Académique Documents
Professionnel Documents
Culture Documents
Modelos de La Mecanica de Los Medios Continuos
Transféré par
Anonymous mN7lUN8Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Modelos de La Mecanica de Los Medios Continuos
Transféré par
Anonymous mN7lUN8Droits d'auteur :
Formats disponibles
Tecnológico Nacional De México
Instituto Tecnológico De Cerro Azul
Presenta: Sobrevilla Castro Andrés
Número de Control: 17500106
Asesor: Ing. Paola Yared Maranto del Ángel.
Tema: Inv. Unidad I; Fundamentos matemáticos.
Materia: Fundamentos de la Mecánica de los medios continuos.
Carrera: Ingeniería Civil
Semestre: IV.
Grupo: 2.
Fecha: 13 de febrero de 2019
Fundamentos de la mecánica de los medios continuos.
Instituto Tecnológico de Cerro Azul 2
Fundamentos de la mecánica de los medios continuos.
Índice.
Unidad I.
Fundamentos matemáticos.
Introducción. …………………………………………………………………….. 4
1.1. Notación indicial…………………………………………………………. 5
1.2. Operaciones de tensores………………………………………………. 10
1.3. Métodos para el cálculo de valores y vectores propios…………….. 17
1.4. Gradiente, divergencia y rotacional…………………………………… 22
1.5. Teoremas de Green y Stokes……………………………………………. 26
Fuentes bibliográficas…………………………………………………………... 30
Instituto Tecnológico de Cerro Azul 3
Fundamentos de la mecánica de los medios continuos.
Introducción.
La Mecánica del Medio Continuo es una rama de la Física que estudia el estado de
esfuerzo y deformación (o flujo) de sólidos, líquidos y gases. Esta mecánica no toma
en cuenta la estructura molecular de la materia, sólo la considera como carente de
vacíos, huecos o discontinuidades. Se da por hecho que la materia se halla
distribuida en forma continua en todo su volumen, llenando por completo el espacio
que ocupa. Desde un punto de vista físico, un medio continuo es cualquier cuerpo
deformable que se estudia macroscópicamente, en el cual cada partícula del cuerpo
siempre permanece en contacto con sus vecinas. Este concepto de medio continuo
constituye el postulado fundamental de la mecánica del medio continuo, lo que
permite estudiar de manera semejante el comportamiento de sólidos, líquidos y
gases. La presentación del material se fundamenta en el análisis vectorial, sin
embargo, muchas de las ecuaciones que surgen en esta mecánica se expresan
también en notación indicial, con objeto de que el alumno se familiarice con este
enfoque, que es el que se emplea de manera generalizada en la literatura técnica
relacionada con esta rama de la Física.
Dentro de esta investigación se abordaran los temas descritos en el índice
detalladamente se explicara en que consiste cada subtema para poder entender la
primera unidad.
Instituto Tecnológico de Cerro Azul 4
Fundamentos de la mecánica de los medios continuos.
1.1. Notación indicial.
En Mecánica de Medios Continuos los objetos matemáticos más empleados son los
escalares, vectores y tensores en R3. Para trabajar con vectores se define una base
de vectores ortonormales B1 = {e1, e2, e3} de forma que todo vector v ∈ R 3 se
puede expresar como la siguiente combinación lineal.
v = v 1 e1 + v 2 e 2 + v 3 e3 .
Utilizando sumatorios se puede escribir la ecuación previa de una forma más
compacta:
Sin embargo es tedioso tener que escribir constantemente el símbolo de sumatorio
e indicar sus límites, pues siempre son los mismos. Por ello se adopta la siguiente
convención: en vez de (1) o (2) se escribe
v = vp ep .
Por lo que el ´índice repetido se denomina mudo. Se dice que la expresión (3)
emplea notación indicial o también el convenio de Einstein.
Dos vectores a y b son iguales si ap ep = bp ep. Esta igualdad se puede reescribir
como (ap – bp)ep = 0. Como los vectores de la base son linealmente independientes
la ultima expresión requiere que cada componente se anule, es decir, ap – bp = 0, o
de otra manera
Ap = bp.
