Vous aimerez peut-être aussi
- Development Manual ElastixDocument49 pagesDevelopment Manual Elastixductdt09Pas encore d'évaluation
- IWF SDK DocumentationDocument27 pagesIWF SDK Documentationsilly_rabbitzPas encore d'évaluation
- General InformationDocument7 pagesGeneral InformationTechne PhobosPas encore d'évaluation
- Organizing Your Data Epos 3.0 - Voxelgeo 3.0Document10 pagesOrganizing Your Data Epos 3.0 - Voxelgeo 3.0Ilija VasiljevićPas encore d'évaluation
- SW-005 Solidworks Part FilesDocument4 pagesSW-005 Solidworks Part FilesDeven DeickertPas encore d'évaluation
- Code Blocks ManualDocument69 pagesCode Blocks ManualsilasthestrickenPas encore d'évaluation
- Cobie PDFDocument40 pagesCobie PDFShiyamraj ThamodharanPas encore d'évaluation
- 8 Blocks PDFDocument5 pages8 Blocks PDFybouriniPas encore d'évaluation
- 74e43bd1-4753-41a9-8305-f274a1105489Document18 pages74e43bd1-4753-41a9-8305-f274a1105489Smita MohantyPas encore d'évaluation
- More About ProgrammingDocument11 pagesMore About ProgrammingFlorinPas encore d'évaluation
- 11 and .NET 7 Part12Document50 pages11 and .NET 7 Part12sladjanPas encore d'évaluation
- Gateway NotesDocument28 pagesGateway NotesgufranPas encore d'évaluation
- Custom BlocksDocument4 pagesCustom Blocksnatehc7Pas encore d'évaluation
- Aluim Important NotesDocument39 pagesAluim Important NotesAHMED SALEHPas encore d'évaluation
- DokaDocument8 pagesDokaDamodharanPas encore d'évaluation
- Technical-Drafting-9 Module Q2 Week-3Document2 pagesTechnical-Drafting-9 Module Q2 Week-3Anthony Bernard BalderamaPas encore d'évaluation
- B1 I FW01 Dev EnvDocument28 pagesB1 I FW01 Dev EnvmaucimPas encore d'évaluation
- Summary-Intro To VB,.NET & VsDocument10 pagesSummary-Intro To VB,.NET & VsediealiPas encore d'évaluation
- Symbol TablesDocument10 pagesSymbol TablesMohammad Yaseen PashaPas encore d'évaluation
- Using Visual Basic's Standard ControlsDocument89 pagesUsing Visual Basic's Standard ControlsFlorinPas encore d'évaluation
- Object Persisten Framework in DelphiDocument18 pagesObject Persisten Framework in DelphiWasis PrionggoPas encore d'évaluation
- Assignment8 WriteupDocument3 pagesAssignment8 Writeupapi-309107767Pas encore d'évaluation
- UserManual ch7,8Document19 pagesUserManual ch7,8wleaderheePas encore d'évaluation
- For ExampleDocument8 pagesFor ExampleBhagyasri Annam JaldawarPas encore d'évaluation
- NX Ribbon-Customization and TransitionDocument17 pagesNX Ribbon-Customization and TransitionDangerBassPas encore d'évaluation
- Announcements Tips and Tricks - Solidworks Templates Efficient Assemblies Weldments - Part 2 Next MeetingDocument4 pagesAnnouncements Tips and Tricks - Solidworks Templates Efficient Assemblies Weldments - Part 2 Next MeetingأبومحمدالزياتPas encore d'évaluation
- C# Unit 5Document80 pagesC# Unit 5Sheraz Jabeen NPas encore d'évaluation
- Git From Bottom UpDocument31 pagesGit From Bottom UpMúsica Experimental A MallorcaPas encore d'évaluation
- Cia 2 MWDocument17 pagesCia 2 MWNaresh SPas encore d'évaluation
- NET AssemblyDocument23 pagesNET Assemblyabhishekanand0107Pas encore d'évaluation
- VBDocument10 pagesVBChinnu ReddyPas encore d'évaluation
- Lab 10Document14 pagesLab 10shailly_shahPas encore d'évaluation
- Block Ayuda AutocadDocument8 pagesBlock Ayuda AutocadjosePas encore d'évaluation
- L Embedded Distro PDFDocument21 pagesL Embedded Distro PDFNabeel RaoofPas encore d'évaluation
- Drools NET-3.0 GuideDocument11 pagesDrools NET-3.0 GuideJohannes KuahPas encore d'évaluation
- Composer Schematic Capture: Dfii Design Framework IiDocument22 pagesComposer Schematic Capture: Dfii Design Framework IibigfatdashPas encore d'évaluation
