Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Waukesha Gas Engine Maintenance ManualDocument7 pagesWaukesha Gas Engine Maintenance Manualagusnnn56% (9)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- 9 Understanding Analysis Failures and WarningsDocument6 pages9 Understanding Analysis Failures and WarningsSara RamliPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- MP3002/MP4012 Mechanics of Deformable Solids Tutorial 1 - Free Vibration 2009/10 Semester 2Document8 pagesMP3002/MP4012 Mechanics of Deformable Solids Tutorial 1 - Free Vibration 2009/10 Semester 2David SaranaPas encore d'évaluation
- Resonance and Analysis of Barton's Pendulum PDFDocument17 pagesResonance and Analysis of Barton's Pendulum PDFmailbox_afeef2Pas encore d'évaluation
- Rotary Valve Functions BookletDocument17 pagesRotary Valve Functions Bookletamahmoud3Pas encore d'évaluation
- Circuit Analysis II Using MATLAB & SimulationDocument678 pagesCircuit Analysis II Using MATLAB & SimulationRana Abhishek Singh Kadgi100% (10)
- Transient Stability Analysis PDFDocument17 pagesTransient Stability Analysis PDFarvind_mallikeswaranPas encore d'évaluation
- Energies: Analysis and Mitigation of Sub-Synchronous Resonance For Doubly Fed Induction Generator Under VSG ControlDocument17 pagesEnergies: Analysis and Mitigation of Sub-Synchronous Resonance For Doubly Fed Induction Generator Under VSG ControlAwan Uji KrismantoPas encore d'évaluation
- Aalborg Universitet: Wasilewski, J. Wiechowski, Wojciech Tomasz Bak, Claus LethDocument8 pagesAalborg Universitet: Wasilewski, J. Wiechowski, Wojciech Tomasz Bak, Claus LethAwan Uji KrismantoPas encore d'évaluation
- Power Quality in Microgrids Based On Distributed GeneratorsDocument196 pagesPower Quality in Microgrids Based On Distributed GeneratorsAwan Uji KrismantoPas encore d'évaluation
- Comprehensive Assessment and Mitigation of Harmonic Resonance in Smart Distribution Grid With Solar PhotovoltaicDocument12 pagesComprehensive Assessment and Mitigation of Harmonic Resonance in Smart Distribution Grid With Solar PhotovoltaicAwan Uji KrismantoPas encore d'évaluation
- Power Quality in Microgrids Based On Distributed GeneratorsDocument196 pagesPower Quality in Microgrids Based On Distributed GeneratorsAwan Uji KrismantoPas encore d'évaluation
- APEC Solar Rooftop-Final Report-Training Curriculum-Material For Publication-April 2015Document71 pagesAPEC Solar Rooftop-Final Report-Training Curriculum-Material For Publication-April 2015Awan Uji KrismantoPas encore d'évaluation
- Impact of The Solar Photovoltaic PV Generation OnDocument7 pagesImpact of The Solar Photovoltaic PV Generation OnAwan Uji KrismantoPas encore d'évaluation
- Influence of Large-Scale PV On Voltage Stability oDocument15 pagesInfluence of Large-Scale PV On Voltage Stability oAwan Uji KrismantoPas encore d'évaluation
- Linier Generator PDFDocument48 pagesLinier Generator PDFAwan Uji KrismantoPas encore d'évaluation
- Linear PM Generator For Wave Energy Conversion PDFDocument77 pagesLinear PM Generator For Wave Energy Conversion PDFAwan Uji KrismantoPas encore d'évaluation
- A Comparative Analysis of Interaction in Power SystemDocument5 pagesA Comparative Analysis of Interaction in Power SystemAwan Uji KrismantoPas encore d'évaluation
- 109ee0518 PDFDocument63 pages109ee0518 PDFAwan Uji KrismantoPas encore d'évaluation