De este simple ejemplo se deduce que cuando en una igualdad aparezca un mismo
índice en varios lugares, pero no multiplicándose, quiere decir que la igualdad es
válida cuando el índice toma el valor 1,2 ´o 3. Un índice de este tipo se denomina
libre y puede intercambiarse por otra letra cualquiera, siempre que no se emplee en
otra parte de la igualdad. Por ejemplo, la identidad (5) quiere expresar.
Instituto Tecnológico de Cerro Azul 5
Fundamentos de la mecánica de los medios continuos.
Nótese que en la identidad anterior (5) no hay ningún índice mudo, pues aunque p
aparezca en ambos lados de la igualdad las componentes correspondientes no
están multiplicando.
Cuando se trabaja con tensores de segundo orden también se emplea una base
tensorial de nueve tensores:
y todo tensor T se puede escribir como
En este caso se observa aun más claramente que resulta muy tedioso escribir y
trabajar con las nueve componentes de un tensor. Se podría escribir la expresión
previa como
Pero igual que con los vectores, se adopta la convención de que esta ´ultima
expresión se puede escribir simplemente como
Instituto Tecnológico de Cerro Azul 6
Fundamentos de la mecánica de los medios continuos.
Como en el caso de los vectores, los índices repetidos cuyos objetos
correspondientes se multiplican expresan un sumatorio, con dicho índice tomando
valores 1,2 y 3.
También como en el caso de los vectores, aquellos índices libres que aparecen
repetidos en varios lugares de una igualdad, pero cuyas componentes
correspondientes no se multiplican indican que la igualdad es válida cuando los
índices toman valores 1,2 y 3.
Así por ejemplo Tij + Rij = 7 quiere decir que la suma de cualquier componente del
tensor T de segundo orden más la misma componente del tensor de segundo orden
R es igual a 7.
Las consideraciones aquí presentadas son válidas también para tensores de mayor
orden. Por ejemplo:
Empleo de notación indicial en igualdades.
Cuando se expresan igualdades de cantidades vectoriales o tensoriales se puede
emplear notación compacta, indicial o matricial. De esta manera, por ejemplo, la
igualdad de dos tensores A y B se puede indicar de cualquiera de estas tres
maneras:
Instituto Tecnológico de Cerro Azul 7
Fundamentos de la mecánica de los medios continuos.
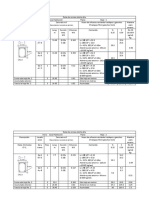
Cuadro resumen En el siguiente cuadro se resumen las operaciones más comunes
en algebra y calculo tensorial y sus expresiones en notación indicial. En toda la tabla
φ es una función escalar, a, b, c son vectores y R,S, T son tensores de orden dos.
Instituto Tecnológico de Cerro Azul 8
Fundamentos de la mecánica de los medios continuos.
1.2. Operaciones de tensores.
TENSORES Una herramienta fundamental para la Mecánica del Medio Continuo
(MMC) son los tensores, ya que si bien desde el punto de vista del álgebra
representan transformaciones lineales entre espacios vectoriales, en MMC se
emplean también para representar cantidades físicas asociadas a los medios
continuos (MC). Por tal motivo, en la primera etapa del texto se describirán éstos,
así como las reglas fundamentales del álgebra y del cálculo que cumplen dichos
tensores.
De acuerdo con el álgebra, un tensor se define como una transformación lineal entre
espacios vectoriales, de tal forma que si T es un tensor que transforma al vector a
en c y al vector b en d, entonces se deberá cumplir que
Ta = c
Tb = d
De tal forma que
Instituto Tecnológico de Cerro Azul 9
Fundamentos de la mecánica de los medios continuos.
Instituto Tecnológico de Cerro Azul 10
Fundamentos de la mecánica de los medios continuos.
OPERACIONES CON TENSORES
Para los tensores se definen operaciones de adición, sustracción y producto. En el
caso de la adición y sustracción el rango de los tensores involucrados en la
operación deberá ser el mismo y estas operaciones se realizan término a término.
Al hacer referencia a las propiedades es conveniente recordar la factibilidad de
representar a los tensores de primer orden como vectores (matrices renglón o
columna), a las díadas (tensores de segundo orden) como matrices de 3 x 3 y a los
tensores de cuarto rango como matrices de 9 x 9, entonces las propiedades con
respecto a las operaciones serán las mismas que las descritas para las matrices.
i. Conmutatividad
ii. Asociatividad con respecto a la adición.
