Vous aimerez peut-être aussi
- Valley-Period Dispatched Strategy of Electric Vehicles in Charging StationDocument5 pagesValley-Period Dispatched Strategy of Electric Vehicles in Charging StationAli HussienPas encore d'évaluation
- Smart Grid Congestion Caused by Plug-In Electric Vehicle ChargingDocument5 pagesSmart Grid Congestion Caused by Plug-In Electric Vehicle ChargingHgoglezPas encore d'évaluation
- Analyzing The Impacts of Plug-In Electric Vehicles On Distribution Networks in British ColumbiaDocument6 pagesAnalyzing The Impacts of Plug-In Electric Vehicles On Distribution Networks in British ColumbiasdfsdfPas encore d'évaluation
- 1 s2.0 S0142061522002484 MainDocument15 pages1 s2.0 S0142061522002484 MainfoolloveslifePas encore d'évaluation
- Research Article: An Orderly EV Charging Scheduling Method Based On Deep Learning in Cloud-Edge Collaborative EnvironmentDocument12 pagesResearch Article: An Orderly EV Charging Scheduling Method Based On Deep Learning in Cloud-Edge Collaborative EnvironmentJonas SandströmPas encore d'évaluation
- Spatial and Temporal Model of Electric Vehicle Charging DemandDocument10 pagesSpatial and Temporal Model of Electric Vehicle Charging Demandshahar.dagan2Pas encore d'évaluation
- 24 V Charging For EVDocument10 pages24 V Charging For EVmanimaranPas encore d'évaluation
- Research Article: Resident Plug-In Electric Vehicle Charging Modeling and Scheduling Mechanism in The Smart GridDocument9 pagesResearch Article: Resident Plug-In Electric Vehicle Charging Modeling and Scheduling Mechanism in The Smart GridAmal IdrissiPas encore d'évaluation
- Aggregated Electric Vehicles Load Profiles With Fast Charging StationsDocument7 pagesAggregated Electric Vehicles Load Profiles With Fast Charging StationsDuško TovilovićPas encore d'évaluation
- Active Distribution System Reinforcement Planning With EV Charging Stations-Part I: Uncertainty Modeling and Problem FormulationDocument9 pagesActive Distribution System Reinforcement Planning With EV Charging Stations-Part I: Uncertainty Modeling and Problem Formulationranjit kumarPas encore d'évaluation
- TP (Muhammad Nurazli Bin Mohd Dali 2016690508)Document8 pagesTP (Muhammad Nurazli Bin Mohd Dali 2016690508)azliPas encore d'évaluation
- Mepcon Hassanien2018 AA FinalDocument6 pagesMepcon Hassanien2018 AA FinalasmaaaPas encore d'évaluation
- Applied Energy: Yunfei Mu, Jianzhong Wu, Nick Jenkins, Hongjie Jia, Chengshan WangDocument10 pagesApplied Energy: Yunfei Mu, Jianzhong Wu, Nick Jenkins, Hongjie Jia, Chengshan WangIsrael JosuePas encore d'évaluation
- 电动汽车充电站负荷建模方法 杨少兵Document6 pages电动汽车充电站负荷建模方法 杨少兵謝旻翰Pas encore d'évaluation
- Multistage Time-Variant EV Load Modelling For Capturing EV BehaviourDocument12 pagesMultistage Time-Variant EV Load Modelling For Capturing EV BehaviourAndresPas encore d'évaluation
- Forecast of Electric Vehicle Charging Demand Based On Traffic Flow Model and Optimal Path PlanningDocument6 pagesForecast of Electric Vehicle Charging Demand Based On Traffic Flow Model and Optimal Path PlanningIvan Sanchez LoorPas encore d'évaluation
- Energy: Chuanshen Wu, Sufan Jiang, Shan Gao, Yu Liu, Haiteng HanDocument9 pagesEnergy: Chuanshen Wu, Sufan Jiang, Shan Gao, Yu Liu, Haiteng Hanlawrencesoon86Pas encore d'évaluation
- A Novel Approach For The Layout of Electric Vehicle Charging StationDocument7 pagesA Novel Approach For The Layout of Electric Vehicle Charging Stationabhinandan.kumarPas encore d'évaluation
- Spatial and Temporal Model For Electric Vehicle Rapid Charging DemandDocument5 pagesSpatial and Temporal Model For Electric Vehicle Rapid Charging Demandanup chauhanPas encore d'évaluation
