Vous aimerez peut-être aussi
- Sistemas de control en tiempo continuo y discretoD'EverandSistemas de control en tiempo continuo y discretoÉvaluation : 4 sur 5 étoiles4/5 (2)
- El Ministerio de La OraciónDocument41 pagesEl Ministerio de La OraciónAbraham Solis100% (1)
- Cimentaciones en Suelos Expansibles y Colapsables - InformeDocument52 pagesCimentaciones en Suelos Expansibles y Colapsables - InformeEadwine EdPas encore d'évaluation
- Animación Bíblica de La PastoralDocument3 pagesAnimación Bíblica de La PastoralrafavagoPas encore d'évaluation
- Tarea 4 Grupo 7 ElectronicaDocument34 pagesTarea 4 Grupo 7 ElectronicaKaren RoaPas encore d'évaluation
- Sumar Columna de Datagridview en Visual Basic NetDocument10 pagesSumar Columna de Datagridview en Visual Basic NetBladdy AgüeroPas encore d'évaluation
- Tarea1 Control AnalogoDocument9 pagesTarea1 Control Analogoangel vasquezPas encore d'évaluation
- Fase 2 ConsolidadoDocument30 pagesFase 2 ConsolidadoJuan Carlos Huertas100% (1)
- Mecatrónica: modelado, simulación y control de sistemas físicosD'EverandMecatrónica: modelado, simulación y control de sistemas físicosPas encore d'évaluation
- Grupo - 45 - Fase - 2 - Fernando Osorio - IndividualDocument9 pagesGrupo - 45 - Fase - 2 - Fernando Osorio - IndividualJheffry Andres Ortega Rojas100% (1)
- Implementación de Adecuaciones Curriculares Según Decreto 83Document60 pagesImplementación de Adecuaciones Curriculares Según Decreto 83margotita7100% (1)
- Fase - 2 - Analisis de CircuitosDocument16 pagesFase - 2 - Analisis de CircuitosBrayam Martínez PerdomoPas encore d'évaluation
- Grupo23 - Fase 1 - Aldair - Polo - 1096221528Document10 pagesGrupo23 - Fase 1 - Aldair - Polo - 1096221528David PoloPas encore d'évaluation
- Fase - 2 - Modelado - de - Sistemas - Dinámicos - 243005 - 73 IndividualDocument5 pagesFase - 2 - Modelado - de - Sistemas - Dinámicos - 243005 - 73 IndividualFabian100% (1)
- Etapa 2 - Grupo 17 - Edinson NuñezDocument20 pagesEtapa 2 - Grupo 17 - Edinson Nuñezedinson nunezPas encore d'évaluation
- Componente PracticoDocument6 pagesComponente PracticoRonaldo GarziaPas encore d'évaluation
- Clasificación de La PsicoterapiaDocument28 pagesClasificación de La PsicoterapiaCM100% (2)
- E1 Grupo 243005 32Document30 pagesE1 Grupo 243005 32carlos mancillaPas encore d'évaluation
- Tarea 1-John - 2030 - 25Document10 pagesTarea 1-John - 2030 - 25john alexander rios hernandezPas encore d'évaluation
- Trabajo Colaborativo Unidad 3Document6 pagesTrabajo Colaborativo Unidad 3SoteloAndresPas encore d'évaluation
- Guia de Actividades Etapa 3 Analizar Comportamiento Transitorio y Estacionario de Sistemas en Dominio de La FrecuenciaDocument9 pagesGuia de Actividades Etapa 3 Analizar Comportamiento Transitorio y Estacionario de Sistemas en Dominio de La FrecuenciaWurgensen Mauricio Quintero GalvisPas encore d'évaluation
- 203041A 764 Fase2 "Consolidado"Document17 pages203041A 764 Fase2 "Consolidado"Esneyder QuevedoPas encore d'évaluation
- TAREA 1 - Cristian Camilo Contreras DiazDocument10 pagesTAREA 1 - Cristian Camilo Contreras Diazcristian camilo contreras diazPas encore d'évaluation
- Fase 2 Electronica de Potencia Aporte 1Document9 pagesFase 2 Electronica de Potencia Aporte 1anaPas encore d'évaluation