Iii. Asociatividad, distributivita y conmutatividad con respecto a la multiplicación por
un escalar. Sean α y β escalares (tensores de rango cero) y A, B tensores de rango
superior, entonces:
Instituto Tecnológico de Cerro Azul 11
Fundamentos de la mecánica de los medios continuos.
v. Asociatividad de la adición con respecto al producto entre tensores de dimensión
superior a la cero. Al igual que con las matrices no existe conmutatividad en la
operación producto. Sean T , S tensores de rango dos (díadas) y a un tensor de
rango uno, entonces:
La adición de tensores se realiza término a término, de tal forma que:
T +S=W
En notación índice:
Instituto Tecnológico de Cerro Azul 12
Fundamentos de la mecánica de los medios continuos.
Producto de tensores
v. Asociatividad de la operación producto. Como ya antes fue mencionado no existe
conmutatividad en esta operación.
vi. Operaciones con la transpuesta del tensor
aTb = bTt a
En el caso de que el tensor sea simétrico
T = TT
Instituto Tecnológico de Cerro Azul 13
Fundamentos de la mecánica de los medios continuos.
El tensor T (de 2.° rango) se describe como
Expresándose en forma matricial
O simplemente
Multiplicación de tensores
• Producto vectorial (producto cruz)
A través de esta operación se define un nuevo tensor del mismo rango de sus
predecesores. Esta operación se le relaciona comúnmente a tensores de rango uno,
de tal forma que se da lugar a un nuevo vector el cual es normal al plano definido
por sus factores.
Axb=c
Donde
C I a,b
Instituto Tecnológico de Cerro Azul 14
Fundamentos de la mecánica de los medios continuos.
θ : ángulo entre las direcciones a, b
ˆe : vector unitario normal al plano definido por a, b
• Producto interno o producto punto
Si bien este producto, como se definirá más adelante, se describe para cualquier
tensor de rango mayor a cero, es usual su aplicación en tensores de rango uno;
para los cuales representa la proyección de uno en otro.
donde θ representa al ángulo menor definido entre los vectores a , b .
En notación índice equivale a
Este producto también se puede definir para tensores mayores del rango 1, por
ejemplo:
Instituto Tecnológico de Cerro Azul 15
Fundamentos de la mecánica de los medios continuos.
donde T M: es una descripción en notación general,
El triple producto escalar representa el producto punto de dos tensores de rango
uno, donde uno de ellos es a su vez resultado de un producto vectorial. Donde el
resultado representa el volumen (V) del prisma definido a través de los vectores a,
b, c.
Por razones de operación es evidente que primero se deberá realizar el producto
cruz.
El triple producto vectorial representa el producto cruz de dos vectores; uno de los
cuales es a su vez resultado de un previo producto vectorial, en este caso se
cumplen las siguientes identidades:
Instituto Tecnológico de Cerro Azul 16
Fundamentos de la mecánica de los medios continuos.
1.3. Métodos para el cálculo de valores y vectores propios.
En álgebra lineal, los vectores propios, autovectores de un operador lineal son los vectores
no nulos que, cuando son transformados por el operador, dan lugar a un múltiplo escalar
de sí mismos, con lo que no cambian su dirección. Este escalar λ recibe el nombre valor
propio. A menudo, una transformación queda completamente determinada por sus vectores
propios y valores propios. Un espacio propio, autoespacio o eigenespacio es el conjunto de
vectores propios con un valor propio común.
Las transformaciones lineales del espacio —como la rotación, la reflexión, el
ensanchamiento, o cualquier combinación de las anteriores; en esta lista podrían
incluirse otras transformaciones— pueden interpretarse mediante el efecto que
producen en los vectores. Los vectores pueden visualizarse como flechas de una
cierta longitud apuntando en una dirección y sentido determinados.
Los vectores propios de las transformaciones lineales son vectores que, o no
se ven afectados por la transformación o se ven multiplicados por un escalar, y
por tanto no varían su dirección.
El valor propio de un vector propio es el factor de escala por el que ha sido
multiplicado.
Un espacio propio es un espacio formado por todos los vectores propios del
mismo valor propio, además del vector nulo, que no es un vector propio.