- ChE 122 Lecture Notes 03 II. Basic Concepts and The First Law (2.7-2.10)Document4 pagesChE 122 Lecture Notes 03 II. Basic Concepts and The First Law (2.7-2.10)MarkVergelBorjaPas encore d'évaluation
- Lecture-: Amr - Ahmed@eng - Asu.edu - EgDocument28 pagesLecture-: Amr - Ahmed@eng - Asu.edu - EgahmedaboshadyPas encore d'évaluation
- Form Inspeksi Mesin MillingDocument17 pagesForm Inspeksi Mesin MillingSasa MonicaPas encore d'évaluation
- Assignment 2 2015 AAiTDocument5 pagesAssignment 2 2015 AAiTMISKIR TADESSEPas encore d'évaluation
- Flexible and Rigid PavementDocument66 pagesFlexible and Rigid PavementArundhuti DasguptaPas encore d'évaluation
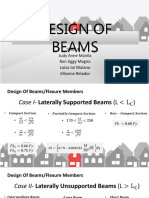
- Design of Beams 1Document30 pagesDesign of Beams 1Jill Relador100% (1)
- SL-SN.0 Drum Brake - 03.09Document38 pagesSL-SN.0 Drum Brake - 03.09Cem DufourPas encore d'évaluation
- Mechanical Engineering BookDocument2 pagesMechanical Engineering BookvikasmaePas encore d'évaluation
- BruchM Aufgabenheft - enDocument28 pagesBruchM Aufgabenheft - enIlham HakikiPas encore d'évaluation
- Comparison of Design and Analysis of Tube Sheet Thickness by Using Uhx Code-2/comparison of Design and Analysis of Tube Sheet Thickness by Using Uhx Code-2 PDFDocument13 pagesComparison of Design and Analysis of Tube Sheet Thickness by Using Uhx Code-2/comparison of Design and Analysis of Tube Sheet Thickness by Using Uhx Code-2 PDFruponline1Pas encore d'évaluation
- Hydraulic Braking System Definition Principle Diagram Components Working Application Advantages WithDocument4 pagesHydraulic Braking System Definition Principle Diagram Components Working Application Advantages WithMONISHA.K 1CK19EC038Pas encore d'évaluation
- Absorption Powerpoint Note1Document38 pagesAbsorption Powerpoint Note1thabisoPas encore d'évaluation
- ME 525 April 17, 2020 Internal Combustion Engine Performance Problems Set 1 InstructionsDocument2 pagesME 525 April 17, 2020 Internal Combustion Engine Performance Problems Set 1 Instructionssixela arugalPas encore d'évaluation
- Nagi Pressure VesselDocument15 pagesNagi Pressure Vesselmohammed alaa eldinPas encore d'évaluation
- MT4400 Front Brakes (Carlisle)Document15 pagesMT4400 Front Brakes (Carlisle)Brian CareelPas encore d'évaluation
- Sans Titre PDFDocument1 pageSans Titre PDFjoker63000Pas encore d'évaluation
- AP Physics C 2004 With AnswersDocument18 pagesAP Physics C 2004 With AnswersjhbmleePas encore d'évaluation
- Physics 1st Year Full BookDocument3 pagesPhysics 1st Year Full BookMukhtar AhmedPas encore d'évaluation
- t6010 PDFDocument412 pagest6010 PDFPapy Plus100% (1)
- New Holland E57C Mini Excavator Service Repair ManualDocument21 pagesNew Holland E57C Mini Excavator Service Repair ManualggjjjjotonesPas encore d'évaluation
- Chemical Engineering and Physical and Chemical Principles QuestionsDocument84 pagesChemical Engineering and Physical and Chemical Principles QuestionsMark Vincent EspinosaPas encore d'évaluation
- Perkins (EP)Document2 pagesPerkins (EP)Leo Dwi ArmandaPas encore d'évaluation
- MSS SP-43-2008Document15 pagesMSS SP-43-2008cadbulldogPas encore d'évaluation
- Prestressed Concrete Assignment TU DelftDocument4 pagesPrestressed Concrete Assignment TU DelfttimsykiPas encore d'évaluation
- B.Tech UG Project Ideas 4Document11 pagesB.Tech UG Project Ideas 4nambimunnaPas encore d'évaluation