- Planning of Fast EV Charging Stations On A Round FreewayDocument10 pagesPlanning of Fast EV Charging Stations On A Round FreewayDîñ Êsh Chä ÛhâñPas encore d'évaluation
- Coordinating Plug-In Electric Vehicle Charging With Electric Grid: Valley Filling and Target Load FollowingDocument14 pagesCoordinating Plug-In Electric Vehicle Charging With Electric Grid: Valley Filling and Target Load FollowingEngEzequielPas encore d'évaluation
- Bayram Bayhan CPEPE 2020 Location Analysis of Electric Vehicle Charging Stations For Maximum Capacity and CoverageDocument6 pagesBayram Bayhan CPEPE 2020 Location Analysis of Electric Vehicle Charging Stations For Maximum Capacity and CoveragechopinaPas encore d'évaluation
- Paper 11Document12 pagesPaper 11BALASREE MURALEEDHARANPas encore d'évaluation
- Multi-Stage Voltage Dependent Load Modelling of Fast Charging Electric VehicleDocument6 pagesMulti-Stage Voltage Dependent Load Modelling of Fast Charging Electric VehicleTareq AzizPas encore d'évaluation
- Electric Power Systems Research: Azhar Ul-Haq, Carlo Cecati, Ehab El-SaadanyDocument8 pagesElectric Power Systems Research: Azhar Ul-Haq, Carlo Cecati, Ehab El-SaadanymuzammalPas encore d'évaluation
- Integration of Renewable Energy Sources and Electric Vehicles in V2G Network PDFDocument28 pagesIntegration of Renewable Energy Sources and Electric Vehicles in V2G Network PDFALEX AGUSTO TORRE HUAMANPas encore d'évaluation
- TPWRD.2013.2269142 Traffic-Constrained Multiobjective Planning EV Charging StationsDocument10 pagesTPWRD.2013.2269142 Traffic-Constrained Multiobjective Planning EV Charging StationsAsif HussainPas encore d'évaluation
- IJISET V2 I8 123ดีDocument6 pagesIJISET V2 I8 123ดีPipat NakasenoPas encore d'évaluation
- Stochastic Analyses of Electric Vehicle Charging Impacts On Distribution NetworkDocument9 pagesStochastic Analyses of Electric Vehicle Charging Impacts On Distribution NetworkCharalampos PissaridesPas encore d'évaluation
- Hu, 2021 - Performance Evaluation Strategy For Battery Pack of Electric VehiclesDocument11 pagesHu, 2021 - Performance Evaluation Strategy For Battery Pack of Electric Vehiclesdosen00545Pas encore d'évaluation
- Computers & Industrial Engineering: Alejandro Hernández-Arauzo, Jorge Puente, Ramiro Varela, Javier SedanoDocument10 pagesComputers & Industrial Engineering: Alejandro Hernández-Arauzo, Jorge Puente, Ramiro Varela, Javier SedanoKaouther BenaliPas encore d'évaluation
- Processes 11 02256Document19 pagesProcesses 11 02256Pipat NakasenoPas encore d'évaluation
- Chen, Xiaopeng Shen, Weixiang Cao, Zhenwei Kapoor, AjayDocument6 pagesChen, Xiaopeng Shen, Weixiang Cao, Zhenwei Kapoor, AjayWalid AbidPas encore d'évaluation
- Electric Vehicle Charging Station Placement Formulation Complexity and SolutionsDocument11 pagesElectric Vehicle Charging Station Placement Formulation Complexity and Solutionsabhinandan.kumarPas encore d'évaluation
- Optimal Siting and Sizing of Electric Vehicle Charging StationsDocument6 pagesOptimal Siting and Sizing of Electric Vehicle Charging StationsDîñ Êsh Chä ÛhâñPas encore d'évaluation
- Optimization - of - Orderly - ChargingDischarging - Strate ImportantDocument8 pagesOptimization - of - Orderly - ChargingDischarging - Strate ImportantkarthicktamilmaniPas encore d'évaluation
- Cired2019-21 Ev PDFDocument6 pagesCired2019-21 Ev PDFRafa MoralesPas encore d'évaluation
- 2016 - Partial Recharge Strategies For The Electric Vehicle Routing Problem With Time WindowsDocument17 pages2016 - Partial Recharge Strategies For The Electric Vehicle Routing Problem With Time WindowsAndresPas encore d'évaluation