La multiplicidad geométrica de un valor propio es la dimensión del espacio
propio asociado.
El espectro de una transformación en espacios vectoriales finitos es el conjunto
de todos sus valores propios.
Por ejemplo, un vector propio de una rotación en tres dimensiones es un vector
situado en el eje de rotación sobre el cual se realiza la rotación. El valor
propio correspondiente es 1 y el espacio propio contiene a todos los
vectores paralelos al eje. Como es un espacio de una dimensión, su multiplicidad
geométrica es uno. Es el único valor propio del espectro (de esta rotación) que es
un número real.
Instituto Tecnológico de Cerro Azul 17
Fundamentos de la mecánica de los medios continuos.
Formalmente, se definen los vectores propios y valores propios de la siguiente
manera: Si A: V → V es un operador lineal en un cierto espacio vectorial V, v es un
vector diferente de cero en V y c es un escalar tales que
𝐴𝒗 = 𝑐𝒗
Entonces decimos que v es un vector propio del operador A, y su valor propio
asociado es c. Observe que si v es un vector propio con el valor propio c entonces
cualquier múltiplo diferente de cero de v es también un vector propio con el valor
propio c. De hecho, todos los vectores propios con el valor propio asociado c junto
con 0, forman un subespacio de V, el espacio propio para el valor propio c. Observe
además que un un espacio propio Z es un subespacio invariante de A, es decir
dado w un vector en Z, el vector Aw también pertenece a Z. espacio propio Z es
un subespacio invariante de A, es decir dado w un vector en Z, el
vector Aw también pertenece a Z.
Casos de interes espcial. Intuitivamente, para las transformaciones lineales del espacio
de dos dimensiones , los vectores propios son:
Rotación: ningún vector propio de valores reales (existen en cambio pares
valor propio, vector propio complejos).
Reflexión: los vectores propios son perpendiculares y paralelos al eje de
simetría, los valores propios son -1 y 1, respectivamente.
Escalado uniforme: todos los vectores son vectores propios, y el valor propio
es el factor de escala.
Proyección sobre una recta: los vectores propios con el valor propio 1 son
paralelos a la línea, vectores propios con el valor propio 0 son paralelos a la
dirección de la proyección.
Instituto Tecnológico de Cerro Azul 18
Fundamentos de la mecánica de los medios continuos.
Cálculo de valores propios y vectores propios de matrices. Si se quiere calcular
los valores propios de una matriz dada y ésta es pequeña, se puede calcular
simbólicamente usando el polinomio característico. Sin embargo, a menudo resulta
imposible para matrices extensas, caso en el que se debe usar un método numérico.
Cálculo simbólico. Una herramienta importante para encontrar valores propios de
matrices cuadradas es el polinomio característico: decir que λ es un valor propio de A es
equivalente a decir que el sistema de ecuaciones lineales A v = λ v --> A v - λ v = 0
(Factorizando por v queda) (A - λI) v = 0 (donde I es la matriz identidad) tiene una solución
no nula v (un vector propio), y de esta forma es equivalente al determinante:
det(𝐴 − 𝜆𝐼) = 0
La función p(λ) = det(𝐴 − 𝜆𝐼)es un polinomio de λ pues los determinantes se definen
como sumas de productos. Éste es el polinomio característico de A: los valores
propios de una matriz son los ceros de su polinomio característico.
Todos los valores propios de una matriz A pueden calcularse resolviendo la
ecuación:
Si A es una matriz 𝑛 × 𝑛, entonces tiene grado 𝑛 y 𝐴 tiene como
máximo 𝑛 valores propios.
El teorema fundamental del álgebra dice que esta ecuación tiene
exactamente 𝑛 raíces (ceros), teniendo en cuenta su multiplicidad. Todos los
polinomios reales de grado impar tienen un número real como raíz, así que para n
impar toda matriz real tiene al menos valor propio real. En el caso de las matrices
reales, para 𝑛 par e impar, los valores propios no reales son pares conjugados.
Instituto Tecnológico de Cerro Azul 19
Fundamentos de la mecánica de los medios continuos.
