Vous aimerez peut-être aussi
- One Page Plan ExampleDocument7 pagesOne Page Plan ExampleBhinitha Chandrasagaran100% (2)
- Chapter 5b Crude Oil Refining ProcessesDocument105 pagesChapter 5b Crude Oil Refining ProcessesBhinitha ChandrasagaranPas encore d'évaluation
- AcetoneDocument31 pagesAcetoneBhinitha Chandrasagaran100% (1)
- Implementation of Pacejka's AnalyticalDocument42 pagesImplementation of Pacejka's AnalyticalRenan AlvesPas encore d'évaluation
- Worktext in Differential EquationsDocument148 pagesWorktext in Differential EquationsJeff MacabitasPas encore d'évaluation
- Marketing Plan SampleDocument11 pagesMarketing Plan Sampleapi-3696958100% (9)
- Production OF Formaldehyde: Oil & Gas Processing TechnologyDocument25 pagesProduction OF Formaldehyde: Oil & Gas Processing TechnologyBhinitha ChandrasagaranPas encore d'évaluation
- Linear Programming IDocument42 pagesLinear Programming IBong NepoPas encore d'évaluation
- Mcgraw Hill Inc Fluid Mechanics and HydrDocument807 pagesMcgraw Hill Inc Fluid Mechanics and Hydrcarinan juliusPas encore d'évaluation
- An Introduction To The Split Step Fourier Method Using MATLABDocument15 pagesAn Introduction To The Split Step Fourier Method Using MATLABHafiz Faiz RasoolPas encore d'évaluation
- Process Control Fundamentals for Continuous OperationsDocument21 pagesProcess Control Fundamentals for Continuous Operationsحاتم غيدان خلفPas encore d'évaluation
- Brand Audit of CadburyDocument38 pagesBrand Audit of CadburyBhinitha ChandrasagaranPas encore d'évaluation
- Types of Reformer Design ExplainedDocument59 pagesTypes of Reformer Design ExplainedMary Scott100% (1)
- Control of Multivariable ProcessesDocument38 pagesControl of Multivariable Processessalvador2mePas encore d'évaluation
- Control of Multiple-Input, Multiple-Output ProcessesDocument38 pagesControl of Multiple-Input, Multiple-Output ProcessespraveenmandePas encore d'évaluation
- Control of Multiple-Input, Multiple-Output ProcessesDocument27 pagesControl of Multiple-Input, Multiple-Output Processesmeseret sisayPas encore d'évaluation
- ProcessDocument38 pagesProcessVaidh Prakash ChoudharyPas encore d'évaluation
- Chapter 18Document31 pagesChapter 18Mahmoud ElsisiPas encore d'évaluation
- Multivariable Control SystemDocument39 pagesMultivariable Control SystemAmeerRashidPas encore d'évaluation
- Multivariable control processes interactions RGADocument39 pagesMultivariable control processes interactions RGAFatin FatehaPas encore d'évaluation
- 72815Document79 pages72815Ayyar KandasamyPas encore d'évaluation
- Control of Multiple-Input, Multiple-Output ProcessesDocument38 pagesControl of Multiple-Input, Multiple-Output ProcessesdhineshpPas encore d'évaluation
- Multiloop and Multivariable Control PDFDocument43 pagesMultiloop and Multivariable Control PDFVaibhav AhujaPas encore d'évaluation
- IJIREEICE8 s9 Pradeep MIMO-PID Controller For 3 Area Power SystemDocument4 pagesIJIREEICE8 s9 Pradeep MIMO-PID Controller For 3 Area Power SystemPradeepKumarMallemPas encore d'évaluation
- Controller Design for Conical Tank Level SystemsDocument6 pagesController Design for Conical Tank Level SystemsAbii BaluuPas encore d'évaluation
- Modeling and Development of Decentralized PI Controller For Nonlinear SystemDocument4 pagesModeling and Development of Decentralized PI Controller For Nonlinear SystemudayPas encore d'évaluation
- OPF BackgroundDocument46 pagesOPF Backgroundalawi747594Pas encore d'évaluation
- WEEK 6 MODULE 6 - Multivariable Control - NEWDocument106 pagesWEEK 6 MODULE 6 - Multivariable Control - NEWmutencoPas encore d'évaluation
- Icad RgaDocument7 pagesIcad Rgaeuzkadi_guipuzkuaPas encore d'évaluation