- Robust Broadcast-Communication Control of Electric Vehicle ChargingDocument5 pagesRobust Broadcast-Communication Control of Electric Vehicle ChargingAdriana Q.Pas encore d'évaluation
- Probabilistic Optimal Allocation of Electric Vehicle Charging Stations Considering The Uncertain Loads by Using The Monte Carlo Simulation MethodDocument8 pagesProbabilistic Optimal Allocation of Electric Vehicle Charging Stations Considering The Uncertain Loads by Using The Monte Carlo Simulation MethodCIKARANG KOTAPas encore d'évaluation
- Inductive Power Transmission System For Electric Car Charging Phase: Modeling Plus Frequency AnalysisDocument11 pagesInductive Power Transmission System For Electric Car Charging Phase: Modeling Plus Frequency AnalysisMylavarapu SriprithamPas encore d'évaluation
- Proceedings of The 2019 Winter Simulation Conference N. Mustafee, K.-H.G. Bae, S. Lazarova-Molnar, M. Rabe, C. Szabo, P. Haas, and Y.-J. Son, EdsDocument12 pagesProceedings of The 2019 Winter Simulation Conference N. Mustafee, K.-H.G. Bae, S. Lazarova-Molnar, M. Rabe, C. Szabo, P. Haas, and Y.-J. Son, EdsEunices MosqueraPas encore d'évaluation
- Method For Finding The Best Charging Station in The Power Internet of ThingsDocument7 pagesMethod For Finding The Best Charging Station in The Power Internet of ThingsMiguel Esteban MartinezPas encore d'évaluation
- Modeling and Planning of EV Fast Charging Station in Power GridDocument8 pagesModeling and Planning of EV Fast Charging Station in Power GridTareq AzizPas encore d'évaluation
- Forecasting Electric Vehicle Charging Demand Using Support Vector MachineDocument6 pagesForecasting Electric Vehicle Charging Demand Using Support Vector MachineIvan Sanchez LoorPas encore d'évaluation
- A Simple, Continuous, Analytical Charge/Capacitance Model For The Short-Channel MOSFETDocument8 pagesA Simple, Continuous, Analytical Charge/Capacitance Model For The Short-Channel MOSFETJohnathan zhangPas encore d'évaluation
- Optimal Planing of Eletrical Vehicle StationsDocument12 pagesOptimal Planing of Eletrical Vehicle StationsJoão PintoPas encore d'évaluation
- Excelente Ev 3Document13 pagesExcelente Ev 3DEVIL JIM KAZUYAPas encore d'évaluation
- Placement of Charging StationsDocument12 pagesPlacement of Charging StationsEduard TomaPas encore d'évaluation
- Project 2Document11 pagesProject 2Sai Kumar ashPas encore d'évaluation
- Some Problems of Dynamic Contactless Charging of Electric VehiclesDocument20 pagesSome Problems of Dynamic Contactless Charging of Electric VehiclesIlyas chetPas encore d'évaluation
- Energies 12 01986 v2 - 220508 - 212218Document14 pagesEnergies 12 01986 v2 - 220508 - 212218Carlos AndradePas encore d'évaluation
- Modeling of Fast Charging Station Equipped With Energy StorageDocument8 pagesModeling of Fast Charging Station Equipped With Energy StorageBhanu SandhyaPas encore d'évaluation
- Intelligent Vehicle-to-Vehicle Charging Navigation For Mobile Electric Vehicles Via VANET-Based CommunicationDocument19 pagesIntelligent Vehicle-to-Vehicle Charging Navigation For Mobile Electric Vehicles Via VANET-Based CommunicationTheerthaPas encore d'évaluation
- Ev Paper 3Document9 pagesEv Paper 3JAGANNATH PATRAPas encore d'évaluation
- 1 ProbabilisticGridImpactAnalysisofPEVCAMERA-READYDocument7 pages1 ProbabilisticGridImpactAnalysisofPEVCAMERA-READYJosé MartínezPas encore d'évaluation
- Energies 17 00289Document18 pagesEnergies 17 00289Rianfatah M.Pas encore d'évaluation
- MT - MFT 202101 0015Document9 pagesMT - MFT 202101 0015Ardhito PrimatamaPas encore d'évaluation
- 1 s2.0 S0307904X10003409 MainDocument10 pages1 s2.0 S0307904X10003409 MainKệ ThôiPas encore d'évaluation