Encontrando vectores propios. Una vez que se conocen los valores propios λ, los
vectores propios se pueden hallar resolviendo el sistema de ecuaciones homogéneo:
Una forma más sencilla de obtener vectores propios sin resolver un sistema de
ecuaciones lineales se basa en el teorema de Cayley-Hamilton que establece que
cada matriz cuadrada satisface su propio polinomio característico. Así,
si son los valores propios de A se cumple que
por lo que los vectores columna de son vectores propios
de .
Ejemplo de matriz sin valores propios reales. Un ejemplo de matriz sin valores
propios reales es la rotación de 90 grados en el sentido de las manecillas del reloj:
Cuyo polinomio característico es y sus valores propios son el par de
conjugados complejos i, -i. Los vectores propios asociados tampoco son reales.
Ejemplo
Considérese la matriz
que representa un operador lineal R³ → R³. Si se desea computar todos los valores
propios de A, se podría empezar determinando el polinomio característico:
Instituto Tecnológico de Cerro Azul 20
Fundamentos de la mecánica de los medios continuos.
y porque p(x) = - (x - 2)(x - 1)(x + 1) se ve que los valores propios de A son 2, 1 y -
1. El teorema de Cayley-Hamilton establece que cada matriz cuadrada satisface su
propio polinomio característico. Es decir:
Efectivamente, para el caso del valor propio 2, se puede comprobar que
De donde (1, 1, -1) es un vector propio asociado a 2.
Cálculo numérico. En la práctica, los valores propios de las matrices extensas no se
calculan usando el polinomio característico. Calcular el polinomio resulta muy costoso, y
extraer las raíces exactas de un polinomio de grado alto puede ser difícil de calcular y
expresar: el teorema de Abel-Ruffini implica que las raíces de los polinomios de grado alto
(5 o superior) no pueden expresarse usándose simplemente raíces enésimas. Existen
algoritmos eficientes para aproximar raíces de polinomios, pero pequeños errores en la
estimación de los valores propios pueden dar lugar a errores grandes en los vectores
propios. En consecuencia, los algoritmos generales para encontrar vectores propios y
valores propios son iterativos. La manera más fácil es el método de las potencias: se escoge
un vector aleatorio y se calcula una secuencia de vectores unitarios:
, , , ...
Esta sucesión casi siempre convergerá a un vector propio correspondiente al mayor
valor propio. Este algoritmo es sencillo, pero no demasiado útil aisladamente. Sin
embargo, hay métodos más populares, como la descomposición QR, que se basan
en él.
Instituto Tecnológico de Cerro Azul 21
Fundamentos de la mecánica de los medios continuos.
1.5. Gradiente, divergencia y rotacional.
Si se toma como campo escalar el que se asigna a cada punto del espacio una
presión P (campo escalar de 3 variables), entonces el vector gradiente en un punto
genérico del espacio indicará la dirección en la cual la presión cambiará más
rápidamente. Otro ejemplo es el de considerar el mapa de líneas de nivel de una
montaña como campo escalar que asigna a cada pareja de coordenadas
latitud/longitud un escalar altitud (campo escalar de 2 variables). En este caso el
vector gradiente en un punto genérico indicará la dirección de máxima inclinación
de la montaña. Nótese que el vector gradiente será perpendicular a las líneas de
contorno (líneas "equiescalares") del mapa. El gradiente se define como el campo
vectorial cuyas funciones coordenadas son las derivadas parciales del campo
escalar, esto es:
Esta definición se basa en que el gradiente permite calcular fácilmente las derivadas
direccionales. Definiendo en primer lugar la derivada direccional según un vector
Instituto Tecnológico de Cerro Azul 22
Fundamentos de la mecánica de los medios continuos.
Una forma equivalente de definir el gradiente es como el único vector que,
multiplicado por el vector unitario, da la derivada direccional del campo escalar:
Con la definición anterior, el gradiente está caracterizado de forma unívoca. El
gradiente se expresa alternativamente mediante el uso del operador nabla:
Propiedades. El gradiente verifica que:
os de silla).
Divergencia. La divergencia de un campo vectorial mide la diferencia entre el flujo
entrante y el flujo saliente de un campo vectorial sobre la superficie que rodea a un
volumen de control, por tanto, si el campo tiene "fuentes" o "sumideros" la
divergencia de dicho campo será diferente de cero.