- JournalNX - DC MicrogridDocument7 pagesJournalNX - DC MicrogridJournalNX - a Multidisciplinary Peer Reviewed JournalPas encore d'évaluation
- On Integral Control in Backstepping: Analysis of Different TechniquesDocument6 pagesOn Integral Control in Backstepping: Analysis of Different TechniquesNors NoorPas encore d'évaluation
- Self-Tuning of Fuzzy Logic Controllers in Cascade LoopsDocument8 pagesSelf-Tuning of Fuzzy Logic Controllers in Cascade LoopsCarlos BellatinPas encore d'évaluation
- Analysis of Active Power Sharing and Synchronization in MultiDG Micro GridDocument6 pagesAnalysis of Active Power Sharing and Synchronization in MultiDG Micro GridAstrid BelloPas encore d'évaluation
- 1 s2.0 S1474667016373025 MainDocument6 pages1 s2.0 S1474667016373025 MainHuỳnh Thanh ĐôPas encore d'évaluation
- Virtual Impedance Alpha BetaDocument8 pagesVirtual Impedance Alpha BetaBeshoy AbdouPas encore d'évaluation
- AGC Modelado Simulación IndiaDocument11 pagesAGC Modelado Simulación IndiacastrojpPas encore d'évaluation
- Accounting of DC DC Power Converter Dynamics in DC Motor Velocity Adaptive ControlDocument7 pagesAccounting of DC DC Power Converter Dynamics in DC Motor Velocity Adaptive ControlFinito TheEndPas encore d'évaluation
- Particle Swarm-Based Sliding Mode Controller With Chattering Reduction Feature: Application To An AGC Nonlinear Interconnected ModelDocument26 pagesParticle Swarm-Based Sliding Mode Controller With Chattering Reduction Feature: Application To An AGC Nonlinear Interconnected ModelShadvala SebastianPas encore d'évaluation
- Centralized and Decentralized of Quadruple Tank Process: P.Srinivasarao P.SubbaiahDocument9 pagesCentralized and Decentralized of Quadruple Tank Process: P.Srinivasarao P.SubbaiahIvan BevandaPas encore d'évaluation
- Multi-Model Control of Nonlinear Systems Using Closed-Loop Gap MetricDocument5 pagesMulti-Model Control of Nonlinear Systems Using Closed-Loop Gap MetricAhmed TaharPas encore d'évaluation
- 656 OrtegaDocument6 pages656 OrtegaAnonymous WkbmWCa8MPas encore d'évaluation
- Robust Control (/sliding Mode Controller) With An Application To Multi-Input Power System StabilisationDocument9 pagesRobust Control (/sliding Mode Controller) With An Application To Multi-Input Power System StabilisationSherif HelmyPas encore d'évaluation
- Process ControlDocument20 pagesProcess Controlgongweejie100% (1)
- Ei6801 - Computer Control of Process Part-A Answer All Questions (5x2 10)Document7 pagesEi6801 - Computer Control of Process Part-A Answer All Questions (5x2 10)Anonymous yO7rcec6vuPas encore d'évaluation
- Transition Between Grid-Connected Mode and Islanded Mode in VSI-fed MicrogridsDocument12 pagesTransition Between Grid-Connected Mode and Islanded Mode in VSI-fed MicrogridsSarwar Hosen SimonPas encore d'évaluation
- Kim 2011Document13 pagesKim 2011Eman TarekPas encore d'évaluation
- Modeling, Control and Testing of A Voltage-Source-Inverter-Based MicrogridDocument6 pagesModeling, Control and Testing of A Voltage-Source-Inverter-Based MicrogridMitesh GandhiPas encore d'évaluation
- Design of Static and Dynamic DecouplerDocument6 pagesDesign of Static and Dynamic DecouplerAli AlmisbahPas encore d'évaluation
- UMP Chemical Engineering Final Exam Questions Cover Process Control, Heat Exchanger ModelingDocument5 pagesUMP Chemical Engineering Final Exam Questions Cover Process Control, Heat Exchanger Modelingmustaf mohamedPas encore d'évaluation
- E3sconf SeFet2019 01012Document4 pagesE3sconf SeFet2019 01012dolaPas encore d'évaluation
- E3sconf SeFet2019 01012 PDFDocument4 pagesE3sconf SeFet2019 01012 PDFdolaPas encore d'évaluation
- 954f7108-0f64-4170-b07c-dd61d762856aDocument14 pages954f7108-0f64-4170-b07c-dd61d762856aSupriya Gowda100% (1)
