Vous aimerez peut-être aussi
- Robot Manipulators: Modeling, Performance Analysis and ControlD'EverandRobot Manipulators: Modeling, Performance Analysis and ControlPas encore d'évaluation
- Pergamon: Design For Manufacturing The Elastic Pivots With Special Reference To Manufacturing ErrorDocument16 pagesPergamon: Design For Manufacturing The Elastic Pivots With Special Reference To Manufacturing ErrorCrystal KingPas encore d'évaluation
- The Effects of The Generating Pin Size and Placement On The Curvature A N D Displacement of Epitrochoidal Gerotors E. BeardtDocument17 pagesThe Effects of The Generating Pin Size and Placement On The Curvature A N D Displacement of Epitrochoidal Gerotors E. BeardtEbru AnaPas encore d'évaluation
- Shape Separation of Particulates by A Rotating HorDocument7 pagesShape Separation of Particulates by A Rotating Horبلال بن عميرهPas encore d'évaluation
- Trajectories of Flat Plates in Uniform Flow With Application To Wind-Generated MissilesDocument11 pagesTrajectories of Flat Plates in Uniform Flow With Application To Wind-Generated MissilesVagelis AsimomytisPas encore d'évaluation
- Shell Strength of Conveyor Belt Pulleys - Theory and DesignDocument13 pagesShell Strength of Conveyor Belt Pulleys - Theory and DesignWilfredo BullonPas encore d'évaluation
- Aerodynamic Aspects of The Sealing of Gas-Turbine Rotor-Stator SystemsDocument5 pagesAerodynamic Aspects of The Sealing of Gas-Turbine Rotor-Stator SystemsahmadalsaiahPas encore d'évaluation
- Geometric Properties of Schifflerized An PDFDocument13 pagesGeometric Properties of Schifflerized An PDFZaher SharafPas encore d'évaluation
- ComputerAidedGraphicsofInvoluteGearToothProfile PDFDocument22 pagesComputerAidedGraphicsofInvoluteGearToothProfile PDFHassan AlaaPas encore d'évaluation
- Computer Aided Graphics of Involute Gear Tooth Profile: University of Baghdad Engineering Journal March 1999Document22 pagesComputer Aided Graphics of Involute Gear Tooth Profile: University of Baghdad Engineering Journal March 1999Hassan AlaaPas encore d'évaluation
- 1 s2.0 0020740373900490 MainDocument19 pages1 s2.0 0020740373900490 MaindakshPas encore d'évaluation
- A Study of The Static Stiffness of Machine Tool SpindlesDocument18 pagesA Study of The Static Stiffness of Machine Tool SpindlesnounakameliaPas encore d'évaluation
- Theory of Machines I 14 Dec. 2013Document3 pagesTheory of Machines I 14 Dec. 2013Rohit GaratePas encore d'évaluation
- Analysis of Flow Through Roots Blower Systems PDFDocument8 pagesAnalysis of Flow Through Roots Blower Systems PDFSugianto BarusPas encore d'évaluation
- (Received January in Revised Form May: WhitfieldDocument8 pages(Received January in Revised Form May: WhitfieldrezaPas encore d'évaluation
- Baker 1983Document12 pagesBaker 1983WILLIAM OMAR SANCHEZ GARZONPas encore d'évaluation
- Spread Calculation of Rod RollingDocument6 pagesSpread Calculation of Rod RollingSubrata ChakrabortyPas encore d'évaluation
- BF 00814949Document5 pagesBF 00814949Jacob SmithPas encore d'évaluation
- Determination of The Winding Inductances of A Two-Phase MachineDocument7 pagesDetermination of The Winding Inductances of A Two-Phase MachineIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalPas encore d'évaluation
- Vibration ProjectDocument11 pagesVibration ProjectEileen WongPas encore d'évaluation
- Effects of Lifter Bars On The Motion of En-Masse Grinding Media in MillingDocument17 pagesEffects of Lifter Bars On The Motion of En-Masse Grinding Media in MillingRodger OlynPas encore d'évaluation
- Formation of Roll Contact in Four-High Mill Stand: R o L L I N GDocument7 pagesFormation of Roll Contact in Four-High Mill Stand: R o L L I N GAli VarmazyarPas encore d'évaluation
- Of Si': Gear Noise and The Making Ent GearsDocument8 pagesOf Si': Gear Noise and The Making Ent Gearstalhak93Pas encore d'évaluation