Instituto Tecnológico de Cerro Azul 23
Fundamentos de la mecánica de los medios continuos.
Divergencia de un campo vectorial. La divergencia de un campo vectorial en un
punto es un campo escalar, y se define como el flujo del campo vectorial por unidad
de volumen conforme el volumen alrededor del punto tiende a cero:
Rotacional. En el cálculo vectorial, el rotacional o rotor es un operador vectorial que
muestra la tendencia de un campo vectorial a inducir rotación alrededor de un punto.
Matemáticamente, esta idea se expresa como el límite de la circulación del campo
vectorial, cuando la curva sobre la que se integra se reduce a un punto:
Aquí, AS es el área de la superficie apoyada en la curva, que se reduce a un punto.
El resultado de este límite no es el rotacional completo (que es un vector), sino solo
su componente según la dirección normal a y orientada según la regla de la mano
derecha. Para obtener el rotacional completo deberán calcularse tres límites,
considerando tres curvas situadas en planos perpendiculares.
En la notación de Einstein, con el símbolo de Levi-Civita se escribe como.
Propiedades:
Instituto Tecnológico de Cerro Azul 24
Fundamentos de la mecánica de los medios continuos.
Instituto Tecnológico de Cerro Azul 25
Fundamentos de la mecánica de los medios continuos.
1.5. Teoremas de Green y Stokes.
Teorema de Green. En física y matemáticas, el teorema de Green da la relación
entre una integral de línea alrededor de una curva cerrada simple C y una integral
doble sobre la región plana D limitada por C. El teorema de Green se llama así por
el científico británico George Green y es un caso especial del más general teorema
de Stokes. El teorema afirma:
Sea C una curva cerrada simple positivamente orientada, diferenciable por trozos,
en el plano y sea D la región limitada por C. Si L y M tienen derivadas parciales
continuas en una región abierta que contiene D,
A veces la notación
Se utiliza para establecer que la integral de línea está calculada usando la
orientación positiva (antihoraria) de la curva cerrada C. Relación con el teorema de
la divergencia:
El teorema de Green es equivalente a la siguiente analogía bidimensional del
teorema de Stokes:
Instituto Tecnológico de Cerro Azul 26
Fundamentos de la mecánica de los medios continuos.
Donde ñ es el vector normal saliente en la frontera.
Para ver esto, considere la unidad normal en la parte derecha de la ecuación.
Como dr = ( dx,dy) es un vector apuntando tangencialmente a través de una
curva, y la curva C está orientada de manera positiva (es decir, en contra del sentido
de las agujas del reloj) a través de la frontera, un vector normal saliente sería aquel
que apunta en 90º hacia la derecha, el cual podría
Ser (dy – dx).
Que por medio del teorema de Green resulta:
Instituto Tecnológico de Cerro Azul 27
Fundamentos de la mecánica de los medios continuos.
Teorema de Stokes.
El teorema de Stokes en geometría diferencial es una proposición sobre la
integración de formas diferenciales que generaliza varios teoremas del cálculo
vectorial. Se nombra así por George Gabriel Stokes (1819-1903), a pesar de que la
primera formulación conocida del teorema fue realizada por William Thomson y
aparece en una correspondencia que él mantuvo con Stokes.
El teorema fundamental del cálculo establece que la integral de una función f en el
intervalo [a, b] puede ser calculada por medio de una antiderivada F de f:
El teorema de Stokes es una generalización de este teorema en el siguiente sentido:
En un lenguaje matemático, el intervalo abierto (a, b) es una variedad matemática
unidimensional. Su frontera es el conjunto que consiste en los dos puntos a y b.
Integrar f en ese intervalo puede ser generalizado como integrar formas en una
variedad matemática de mayor orden. Para esto se necesitan dos condiciones
técnicas: la variedad matemática debe ser orientable, y la forma tiene que ser
compacta de manera que otorgue una integral bien definida.
Los dos puntos a y b forman parte de la frontera del intervalo abierto. Más
genéricamente, el teorema de Stokes se aplica a variedades orientadas M con
frontera. La frontera ∂M de Mes una variedad en sí misma y hereda la orientación
Instituto Tecnológico de Cerro Azul 28
Fundamentos de la mecánica de los medios continuos.
natural de M. Por ejemplo, la orientación natural del intervalo da una orientación de
los dos puntos frontera. Intuitivamente ahereda la orientación opuesta a b, al ser
extremos opuestos del intervalo. Entonces, integrando F en los dos puntos frontera
a, b es equivalente a tomar la diferencia F(b) − F(a).