- Syllabus Del Curso Teoría Electromagnética y Ondas UnadDocument10 pagesSyllabus Del Curso Teoría Electromagnética y Ondas UnadFabian ArizaPas encore d'évaluation
- Anexo 1 Ejercicios Tarea 1Document5 pagesAnexo 1 Ejercicios Tarea 1ferneychavitaPas encore d'évaluation
- Mente FactoDocument1 pageMente FactoTanhy Jr100% (1)
- Estudiante - 3 - Fase 1 - Presentar Solución Al Problema Del Circuito Con Diodos y Transistores BipolaresDocument10 pagesEstudiante - 3 - Fase 1 - Presentar Solución Al Problema Del Circuito Con Diodos y Transistores BipolaresGuillermo VasquezPas encore d'évaluation
- Pre Tarea Karen VillamilDocument10 pagesPre Tarea Karen VillamilKaren VillamilPas encore d'évaluation
- Fase 1 - Presentar Solución Al Problema Del Interruptor CrepuscularDocument9 pagesFase 1 - Presentar Solución Al Problema Del Interruptor CrepuscularOsCaRCoNdEe100% (2)
- Tarea 2 - Ronald - GarzonDocument7 pagesTarea 2 - Ronald - GarzonRonal Enrique Garzon SanchezPas encore d'évaluation
- Acondicionarseñales Grupo 39Document17 pagesAcondicionarseñales Grupo 39JAVIER RODRIGUEZ SALAMANCAPas encore d'évaluation
- Etapa2 - Haiber Dussán - 16Document11 pagesEtapa2 - Haiber Dussán - 16anys1676Pas encore d'évaluation
- Fase 1Document4 pagesFase 1Paola TabaresPas encore d'évaluation
- Practica Laboratorio 1 Electronica AnalogaDocument15 pagesPractica Laboratorio 1 Electronica AnalogaJuan Fernando Castrillon RuizPas encore d'évaluation
- Paso 3 Diseño de Circuitos CombinacionalesDocument26 pagesPaso 3 Diseño de Circuitos CombinacionalesJuan Carlos VillanuevaPas encore d'évaluation
- Aporte - Hernando - López - Fase 2Document7 pagesAporte - Hernando - López - Fase 2javierone xporPas encore d'évaluation
- Etapa 2Document9 pagesEtapa 2Wurgensen Mauricio Quintero GalvisPas encore d'évaluation
- Unidad 2 - Biestables - ResumenDocument30 pagesUnidad 2 - Biestables - Resumennicolas franco CarrizoPas encore d'évaluation
- Control Digital Fase 0-J.martinezDocument4 pagesControl Digital Fase 0-J.martinezGeorgeMarrines100% (1)
- Etapa1 - Haiber Dussán - 16Document11 pagesEtapa1 - Haiber Dussán - 16anys1676Pas encore d'évaluation
- Electronica de PotenciaDocument15 pagesElectronica de PotenciaAndres GarzonPas encore d'évaluation
- Ttarea3 Grupo24Document22 pagesTtarea3 Grupo24Carlos Eduardo Rengifo AvilaPas encore d'évaluation
- Fase 1Document7 pagesFase 1FERNANDOPas encore d'évaluation
- Análisis de Circuito Fase 4Document14 pagesAnálisis de Circuito Fase 4Elvis RussoPas encore d'évaluation
- Unidad 3 - Etapa 4 - Grupo 63Document31 pagesUnidad 3 - Etapa 4 - Grupo 63Jairo HurtatisPas encore d'évaluation
- 299006-Syllabus Control DigitalDocument8 pages299006-Syllabus Control DigitalDavid Aguilar LlanosPas encore d'évaluation
- Cristian Diaz ExperimentacionDocument7 pagesCristian Diaz ExperimentacionCristian DiazPas encore d'évaluation
- Fase 1Document14 pagesFase 1ingrid viviana beltran seguraPas encore d'évaluation
- Unidad1 Paso3 Jeinson Hernandez 203037-15Document14 pagesUnidad1 Paso3 Jeinson Hernandez 203037-15Bayron Prada Guerrero100% (1)
- Unidad2 Jhonathan SernaDocument17 pagesUnidad2 Jhonathan SernaJhonatan Serna100% (1)