- Singh 1982Document7 pagesSingh 1982ahmeterenbacakPas encore d'évaluation
- The “ Shoulderproblem” of Forming, Filling and Closing Machines For PouchesDocument13 pagesThe “ Shoulderproblem” of Forming, Filling and Closing Machines For PouchesMiguel MotaPas encore d'évaluation
- 1972 - THE SHOULDERPROBLEM OF FORMING. FILLING AND CLOSING MACHINES FOR POUCHES - MotDocument13 pages1972 - THE SHOULDERPROBLEM OF FORMING. FILLING AND CLOSING MACHINES FOR POUCHES - MotJones GarciaPas encore d'évaluation
- Christoforou1998 PDFDocument15 pagesChristoforou1998 PDFAlex BrandãoPas encore d'évaluation
- Ece Labmanual With VivaDocument58 pagesEce Labmanual With VivasathwikPas encore d'évaluation
- Torque Production in Permanent-MagnetDocument6 pagesTorque Production in Permanent-MagnetTien Dung TranPas encore d'évaluation
- Torsion of Bars Apparatus (A)Document4 pagesTorsion of Bars Apparatus (A)Ram NiwasPas encore d'évaluation
- ENCI 317 - Lab 2 Material - Fall 2022Document17 pagesENCI 317 - Lab 2 Material - Fall 2022Sherry YousafPas encore d'évaluation
- Apr May 2019Document6 pagesApr May 2019VenkadeshPas encore d'évaluation
- Belli 2004Document6 pagesBelli 2004rosarioiovino23Pas encore d'évaluation
- Bending of Beams ReportDocument17 pagesBending of Beams ReportmubzPas encore d'évaluation
- Forward and Backward Whirling of A Rotor With Gyroscopic EffectDocument10 pagesForward and Backward Whirling of A Rotor With Gyroscopic EffectkennedyfernandoPas encore d'évaluation
- 5542-Article Text PDF-9300-1-10-20130718Document21 pages5542-Article Text PDF-9300-1-10-20130718zeinabPas encore d'évaluation
- Article About Cam DesignDocument3 pagesArticle About Cam DesignHansPas encore d'évaluation
- Characterization of Evaporated Amorphous WO3 Films by Raman and FTIR Spectroscopies 1988 Applied Surface ScienceDocument8 pagesCharacterization of Evaporated Amorphous WO3 Films by Raman and FTIR Spectroscopies 1988 Applied Surface ScienceShameekaPas encore d'évaluation
- Strain and Statick HoldDocument6 pagesStrain and Statick HoldJohn DoePas encore d'évaluation
- Fatigue Failures of Welded Conveyor DrumsDocument11 pagesFatigue Failures of Welded Conveyor DrumsWashington MoraisPas encore d'évaluation
- Report TorsionDocument17 pagesReport TorsionAhmad Haziq DanialPas encore d'évaluation
- Torsion Report PDFDocument31 pagesTorsion Report PDFKalKatu MaLam100% (22)
- The Combined Ring Rolling Process and The Stiffness ConditionDocument6 pagesThe Combined Ring Rolling Process and The Stiffness ConditionJackson PhinniPas encore d'évaluation
- Bayoumi 2004Document7 pagesBayoumi 2004david.fuffaPas encore d'évaluation
- Perpmen: Mech. Math. Them' . Vol. 29, No. 5, Pp. 673-689. 1994Document17 pagesPerpmen: Mech. Math. Them' . Vol. 29, No. 5, Pp. 673-689. 1994Ebru AnaPas encore d'évaluation
- Design Area Exam - Fall 2020 Name - Problem 1Document4 pagesDesign Area Exam - Fall 2020 Name - Problem 1PriyadarshanSinghPas encore d'évaluation
- Torsion of Crankshafts: Imoshenko Hiladelphia ADocument15 pagesTorsion of Crankshafts: Imoshenko Hiladelphia ALahiru Prabhatha AmarasenaPas encore d'évaluation
- An Energy Approach For Predicting Springback of Metal Sheets After Double-Curvature Forming, Part I: Axisymmetric StampingDocument22 pagesAn Energy Approach For Predicting Springback of Metal Sheets After Double-Curvature Forming, Part I: Axisymmetric Stampingsani_buangPas encore d'évaluation
- Finite Element Analysis of Natural Whirl Speeds of Rotating ShaftsDocument7 pagesFinite Element Analysis of Natural Whirl Speeds of Rotating ShaftsmanojPas encore d'évaluation
- TorsionDocument12 pagesTorsionredz00Pas encore d'évaluation
- Formulae and Graphs of Elastic Stresses For Design A N D Analysis of U - S H A P E D BellowsDocument17 pagesFormulae and Graphs of Elastic Stresses For Design A N D Analysis of U - S H A P E D Bellowssagar1503Pas encore d'évaluation