Por lo que el teorema fundamental relaciona la integral de una función sobre un
intervalo, con una integral o suma de la primitiva de la función en los límites que
encierran dicho intervalo:
El teorema de Stokes generaliza todos estos resultados, relacionando la integral
sobre una frontera con la integral de una función "derivada" sobre el interior de la
región limitada por la frontera.
Instituto Tecnológico de Cerro Azul 29
Fundamentos de la mecánica de los medios continuos.
Fuentes bibliográficas.
http://www.itcancun.edu.mx/instituto/academico/licenciatura/Ing-
Civil/Fundamentos-de-Mec%C3%A1nica-de-los-Medios-Continuos.pdf
http://w3.mecanica.upm.es/mmc-ig/Apuntes/indices.pdf
http://www.ptolomeo.unam.mx:8080/xmlui/bitstream/handle/132.248.52.100/2182/0
5Cap%C3%ADtulo1F-ene2013.pdf?sequence=10
http://es.wikipedia.org/wiki/Divergencia_(matemática)
http://es.wikipedia.org/wiki/Gradiente
http://es.wikipedia.org/wiki/Teorema_de_Green
http://es.wikipedia.org/wiki/Teorema_de_Stokes
Instituto Tecnológico de Cerro Azul 30
Vous aimerez peut-être aussi
- Equivalente de ArenaDocument5 pagesEquivalente de ArenaAnonymous mN7lUN8Pas encore d'évaluation
- 1.5calculo de Bajantes SanitariasDocument12 pages1.5calculo de Bajantes SanitariasAnonymous mN7lUN8Pas encore d'évaluation
- Desgaste Los AngelesDocument5 pagesDesgaste Los AngelesAnonymous mN7lUN8Pas encore d'évaluation
- Unidad 4 Integracion de Costos Indirectos PDFDocument42 pagesUnidad 4 Integracion de Costos Indirectos PDFAnonymous mN7lUN850% (2)
- Dalas y Cadenas GeneradorDocument8 pagesDalas y Cadenas GeneradorAnonymous mN7lUN8Pas encore d'évaluation
- Plano AmuebladoDocument1 pagePlano AmuebladoAnonymous mN7lUN8Pas encore d'évaluation
- Metreado de Cadena de CimentacionDocument1 pageMetreado de Cadena de CimentacionAnonymous mN7lUN8Pas encore d'évaluation
- Unidad 1. Costos y Presupuestos.Document97 pagesUnidad 1. Costos y Presupuestos.Anonymous mN7lUN8Pas encore d'évaluation
- Unidad 2 La Ética en La Ciencia y LaDocument10 pagesUnidad 2 La Ética en La Ciencia y LaAnonymous mN7lUN8Pas encore d'évaluation
- 125 Frases en Inglés para IniciarDocument35 pages125 Frases en Inglés para IniciarAnonymous mN7lUN8Pas encore d'évaluation
- Modelo de Cimbra para Castillos Planta BajaDocument3 pagesModelo de Cimbra para Castillos Planta BajaAnonymous mN7lUN8Pas encore d'évaluation
- Cuentos y LeyendasDocument12 pagesCuentos y LeyendasAnonymous mN7lUN8Pas encore d'évaluation
- Dalas de Enrase Planta AltaDocument4 pagesDalas de Enrase Planta AltaAnonymous mN7lUN8Pas encore d'évaluation
- Concreto en LozasDocument4 pagesConcreto en LozasAnonymous mN7lUN8Pas encore d'évaluation
- Tabla de Cuadrillas de TrabajoDocument22 pagesTabla de Cuadrillas de TrabajoAnonymous mN7lUN8Pas encore d'évaluation
- Leyes de Los LogaritmosDocument6 pagesLeyes de Los LogaritmosWill Flores0% (1)
- Numeración IIDocument3 pagesNumeración IIFernando Rebaza VegaPas encore d'évaluation
- Taller de Programacion EnteraDocument8 pagesTaller de Programacion EnteraHamilton MtzPas encore d'évaluation