- Paso1 - Juan Carlos Galindo.Document6 pagesPaso1 - Juan Carlos Galindo.Juan Carlos Galindo GomezPas encore d'évaluation
- Lab1 MicrosDocument10 pagesLab1 Microsanon_687101132Pas encore d'évaluation
- Fase 1 Luis Torres-Grupo 203041 31Document7 pagesFase 1 Luis Torres-Grupo 203041 31Diana Muñoz CPas encore d'évaluation
- Etapa de Potencia y FiltradoDocument23 pagesEtapa de Potencia y FiltradoJheider Quintero100% (3)
- UntitledDocument22 pagesUntitleddavid giraldo lopezPas encore d'évaluation
- Tarea 1 Fisica Moderna Estudiante 5Document9 pagesTarea 1 Fisica Moderna Estudiante 5DiegoPas encore d'évaluation
- Aporte 1 Wilson DarioDocument7 pagesAporte 1 Wilson DarioJairo HurtatisPas encore d'évaluation
- Tarea2 Grupo 76Document14 pagesTarea2 Grupo 76Cristian RuizPas encore d'évaluation
- Edier Oliveros Tarea 1Document7 pagesEdier Oliveros Tarea 1Valieth SanchezPas encore d'évaluation
- Paso 4 - Gustavo Henao - Fir HammingDocument7 pagesPaso 4 - Gustavo Henao - Fir HamminggustavohenaoPas encore d'évaluation
- Tarea 2 Cristian JaimeDocument3 pagesTarea 2 Cristian JaimeAnDy Kof0% (1)
- Syllabus Del Curso Control Analogo PDFDocument12 pagesSyllabus Del Curso Control Analogo PDFJosé AedoPas encore d'évaluation
- Syllabus Del Curso Control AnalogoDocument13 pagesSyllabus Del Curso Control AnalogoDayling JimenezPas encore d'évaluation
- Syllabus Del Curso Control AnalogicoDocument13 pagesSyllabus Del Curso Control AnalogicoWilfer VelezPas encore d'évaluation
- Tarea 0 CONTROL ANALOGODocument5 pagesTarea 0 CONTROL ANALOGOCamylytho GonzalezPas encore d'évaluation
- Guía de Actividades y Rúbrica de Evaluación - Fase 4 - Implementar Controlador en Un MicrocontroladorDocument8 pagesGuía de Actividades y Rúbrica de Evaluación - Fase 4 - Implementar Controlador en Un MicrocontroladorARMAN84Pas encore d'évaluation
- Elaboración Infografía Cuadro ComparativoDocument6 pagesElaboración Infografía Cuadro ComparativoARMAN84Pas encore d'évaluation
- Actividad Individual InfografíaDocument2 pagesActividad Individual InfografíaARMAN84Pas encore d'évaluation
- Elaboración Infografía 1Document9 pagesElaboración Infografía 1ARMAN84Pas encore d'évaluation
- Guía de Actividades y Rúbrica de Evaluacion - Unidad 2Document8 pagesGuía de Actividades y Rúbrica de Evaluacion - Unidad 2ARMAN84Pas encore d'évaluation
- Formato Creación CIPAS VirtualDocument2 pagesFormato Creación CIPAS VirtualARMAN84Pas encore d'évaluation
- !!!prueba de Habilidades Ccna Ii-2020Document25 pages!!!prueba de Habilidades Ccna Ii-2020ARMAN84Pas encore d'évaluation
- Presentación Del Curso - Diplomado de Profundización CISCO PDFDocument5 pagesPresentación Del Curso - Diplomado de Profundización CISCO PDFARMAN84Pas encore d'évaluation
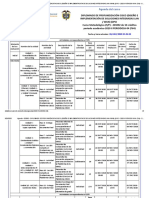
- Agenda - 203092 - DIPLOMADO DE PROFUNDIZACIÓN CISCO (DISEÑO E IMPLEMENTACIÓN DE SOLUCIONES INTEGRADAS LAN - WAN) (OPCI - 2020 II PERIODO16-04 (764) - SII 4.0Document3 pagesAgenda - 203092 - DIPLOMADO DE PROFUNDIZACIÓN CISCO (DISEÑO E IMPLEMENTACIÓN DE SOLUCIONES INTEGRADAS LAN - WAN) (OPCI - 2020 II PERIODO16-04 (764) - SII 4.0ARMAN84Pas encore d'évaluation
- Formato Creación CIPAS VirtualDocument2 pagesFormato Creación CIPAS VirtualARMAN84Pas encore d'évaluation
