independencia del Perú: Teoremas integrales claveDocument8 pages200 años de independencia del Perú: Teoremas integrales claveMishell Ines Pucuhuayla CollachaguaPas encore d'évaluation
- Metodos NumericosDocument22 pagesMetodos NumericosWinifer HcoPas encore d'évaluation
- Introducción a la Física: Sistemas vectorialesDocument71 pagesIntroducción a la Física: Sistemas vectorialesFredyx HernándezPas encore d'évaluation
- Segunda Practica de Algebra Lineal FIIS UNIDocument12 pagesSegunda Practica de Algebra Lineal FIIS UNIMoisés Carhuaricra CamPas encore d'évaluation
- 2019-00053-GeometriaVectorial S1 MF1Document18 pages2019-00053-GeometriaVectorial S1 MF1solucionesacademicas mapiPas encore d'évaluation
- Alg - Lin.examen Final Resuelto 2015-A PDFDocument3 pagesAlg - Lin.examen Final Resuelto 2015-A PDFNolanJaraJaraPas encore d'évaluation
- Geometría analítica y problemas de geometríaDocument16 pagesGeometría analítica y problemas de geometríaFelipe GallegosPas encore d'évaluation
- Maraton SolucionesDocument16 pagesMaraton Solucionesheider manuelPas encore d'évaluation
- ALGEBRADocument34 pagesALGEBRAHender Iker Llauce ChapoñanPas encore d'évaluation