- Mathematical Model For Cold Rolling and Temper Rolling Process of Thin Steel StripDocument7 pagesMathematical Model For Cold Rolling and Temper Rolling Process of Thin Steel StripRhushikeshPas encore d'évaluation
- An Approximate Model For Predicting Roll Force in Rod RollingDocument11 pagesAn Approximate Model For Predicting Roll Force in Rod RollingmanolojethroPas encore d'évaluation
- Experiment 7 Physics BtechDocument5 pagesExperiment 7 Physics BtechSaksham BargujarPas encore d'évaluation
- Axial 02Document9 pagesAxial 02mabrur007Pas encore d'évaluation
- Calculation of Rotor Interference in Screw CompressorsDocument8 pagesCalculation of Rotor Interference in Screw Compressorszikhail93Pas encore d'évaluation
- Design and Development of An Octagonal Strain Ring Based Load Cell - 2Document16 pagesDesign and Development of An Octagonal Strain Ring Based Load Cell - 2Arunava ChoudhuryPas encore d'évaluation
- 1WCE2009 pp435-440Document6 pages1WCE2009 pp435-440Noureddine BounaslaPas encore d'évaluation
- Buckling of Rings in Column-Supported Bins and Tanks - JG Teng & JM Rotter, 1989Document24 pagesBuckling of Rings in Column-Supported Bins and Tanks - JG Teng & JM Rotter, 1989Benjamin IndrawanPas encore d'évaluation
- Objective: M U DX EIDocument10 pagesObjective: M U DX EIAsh DenemPas encore d'évaluation
- Types of HVAC SystemsDocument18 pagesTypes of HVAC SystemsIsrael raju2003Pas encore d'évaluation
- Airconditioning: Ventilation in Buildings Types of Fans Types of Air ConditionersDocument51 pagesAirconditioning: Ventilation in Buildings Types of Fans Types of Air ConditionersSassyPas encore d'évaluation
- Types of Airconditioning UnitDocument1 pageTypes of Airconditioning UnitSassyPas encore d'évaluation
- LESSON 1: Principles of Food Processing TOPIC 1:salting, Curing and SmokingDocument42 pagesLESSON 1: Principles of Food Processing TOPIC 1:salting, Curing and SmokingSassy100% (1)
- Customized Grooving PDFDocument1 pageCustomized Grooving PDFSassyPas encore d'évaluation
- Elements Machine Shop PDFDocument493 pagesElements Machine Shop PDFJaypes ManzanoPas encore d'évaluation
- Student Ojt Presentation of Experiences and OthersDocument45 pagesStudent Ojt Presentation of Experiences and OthersSassyPas encore d'évaluation
- Bend Radius Bend Angle: Bending Is A Metal Forming Process in Which A Force Is Applied To A Piece of Sheet MetalDocument8 pagesBend Radius Bend Angle: Bending Is A Metal Forming Process in Which A Force Is Applied To A Piece of Sheet MetalSassyPas encore d'évaluation
- Metal RollingDocument14 pagesMetal RollingSassyPas encore d'évaluation
- Format of Narrative ReportDocument3 pagesFormat of Narrative ReportSassyPas encore d'évaluation
- Sample Weekly Activity ReportsDocument6 pagesSample Weekly Activity ReportsShaun KerouacPas encore d'évaluation
- Sample Weekly Activity ReportsDocument6 pagesSample Weekly Activity ReportsShaun KerouacPas encore d'évaluation
- Sample Weekly Activity ReportsDocument6 pagesSample Weekly Activity ReportsShaun KerouacPas encore d'évaluation
- Sample Weekly Activity ReportsDocument6 pagesSample Weekly Activity ReportsShaun KerouacPas encore d'évaluation
- Air Cycle Refrigeration Systems (Indian Institute of Technology Kharagpur)Document15 pagesAir Cycle Refrigeration Systems (Indian Institute of Technology Kharagpur)emawz21Pas encore d'évaluation
- Coefoffiction 96 S68 PDFDocument8 pagesCoefoffiction 96 S68 PDFAly Arquillano JrPas encore d'évaluation
- Metal RollingDocument8 pagesMetal Rollingklawsis100% (2)
- Bend Radius Bend Angle: Bending Is A Metal Forming Process in Which A Force Is Applied To A Piece of Sheet MetalDocument8 pagesBend Radius Bend Angle: Bending Is A Metal Forming Process in Which A Force Is Applied To A Piece of Sheet MetalSassyPas encore d'évaluation