- Fuzzy Self Tuning of PID Controller For Multivariable ProcessDocument5 pagesFuzzy Self Tuning of PID Controller For Multivariable ProcessJournal of ComputingPas encore d'évaluation
- 1 PBDocument10 pages1 PBaasfklPas encore d'évaluation
- Process Dynamics and Control - IntroductionDocument35 pagesProcess Dynamics and Control - IntroductionMarie Angeline BautistaPas encore d'évaluation
- Scaling Factor Tuning of Fuzzy Logic Controller For Load Frequency Control Using Particle Swarm Optimization Technique - IndiaDocument10 pagesScaling Factor Tuning of Fuzzy Logic Controller For Load Frequency Control Using Particle Swarm Optimization Technique - IndiagaviotasilvestrePas encore d'évaluation
- Underactuated Mechanical SystemsDocument16 pagesUnderactuated Mechanical SystemsVictor PassosPas encore d'évaluation
- Simultaneous Closed-Loop Automatic Tuning Method For Cascade ControllersDocument8 pagesSimultaneous Closed-Loop Automatic Tuning Method For Cascade ControllersAl-ShukaPas encore d'évaluation
- Study On Interleaved Three Switch Buck Boost Converters With Co Directional Coupling InductorDocument11 pagesStudy On Interleaved Three Switch Buck Boost Converters With Co Directional Coupling Inductorbilalshahid2338Pas encore d'évaluation
- Introduction To Process ControlDocument28 pagesIntroduction To Process ControlFajar AdityadarmaPas encore d'évaluation
- 2016 NapsDocument5 pages2016 NapsAli AzanPas encore d'évaluation
- Dynamic Stability of A Microgrid With An Active LoadDocument13 pagesDynamic Stability of A Microgrid With An Active LoadAhmed WestministerPas encore d'évaluation
- Advanced Control of A Reverse Osmosis de PDFDocument7 pagesAdvanced Control of A Reverse Osmosis de PDFfet tommPas encore d'évaluation
- The Investigations of Command Shaping PDFDocument7 pagesThe Investigations of Command Shaping PDFVignesh RamakrishnanPas encore d'évaluation
- Switching Function Design For Output Voltage Tracking in The DC DC Buck Power ConverterDocument14 pagesSwitching Function Design For Output Voltage Tracking in The DC DC Buck Power ConverterKaritonovh MarquezPas encore d'évaluation
- Finn Haugen: Cascade control improves disturbance compensationDocument15 pagesFinn Haugen: Cascade control improves disturbance compensationVivaldi KhathamiPas encore d'évaluation
- Design and Simulation of A Neural Controller For MIMO SystemsDocument11 pagesDesign and Simulation of A Neural Controller For MIMO SystemsJulio Cesar SoSaavedraPas encore d'évaluation
- Load Frequency Control in Single Area System Using Model Predictive Control and Linear Quadratic Gaussian TechniquesDocument4 pagesLoad Frequency Control in Single Area System Using Model Predictive Control and Linear Quadratic Gaussian TechniquesAkshay RohanPas encore d'évaluation
- Review of Primary Voltage and FrequencyDocument11 pagesReview of Primary Voltage and FrequencyDeepak GehlotPas encore d'évaluation
- 10.1002@asjc.2021Document11 pages10.1002@asjc.2021hamidamza4Pas encore d'évaluation
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationD'EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationPas encore d'évaluation
- EDTA METHOD (Sulphate)Document2 pagesEDTA METHOD (Sulphate)Bhinitha Chandrasagaran100% (1)
- Customer-perceived value analysis reveals strengths and weaknessesDocument3 pagesCustomer-perceived value analysis reveals strengths and weaknessesBhinitha ChandrasagaranPas encore d'évaluation
- EDTA METHOD (Sulphate)Document2 pagesEDTA METHOD (Sulphate)Bhinitha Chandrasagaran100% (1)
- Catalytic Reforming - Assignment 2Document17 pagesCatalytic Reforming - Assignment 2Bhinitha ChandrasagaranPas encore d'évaluation
- BransDocument10 pagesBransBhinitha ChandrasagaranPas encore d'évaluation