- CAPITULO 14 Sistemas ElectrDocument33 pagesCAPITULO 14 Sistemas Electrevelyn marifer0% (1)
- Familia 1000 - Secuancia 3ro.Document19 pagesFamilia 1000 - Secuancia 3ro.JULIANAPas encore d'évaluation
- Geoestadística PPTTDocument72 pagesGeoestadística PPTTJULIO100% (2)
- Métodos de Generación de Números PseudoaleatoriosDocument5 pagesMétodos de Generación de Números PseudoaleatoriosCesar Ivan ZegarraPas encore d'évaluation
- Ejercicio Libro Maximo VillónDocument34 pagesEjercicio Libro Maximo VillónAnonymous zZxNFuWm6Pas encore d'évaluation
- Cálculos Cruz de Malta (Posicion, Velocidad, Aceleración)Document14 pagesCálculos Cruz de Malta (Posicion, Velocidad, Aceleración)Triany Castro100% (2)
- Informe Practica VI InfortecDocument13 pagesInforme Practica VI InfortecKarol RuedaPas encore d'évaluation
- Reporte Proyecto Formativo - 2085598 - MANTENIMIENTO DE LA RED DE DATDocument14 pagesReporte Proyecto Formativo - 2085598 - MANTENIMIENTO DE LA RED DE DATMichael Andres Arroyo FigueroaPas encore d'évaluation
- 7 Series OrtogonalesDocument11 pages7 Series OrtogonalesAlga SebasPas encore d'évaluation
- Sistema de Ecuaciones 2x2 - Regla de CramerDocument7 pagesSistema de Ecuaciones 2x2 - Regla de CramerWilliam PalaciosPas encore d'évaluation
- Semana 8 Unsa PDFDocument11 pagesSemana 8 Unsa PDFCristhiam TiconaPas encore d'évaluation
- PQF-02-Superficies D'energia Potencial I CaracteritzacioDocument21 pagesPQF-02-Superficies D'energia Potencial I CaracteritzacioOrlando PayaresPas encore d'évaluation
- Tipo de Ejercicios 1Document17 pagesTipo de Ejercicios 1Sergio Felipe GrisalesPas encore d'évaluation
- Taller 2 CalculoDocument5 pagesTaller 2 CalculoFelipe AriasPas encore d'évaluation
- Pagina 12Document2 pagesPagina 12Aldo Juan Gil Crisóstomo0% (1)
- Taller1 2022-1Document1 pageTaller1 2022-1JULIO CESAR MARTINEZ ACOSTAPas encore d'évaluation
- Pierre Simon Marquéz de LaplaceDocument5 pagesPierre Simon Marquéz de LaplaceGilbert Baique CamachoPas encore d'évaluation
- Administracion I Bloque II Actividades 1 2 3 4 y 5Document3 pagesAdministracion I Bloque II Actividades 1 2 3 4 y 5Gustavo Martinez Montes100% (1)
- Examen Logica MatematicaDocument12 pagesExamen Logica Matematicagarcpov50% (2)
- En Qué Consiste La Propiedad de Densidad de Numeros Reales y Como Indicarlos en Forma GeneralDocument17 pagesEn Qué Consiste La Propiedad de Densidad de Numeros Reales y Como Indicarlos en Forma GeneralRoman Porras0% (1)
- Unidad 1 - Leivy Zuluaga Henao PDFDocument12 pagesUnidad 1 - Leivy Zuluaga Henao PDFDaniela PalmaPas encore d'évaluation
- Taller Ecuaciones A6Document7 pagesTaller Ecuaciones A6Yerly barrios maxPas encore d'évaluation
- EscalaDocument7 pagesEscalaArgemiroEscobarSantacruzPas encore d'évaluation
- Matemáticas ConjuntosDocument8 pagesMatemáticas ConjuntosAngeles PaezPas encore d'évaluation
- Guia N° 1 NUMEROS (Noche)Document8 pagesGuia N° 1 NUMEROS (Noche)profesorajudithPas encore d'évaluation
- Problemas Resueltos T1 (A)Document9 pagesProblemas Resueltos T1 (A)Pool PosadaPas encore d'évaluation