Vous aimerez peut-être aussi
- Compactación (Presentación)Document50 pagesCompactación (Presentación)williamvargasmonge100% (1)
- Acelerogramas VariosDocument1 pageAcelerogramas VarioswilliamvargasmongePas encore d'évaluation
- Acelerogramas MéxicoDocument1 pageAcelerogramas MéxicowilliamvargasmongePas encore d'évaluation
- 1B Casos de AmortiguamientoDocument3 pages1B Casos de AmortiguamientowilliamvargasmongePas encore d'évaluation
- Guía Telefónica UCR 2018Document88 pagesGuía Telefónica UCR 2018williamvargasmongePas encore d'évaluation
- Resumen TFG Julio SolísDocument1 pageResumen TFG Julio SolíswilliamvargasmongePas encore d'évaluation
- Diagnóstico de Consolidación de Suelos Hospital de Alajuela 1998Document48 pagesDiagnóstico de Consolidación de Suelos Hospital de Alajuela 1998williamvargasmongePas encore d'évaluation
- Los Beneficios de Tomar Apuntes A ManoDocument5 pagesLos Beneficios de Tomar Apuntes A ManowilliamvargasmongePas encore d'évaluation
- Escala de Tiempo GeológicoDocument3 pagesEscala de Tiempo GeológicowilliamvargasmongePas encore d'évaluation
- Factores de Influencia Asentamiento Elástico Bajo Área Rectangular Giroud 1968Document8 pagesFactores de Influencia Asentamiento Elástico Bajo Área Rectangular Giroud 1968williamvargasmongePas encore d'évaluation
- Lista Asadas HidrotecnicaDocument48 pagesLista Asadas Hidrotecnicawilliamvargasmonge50% (4)
- Manual Pago en Linea CCSS 2014Document7 pagesManual Pago en Linea CCSS 2014williamvargasmongePas encore d'évaluation
- Solicitud Prest Vivienda HipoteDocument3 pagesSolicitud Prest Vivienda HipotewilliamvargasmongePas encore d'évaluation
- Guía Horarios SEP 1-2018Document42 pagesGuía Horarios SEP 1-2018williamvargasmongePas encore d'évaluation
- 3 CapituloDocument52 pages3 CapitulowilliamvargasmongePas encore d'évaluation
- Esfuerzos Elásticos 2014Document20 pagesEsfuerzos Elásticos 2014williamvargasmongePas encore d'évaluation
- Actividad 4 Evaluativa Riesgos FisicosDocument13 pagesActividad 4 Evaluativa Riesgos FisicosLucas Fernando RIVEROS CABALLEROPas encore d'évaluation
- 3ero. "A" EC Matriz Reporte Estudiantes Con Adaptaciones Curriculares-DECEDocument20 pages3ero. "A" EC Matriz Reporte Estudiantes Con Adaptaciones Curriculares-DECEMarco LaraPas encore d'évaluation
- Crucigrama de Física: HorizontalesDocument2 pagesCrucigrama de Física: HorizontalesPaula Andrea TinocoPas encore d'évaluation
- AGREGADOSDocument6 pagesAGREGADOSCeciBrownPas encore d'évaluation
- Aguja de Sutura Quirúrgica y Su Procedimiento de FabricaciónDocument9 pagesAguja de Sutura Quirúrgica y Su Procedimiento de FabricaciónLilia HurtadoPas encore d'évaluation
- Previo 11Document3 pagesPrevio 11Polly AsecasPas encore d'évaluation
- Los Campos de Gas de CamiseaDocument10 pagesLos Campos de Gas de CamiseaKaty Flores OrihuelaPas encore d'évaluation
- ASTROLOGIADocument19 pagesASTROLOGIAManuela NazPas encore d'évaluation
- Capitulo V Ensayos de AsfaltoDocument12 pagesCapitulo V Ensayos de AsfaltoAlvaroPas encore d'évaluation
- Vol I. Memoria DescriptivaDocument125 pagesVol I. Memoria DescriptivaGamonalVargasMarlonPas encore d'évaluation
- Formulario de Metodos NumericosDocument2 pagesFormulario de Metodos NumericosJerson Torres CardenasPas encore d'évaluation
- Ley de Watt y EjerciciosDocument3 pagesLey de Watt y EjerciciosRuben Zamora Ramos50% (4)
- Correlación de OisteinDocument8 pagesCorrelación de OisteinDavid Baruch0% (1)
- Manual de Nomenclatura de Compuestos Organicos de AlcanosDocument21 pagesManual de Nomenclatura de Compuestos Organicos de AlcanosCristian Cueva SotoPas encore d'évaluation
- Fesa Itlhc P01 Lab H Canales PDFDocument68 pagesFesa Itlhc P01 Lab H Canales PDFAlanMacPas encore d'évaluation
- Unidad II Teoría Atómica PDFDocument20 pagesUnidad II Teoría Atómica PDFErik FloresPas encore d'évaluation
- Volumen MolarDocument6 pagesVolumen MolarGerard Pajita100% (1)
- 1.5 Materiales Compuestos - Equipo 6Document16 pages1.5 Materiales Compuestos - Equipo 6Francisco Arredondo100% (1)
- EXAMENDocument11 pagesEXAMENJose Luis TenPas encore d'évaluation
- Practica1. Laboratorio Maquinas Eléctricas FIDocument6 pagesPractica1. Laboratorio Maquinas Eléctricas FISevy Tom ZoriuqPas encore d'évaluation
- Casos Prácticos Avance2Document2 pagesCasos Prácticos Avance2Lilly RFPas encore d'évaluation
- 3eso Quincena12Document16 pages3eso Quincena12api-295885253Pas encore d'évaluation
- Laboratorio de Termodinámica Practica 8Document10 pagesLaboratorio de Termodinámica Practica 8Claudia Ivonne0% (1)
- Número CuánticoDocument4 pagesNúmero CuánticoCachito Mont'blackPas encore d'évaluation
- Condensacion de PeliculaDocument7 pagesCondensacion de PeliculaChrystopher Ayasta Anticona67% (3)
- TERMOMETRIADocument12 pagesTERMOMETRIAAnonymous LNHGiVz8Pas encore d'évaluation
- Folleto Tecnico Arcus GlobalDocument13 pagesFolleto Tecnico Arcus GlobalHenry Fernando Valencia Rodriguez100% (1)
- Paleta para CaféDocument4 pagesPaleta para CaféjimmyPas encore d'évaluation
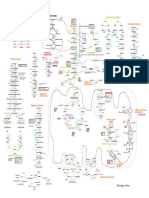
- Mapa MetabólicoDocument1 pageMapa MetabólicoJorge Pantoja60% (5)
- MÉTODOS PARA RESOLVER SISTEMAS DE ECUACIONES 2 X 2Document10 pagesMÉTODOS PARA RESOLVER SISTEMAS DE ECUACIONES 2 X 2betty atenciaPas encore d'évaluation