- Genmed-C IN 32bit EDocument9 pagesGenmed-C IN 32bit Eaungwintun81Pas encore d'évaluation
- Databricks 1667066239Document10 pagesDatabricks 1667066239Adithya Vardhan Reddy Kothwal PatelPas encore d'évaluation
- Introduction To Windows Azure Blob StorageDocument19 pagesIntroduction To Windows Azure Blob StorageAnirban PaulPas encore d'évaluation
- ComponentsDocument34 pagesComponentsbuntyneffsar100% (1)
- AssembliesDocument7 pagesAssembliesapi-3850055100% (1)
- DmallocDocument60 pagesDmallocbojke2000Pas encore d'évaluation
- Chapter2 ASMDocument103 pagesChapter2 ASMsperatePas encore d'évaluation
- Operating Systems Development Series Basic CRTDocument7 pagesOperating Systems Development Series Basic CRTSandeep RoyPas encore d'évaluation
- Object-Oriented Design Patterns in The Kernel, Part 1 (LWN - Net)Document49 pagesObject-Oriented Design Patterns in The Kernel, Part 1 (LWN - Net)Rishabh MalikPas encore d'évaluation
- Memory Map inDocument22 pagesMemory Map inkrajasekarantutiPas encore d'évaluation
- Visual BasicDocument36 pagesVisual Basicbanumathisureshkumar100% (1)
- Block Library: Block Library Is An Autolisp Utility For Managing Blocks by Storing Blocks and Block Slide Images inDocument6 pagesBlock Library: Block Library Is An Autolisp Utility For Managing Blocks by Storing Blocks and Block Slide Images insponja26Pas encore d'évaluation
- Design of A Basic BlockDocument5 pagesDesign of A Basic BlockAnonymous YqkWgcPas encore d'évaluation
- Inventor 2009 Projects Overview: Project File LocationsDocument6 pagesInventor 2009 Projects Overview: Project File Locationskishore_garakipatiPas encore d'évaluation
- Visual Basic 6.0 Notes ShortDocument43 pagesVisual Basic 6.0 Notes Shortjoinst140288% (73)
- Milkyway FAQDocument11 pagesMilkyway FAQBhai BaiPas encore d'évaluation
- Visual Basic 6 0 Notes ShortDocument43 pagesVisual Basic 6 0 Notes Shortmallareddy_pindiPas encore d'évaluation
- Hibernate, Spring & Struts Interview Questions You'll Most Likely Be AskedD'EverandHibernate, Spring & Struts Interview Questions You'll Most Likely Be AskedPas encore d'évaluation
- Oracle Database Administration Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesD'EverandOracle Database Administration Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesÉvaluation : 5 sur 5 étoiles5/5 (1)
- Here Are 10 Simple Tips To Improve The Range of Your Electric CarDocument6 pagesHere Are 10 Simple Tips To Improve The Range of Your Electric CarfabiobonadiaPas encore d'évaluation
- Learn Computer ScienceDocument24 pagesLearn Computer SciencefabiobonadiaPas encore d'évaluation
- Careelite - De-Driving An Electric Car - 10 Tips Tricks Every E-Car Owner Should KnowDocument6 pagesCareelite - De-Driving An Electric Car - 10 Tips Tricks Every E-Car Owner Should KnowfabiobonadiaPas encore d'évaluation
- Electronics-Tutorials - Ws-Power Factor CorrectionDocument18 pagesElectronics-Tutorials - Ws-Power Factor CorrectionfabiobonadiaPas encore d'évaluation
- What Is The Vegan DietDocument4 pagesWhat Is The Vegan DietfabiobonadiaPas encore d'évaluation
- 10 Essential Electric Vehicle Maintenance Service TipsDocument4 pages10 Essential Electric Vehicle Maintenance Service TipsfabiobonadiaPas encore d'évaluation
- Gigabyte GA-M61VME-S2 Rev 20 Processor Support and SpecificationsDocument16 pagesGigabyte GA-M61VME-S2 Rev 20 Processor Support and SpecificationsfabiobonadiaPas encore d'évaluation
- How PCs WorkDocument9 pagesHow PCs WorkfabiobonadiaPas encore d'évaluation