- Practica 3 SRDocument17 pagesPractica 3 SRDora SanchezPas encore d'évaluation
- PortafolioDocument35 pagesPortafolioivonne3579Pas encore d'évaluation
- FOR-MAP-GTH-09-10 Historia Medica OcupacionalDocument18 pagesFOR-MAP-GTH-09-10 Historia Medica OcupacionalJuan PerezPas encore d'évaluation
- Electro Liner AsDocument84 pagesElectro Liner AsNelson HFPas encore d'évaluation
- Estudios SocialesDocument32 pagesEstudios SocialesCRISTIAN0% (1)
- Caso - Coca ColaDocument7 pagesCaso - Coca ColaDavid Sanchez LeonPas encore d'évaluation
- Presentacion CECATI 100Document23 pagesPresentacion CECATI 100Anna Garcia100% (1)
- Cuestionario de Introduccion Al BibliaDocument6 pagesCuestionario de Introduccion Al BibliaJhonatan Capcha Ponce100% (1)
- Informe Final de Calicata-EstratosDocument54 pagesInforme Final de Calicata-EstratosJoseph Chuquivilca CondorPas encore d'évaluation
- Politicas Economicas - Largo y Corto PlazoDocument58 pagesPoliticas Economicas - Largo y Corto PlazoKristell Reyna Jesús Madueño Carrasco100% (1)
- Ejercicios Estimacion de ParametrosDocument3 pagesEjercicios Estimacion de Parametrosfumerosa2261100% (1)
- 3.S4 HT Relaciones Binarias, Lineal y Cuadratica. Dominio, Rango y Grafica MBING 2017-2Document2 pages3.S4 HT Relaciones Binarias, Lineal y Cuadratica. Dominio, Rango y Grafica MBING 2017-2Cinthia Pamela Rafael Amaya100% (1)
- LFPPCPCIADocument17 pagesLFPPCPCIALic. Luis CaballeroPas encore d'évaluation
- Instalación y Configuración de LDAP en Ubuntu Creando Dominio y Estructura.Document34 pagesInstalación y Configuración de LDAP en Ubuntu Creando Dominio y Estructura.javier_asir2012Pas encore d'évaluation
- EstereoisomeríaDocument5 pagesEstereoisomeríaHenyerson Moreno GPas encore d'évaluation
- Acuerdo Terminacion Lab NuevoDocument2 pagesAcuerdo Terminacion Lab NuevoAdelio Robledo DávalosPas encore d'évaluation
- Actividad Integradora 1, Comunicacion Intrapersonal Primer Periodo, Unidad 1Document6 pagesActividad Integradora 1, Comunicacion Intrapersonal Primer Periodo, Unidad 1Edwin RosaPas encore d'évaluation
- Situación Significativa para La Evaluación Diagnóstica - 3er GradoDocument4 pagesSituación Significativa para La Evaluación Diagnóstica - 3er GradoMary M ChavezPas encore d'évaluation
- Infografia Sobre Aprendizaje Motor - PDF 20231112 171231 0000Document1 pageInfografia Sobre Aprendizaje Motor - PDF 20231112 171231 0000Carolina Rinconez perezPas encore d'évaluation
- Calidad de Servicio y Satisfaccion Del Cliente Del Banco de La Nacion Agencia 2 Huaraz, Periodo 2014 PDFDocument124 pagesCalidad de Servicio y Satisfaccion Del Cliente Del Banco de La Nacion Agencia 2 Huaraz, Periodo 2014 PDFCristianGuerreroAgueroPas encore d'évaluation
- De Música Ligera - Soda Stereo - CIFRA CLUBDocument3 pagesDe Música Ligera - Soda Stereo - CIFRA CLUBMiguel SairePas encore d'évaluation
- Encuestas Con Cédulas BrevesDocument9 pagesEncuestas Con Cédulas BrevesGABRIELA RAMOS HUAMANQUISPEPas encore d'évaluation
- Argentina y El Estilo InternacionalDocument22 pagesArgentina y El Estilo InternacionalMaría CuevasPas encore d'évaluation
- Programa I Concurso Intercolegial de OratoriaDocument2 pagesPrograma I Concurso Intercolegial de OratoriaMauricio BetancourtPas encore d'évaluation