- Computer Methods in Power Systems Analysis with MATLABD'EverandComputer Methods in Power Systems Analysis with MATLABPas encore d'évaluation
- Folder Fiamm Neptune 2010 EngDocument4 pagesFolder Fiamm Neptune 2010 EngchokribPas encore d'évaluation
- 03-1 Synchronous Machines 1 DNDocument25 pages03-1 Synchronous Machines 1 DNsaif thuraonPas encore d'évaluation
- BKLT DeaeratorDocument24 pagesBKLT Deaeratormalikgaurav01Pas encore d'évaluation
- EM230 BR BM3 Fitting InstructionsDocument2 pagesEM230 BR BM3 Fitting InstructionsRoman BabaevPas encore d'évaluation
- Advanced Cooling System - EMD00253ENDocument4 pagesAdvanced Cooling System - EMD00253ENnarayanan_anoob0% (1)
- Siemens Engineering Manual V7Document338 pagesSiemens Engineering Manual V7Jeremy Branch100% (2)
- Mega PostDocument5 pagesMega PostandreyfgPas encore d'évaluation
- Cache MemoryDocument20 pagesCache MemoryKeshav Bharadwaj RPas encore d'évaluation
- Estimate SR 14-15 02 KHANDEKARDocument5 pagesEstimate SR 14-15 02 KHANDEKARAkshay SavvasheriPas encore d'évaluation
- PIONEER AUTORADIO Deh-X4850bt Deh-X6850bt Operating Manual Ing - Esp - PorDocument72 pagesPIONEER AUTORADIO Deh-X4850bt Deh-X6850bt Operating Manual Ing - Esp - PorJesus NinalayaPas encore d'évaluation
- Marine Lubricants Equivalents List: Sae 50 TBN 57 Sae 50 TBN 55 Sae 40 TBN 60 Sae 50 TBN 50 Sae 50 TBN 55Document3 pagesMarine Lubricants Equivalents List: Sae 50 TBN 57 Sae 50 TBN 55 Sae 40 TBN 60 Sae 50 TBN 50 Sae 50 TBN 55spyros_peiraiasPas encore d'évaluation
- Selenium-75 Sources and Source Holders: ApplicationsDocument2 pagesSelenium-75 Sources and Source Holders: ApplicationsTanpreet SinghPas encore d'évaluation
- EMOC 208 Installation of VITT For N2 Cylinder FillingDocument12 pagesEMOC 208 Installation of VITT For N2 Cylinder Fillingtejcd1234Pas encore d'évaluation
- Zaroulas Mies Fullpaper 2020 05 21Document9 pagesZaroulas Mies Fullpaper 2020 05 21sidgonzoPas encore d'évaluation
- Bs en 00378 3 2016Document30 pagesBs en 00378 3 2016Darius VinPas encore d'évaluation
- EN RotomaticDocument4 pagesEN RotomaticnajeerwPas encore d'évaluation
- WT Lab ManualDocument44 pagesWT Lab ManualVenkatanagasudheer Thummapudi100% (1)
- BurnerDocument4 pagesBurnerAhmed Mohamed KhalilPas encore d'évaluation
- Ude My For Business Course ListDocument51 pagesUde My For Business Course ListShehroz BhuttaPas encore d'évaluation
- Preview ISO+749-1977 PDFDocument3 pagesPreview ISO+749-1977 PDFLiana GaniPas encore d'évaluation
- Apqp - DR SHFTDocument60 pagesApqp - DR SHFTrajesh5000100% (2)
- Skytrain Avia Services: Emergency Procedures ManualDocument32 pagesSkytrain Avia Services: Emergency Procedures ManualEndro RastadiPas encore d'évaluation
- Crankshaft Position (CKP) Sensor: 1F2-12 M161 Engine ControlsDocument6 pagesCrankshaft Position (CKP) Sensor: 1F2-12 M161 Engine ControlsKukuh SeptiantoPas encore d'évaluation
- Chapter 19A ConcreteDocument10 pagesChapter 19A ConcreteMofasa EPas encore d'évaluation
- State ManagementDocument16 pagesState Managementnegikamal703Pas encore d'évaluation
- Fluid Mechanics Seventh Edition by Frank M. WhiteDocument1 pageFluid Mechanics Seventh Edition by Frank M. WhiteDarKaiserPas encore d'évaluation
- Solar Pond - Awesome PDFDocument26 pagesSolar Pond - Awesome PDFKartik MahajanPas encore d'évaluation
- Production of Isopropyl Palmitate-Experimental StudiesDocument12 pagesProduction of Isopropyl Palmitate-Experimental Studiesikaw_3Pas encore d'évaluation
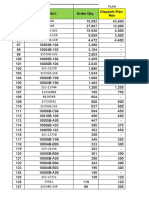
- Order Qty Vs Dispatch Plan - 04 11 20Document13 pagesOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPPas encore d'évaluation