- Computers: What Is A Computer Program?Document11 pagesComputers: What Is A Computer Program?fabiobonadiaPas encore d'évaluation
- 10 Quick Tips For Owning An Electric VehicleDocument3 pages10 Quick Tips For Owning An Electric VehiclefabiobonadiaPas encore d'évaluation
- Laptop Dell Power On Sequence Diagrams Training CourseDocument4 pagesLaptop Dell Power On Sequence Diagrams Training CoursefabiobonadiaPas encore d'évaluation
- What Is Anti-Lock BrakingnbspSystemDocument3 pagesWhat Is Anti-Lock BrakingnbspSystemfabiobonadiaPas encore d'évaluation
- Booting: Boot Is Short For Bootstrap Oneself Up by One's BootstrapsDocument19 pagesBooting: Boot Is Short For Bootstrap Oneself Up by One's BootstrapsfabiobonadiaPas encore d'évaluation
- Step by Step To Repair MainboardDocument21 pagesStep by Step To Repair MainboardfabiobonadiaPas encore d'évaluation
- Kitronik - Co.uk-How A Power Supply WorksDocument6 pagesKitronik - Co.uk-How A Power Supply WorksfabiobonadiaPas encore d'évaluation
- Power Supply Sequencing SimplifiedDocument7 pagesPower Supply Sequencing SimplifiedfabiobonadiaPas encore d'évaluation
- How Does A Computer WorkDocument2 pagesHow Does A Computer WorkfabiobonadiaPas encore d'évaluation
- Power Supply: General ClassificationDocument11 pagesPower Supply: General ClassificationfabiobonadiaPas encore d'évaluation
- How PC Power Supplies WorkDocument6 pagesHow PC Power Supplies WorkfabiobonadiaPas encore d'évaluation
- What Is ABS and How Does It WorkDocument2 pagesWhat Is ABS and How Does It WorkfabiobonadiaPas encore d'évaluation
- Anti-Lock Braking SystemDocument7 pagesAnti-Lock Braking SystemfabiobonadiaPas encore d'évaluation
- Power Supply Unit ComputerDocument12 pagesPower Supply Unit Computerfabiobonadia0% (1)
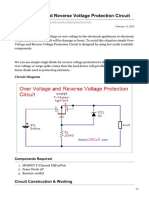
- Over Voltage and Reverse Voltage Protection CircuitDocument2 pagesOver Voltage and Reverse Voltage Protection CircuitfabiobonadiaPas encore d'évaluation
- SSH Secure ShellDocument6 pagesSSH Secure ShellfabiobonadiaPas encore d'évaluation
- Waveguide - Se-Write A Comment PDFDocument2 pagesWaveguide - Se-Write A Comment PDFfabiobonadiaPas encore d'évaluation
- Over Voltage and Reverse Voltage Protection CircuitDocument2 pagesOver Voltage and Reverse Voltage Protection CircuitfabiobonadiaPas encore d'évaluation
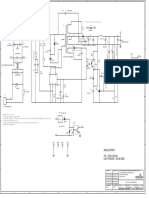
- Single Output O/P 5V at 1.5a.max LAST UPDATED:-29 JAN, 2008Document1 pageSingle Output O/P 5V at 1.5a.max LAST UPDATED:-29 JAN, 2008fabiobonadiaPas encore d'évaluation
- 914-0501 Cummins Homesite EGMB Portable Genset Service Manual (03-2006)Document58 pages914-0501 Cummins Homesite EGMB Portable Genset Service Manual (03-2006)fabiobonadia100% (1)
- GuideDocument9 pagesGuidefabiobonadiaPas encore d'évaluation
- EEVblog Electronics Community ForumDocument16 pagesEEVblog Electronics Community ForumfabiobonadiaPas encore d'évaluation
- flowswitchHFS25 PDFDocument2 pagesflowswitchHFS25 PDFlajosmolPas encore d'évaluation
- Technical Data Speedmaster CX 75Document2 pagesTechnical Data Speedmaster CX 75fongkiePas encore d'évaluation
- Rim and Face - Alignment KnowledgeDocument19 pagesRim and Face - Alignment Knowledgevj kumarPas encore d'évaluation
- Practical Research 1 Qualitative 2Document112 pagesPractical Research 1 Qualitative 2ZleCerboAtienza100% (3)
- Starbucks and Free TradeDocument9 pagesStarbucks and Free TradeSandraPauwelsPas encore d'évaluation
- Facility Planning - Layout Process 4Document102 pagesFacility Planning - Layout Process 4nouman khan100% (1)
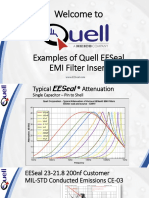