- Hydrolic Pipe Bending MachineDocument59 pagesHydrolic Pipe Bending MachineNilesh Maheshwari67% (3)
- Modeling and Computation of The Three-Roller BendingDocument7 pagesModeling and Computation of The Three-Roller BendingSassyPas encore d'évaluation
- De Cuong On Thi HK2 Tieng Anh 10Document5 pagesDe Cuong On Thi HK2 Tieng Anh 10hoangtouri2512Pas encore d'évaluation
- Urban Problems and SolutionsDocument12 pagesUrban Problems and SolutionsJohn Lloyd Agapito50% (2)
- OffGrid enDocument36 pagesOffGrid enYordan StoyanovPas encore d'évaluation
- HP RT3000 G2 Toronto UPS SpecsDocument13 pagesHP RT3000 G2 Toronto UPS SpecsJokBalingitPas encore d'évaluation
- Ballsim DirectDocument58 pagesBallsim DirectDiego GaliciaPas encore d'évaluation
- JRX118SP SpecsheetDocument2 pagesJRX118SP SpecsheetLuisPas encore d'évaluation
- Srinivasa Ramanujan Institute of TechnologyDocument2 pagesSrinivasa Ramanujan Institute of TechnologyPandu RangareddyPas encore d'évaluation
- List of BooksDocument13 pagesList of Booksbharan16Pas encore d'évaluation
- Chapter 4Document27 pagesChapter 4Zeeshan Ali100% (1)
- Bridge Erection MachinesDocument73 pagesBridge Erection Machinesstavros_sterg80% (5)
- Laws of ThermoDocument13 pagesLaws of ThermofabyunaaaPas encore d'évaluation
- UT Dallas Syllabus For Math3303.501.10f Taught by Phillip Kisunzu (pxk091000)Document7 pagesUT Dallas Syllabus For Math3303.501.10f Taught by Phillip Kisunzu (pxk091000)UT Dallas Provost's Technology GroupPas encore d'évaluation
- Oracle CRM On DemandDocument2 pagesOracle CRM On Demandajazahmednet3946Pas encore d'évaluation
- Soft Sculpture EventsDocument28 pagesSoft Sculpture EventsAlabala BalaaPas encore d'évaluation
- Michael J. Flynn - Some Computer Organizations and Their Effectiveness, 1972Document13 pagesMichael J. Flynn - Some Computer Organizations and Their Effectiveness, 1972earthcrosserPas encore d'évaluation
- Bantilan Maureen Lhee RDocument8 pagesBantilan Maureen Lhee RAlexa Anne Louise BercillaPas encore d'évaluation
- Binary Arithmetic Operations: Prof. R.Ezhilarasie Assistant Professor School of Computing SASTRA Deemed To Be UniversityDocument26 pagesBinary Arithmetic Operations: Prof. R.Ezhilarasie Assistant Professor School of Computing SASTRA Deemed To Be UniversityEzhil RamanathanPas encore d'évaluation
- The Complete MARILLION Discography V2 PDFDocument13 pagesThe Complete MARILLION Discography V2 PDFtotalmenteprovisorioPas encore d'évaluation
- Elasticity and Damping of Avm-2055 Rubber Mounting Pads: Theoretical Determination and Experimental VerificationDocument7 pagesElasticity and Damping of Avm-2055 Rubber Mounting Pads: Theoretical Determination and Experimental VerificationAnanya MishraPas encore d'évaluation
- 027 03 Dec13 CseDocument647 pages027 03 Dec13 CseParth NagarPas encore d'évaluation
- ECM 206 Site VisitDocument36 pagesECM 206 Site VisitAZUAN BIN AHMAD FAUZI100% (2)
- NC1 AC Contactor, 9 95A: Contactors ContactorsDocument2 pagesNC1 AC Contactor, 9 95A: Contactors ContactorsYamendra GurungPas encore d'évaluation
- Laboratorios RoeDocument11 pagesLaboratorios RoeVioleta CubaPas encore d'évaluation
- Hw1 2 SolutionsDocument7 pagesHw1 2 SolutionsFrancisco AlvesPas encore d'évaluation
- Thing in Itself Kantian: AnstoßDocument1 pageThing in Itself Kantian: Anstoßwhynotbequiet23Pas encore d'évaluation
- Introduction To Graph-Theoryv2Document92 pagesIntroduction To Graph-Theoryv2sheela lPas encore d'évaluation
- 1xEV RF Optimization Guidelines R24Document83 pages1xEV RF Optimization Guidelines R24lady_sPas encore d'évaluation
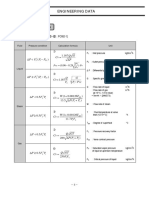
- Engineering Data: 2. CV CalculationDocument1 pageEngineering Data: 2. CV Calculationdj22500Pas encore d'évaluation
- Aga Report #10-03Document177 pagesAga Report #10-03paolita788Pas encore d'évaluation