- Examples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsDocument15 pagesExamples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsXto PeregrinPas encore d'évaluation
- EEG383 Measurement - Chapter 2 - Characteristics of Measuring InstrumentsDocument26 pagesEEG383 Measurement - Chapter 2 - Characteristics of Measuring Instrumentsايهاب غزالة100% (1)
- Citrus Fruit ConductionDocument5 pagesCitrus Fruit Conductionapi-349869629Pas encore d'évaluation
- Establishment of A Design Methodology For High-Performance Circuits Based On Automatic Optimization MethodsDocument2 pagesEstablishment of A Design Methodology For High-Performance Circuits Based On Automatic Optimization Methodscatalin85Pas encore d'évaluation
- Local Level Financial Systems: A Study On Three Union at Sylhet Sadar Upazilla in BangladeshDocument10 pagesLocal Level Financial Systems: A Study On Three Union at Sylhet Sadar Upazilla in BangladeshTriple A Research Journal of Social Science and HumanityPas encore d'évaluation
- Lecture Slides: Elementary StatisticsDocument129 pagesLecture Slides: Elementary StatisticsHassan HusseinPas encore d'évaluation
- Geotechnical Engineering - I: B.E. (Civil Engineering) Fourth Semester (C.B.S.)Document2 pagesGeotechnical Engineering - I: B.E. (Civil Engineering) Fourth Semester (C.B.S.)Praveen KumarPas encore d'évaluation
- The Ethics of Consumer Protection & Marketing: Ecture YnopsisDocument6 pagesThe Ethics of Consumer Protection & Marketing: Ecture Ynopsiskuashask2Pas encore d'évaluation
- Reflection On Written AssignmentDocument3 pagesReflection On Written Assignmentapi-302720012Pas encore d'évaluation
- General Manager - Mining / Oil & Gas (Expat)Document4 pagesGeneral Manager - Mining / Oil & Gas (Expat)RajaSyakistPas encore d'évaluation
- SCIENCE and EDUCATION A NEW DIMENSION HUMANITIES and SOCIAL SCIENCE Issue 223Document93 pagesSCIENCE and EDUCATION A NEW DIMENSION HUMANITIES and SOCIAL SCIENCE Issue 223seanewdimPas encore d'évaluation
- TataDocument24 pagesTataNitin MauryaPas encore d'évaluation
- The Green Marketing "Revolution" - Is It WorthDocument12 pagesThe Green Marketing "Revolution" - Is It WorthAndrew SmithPas encore d'évaluation
- Community Health Nursing Course DescriptionDocument1 pageCommunity Health Nursing Course DescriptionMiegan BaluyotPas encore d'évaluation
- A Review of Shankuka's TheoryDocument14 pagesA Review of Shankuka's TheoryrajashreePas encore d'évaluation
- Public Relations vs. Propaganda: Alexandru BASTIANDocument6 pagesPublic Relations vs. Propaganda: Alexandru BASTIANFatima AshrafPas encore d'évaluation
- Belajar Bahasa Spanyol PDFDocument5 pagesBelajar Bahasa Spanyol PDFHimawan PrasojoPas encore d'évaluation
- Happy Learn Haskell Tutorial Vol 1Document243 pagesHappy Learn Haskell Tutorial Vol 1joorcePas encore d'évaluation
- Information Current As of October 2008 Requirements Correspond To 2009-2010 CatalogDocument24 pagesInformation Current As of October 2008 Requirements Correspond To 2009-2010 Catalogpiqueen314Pas encore d'évaluation
- Punjab UNiversity MSC Hons. School Physics ElectronicsDocument41 pagesPunjab UNiversity MSC Hons. School Physics ElectronicsDarrenLovelockPas encore d'évaluation
- Introduction To Marketing ManagementDocument24 pagesIntroduction To Marketing ManagementDrRuchi GargPas encore d'évaluation
- Cobol Batch To Groovy ScriptDocument34 pagesCobol Batch To Groovy ScriptDavid BermudezPas encore d'évaluation
- Human BehaviorDocument14 pagesHuman BehaviorJay Ann AguilarPas encore d'évaluation
- Answers To Case Application Ch1-8Document13 pagesAnswers To Case Application Ch1-8553601750% (2)