- Concentrating Collector Serkan KapucuDocument43 pagesConcentrating Collector Serkan KapucuNikhil RaiPas encore d'évaluation
- Concentrating Collector Serkan KapucuDocument43 pagesConcentrating Collector Serkan KapucuNikhil RaiPas encore d'évaluation
- Opec and Oecd: Bhinitha Chandrasagaran KKE 18005Document9 pagesOpec and Oecd: Bhinitha Chandrasagaran KKE 18005Bhinitha ChandrasagaranPas encore d'évaluation
- ProjectDocument13 pagesProjectBhinitha ChandrasagaranPas encore d'évaluation
- Catalytic Cracking: Farah Nadiah Binti Sidek KKE 18004Document8 pagesCatalytic Cracking: Farah Nadiah Binti Sidek KKE 18004Bhinitha ChandrasagaranPas encore d'évaluation
- Titan Watches - Brand RepositioningDocument59 pagesTitan Watches - Brand RepositioningShashikala97% (35)
- ProjectDocument13 pagesProjectBhinitha ChandrasagaranPas encore d'évaluation
- Project AcetoneDocument19 pagesProject AcetoneBhinitha ChandrasagaranPas encore d'évaluation
- Deinking by Washing Experiment: Objective: Understand The Effect of Washing On Recycled NewsprintDocument3 pagesDeinking by Washing Experiment: Objective: Understand The Effect of Washing On Recycled NewsprintBhinitha ChandrasagaranPas encore d'évaluation
- Chapter - 5 MKK1263 NH STDDocument28 pagesChapter - 5 MKK1263 NH STDBhinitha ChandrasagaranPas encore d'évaluation
- Chapter - 3 MKK1263 NH STDDocument36 pagesChapter - 3 MKK1263 NH STDBhinitha ChandrasagaranPas encore d'évaluation
- KKW Towards Its Ramsar StatusDocument28 pagesKKW Towards Its Ramsar StatusBhinitha ChandrasagaranPas encore d'évaluation
- Chapter - 4 MKK1263 NH STDDocument16 pagesChapter - 4 MKK1263 NH STDBhinitha ChandrasagaranPas encore d'évaluation
- Minamata Disease - Water PollutionDocument19 pagesMinamata Disease - Water PollutionBhinitha ChandrasagaranPas encore d'évaluation
- Heavy Metal RemovalDocument4 pagesHeavy Metal RemovalBhinitha ChandrasagaranPas encore d'évaluation
- 1 s2.0 S1385894709003246 Main PDFDocument8 pages1 s2.0 S1385894709003246 Main PDFBhinitha ChandrasagaranPas encore d'évaluation
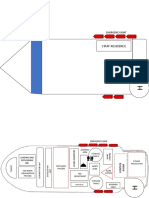
- Staff Residence: Emergency BoatDocument5 pagesStaff Residence: Emergency BoatBhinitha ChandrasagaranPas encore d'évaluation
- SLG 2.5.2 Scale Transformations 2Document8 pagesSLG 2.5.2 Scale Transformations 2Joh TayagPas encore d'évaluation
- Pinns - 1dheatequationexample: 1 OverviewDocument30 pagesPinns - 1dheatequationexample: 1 OverviewHari Madhavan Krishna KumarPas encore d'évaluation
- GENMATH - Week 6&7Document6 pagesGENMATH - Week 6&7Crizza LorainePas encore d'évaluation
- Laplace InverseDocument3 pagesLaplace InversemarwanPas encore d'évaluation
- WMA01 01 Que 20150113 PDFDocument44 pagesWMA01 01 Que 20150113 PDFmunzarinPas encore d'évaluation
- Mathematics Resource Package: Quarter IiDocument8 pagesMathematics Resource Package: Quarter IiLourdes de JesusPas encore d'évaluation
- Jee Math 9th Jan Shift2Document15 pagesJee Math 9th Jan Shift2Ilir HoxhaPas encore d'évaluation
- ImoDocument3 pagesImosiddumittePas encore d'évaluation
- Theories of Ostwald Ripening and Their ApplicationsDocument32 pagesTheories of Ostwald Ripening and Their ApplicationsElla AwaltanovaPas encore d'évaluation
- Lesson 4.1 - Solving Systems by GraphingDocument14 pagesLesson 4.1 - Solving Systems by GraphingnanalagappanPas encore d'évaluation
- BAC-note Za Corr & RegrDocument26 pagesBAC-note Za Corr & RegrEnock MaunyaPas encore d'évaluation
- 0 - Introduction PDFDocument3 pages0 - Introduction PDFDan EnzerPas encore d'évaluation
- Potential FlowDocument11 pagesPotential Flowzero lift100% (2)
- Maharashtra-Mathematics Algebra Sample Paper-1-Class 10 Question PaperDocument2 pagesMaharashtra-Mathematics Algebra Sample Paper-1-Class 10 Question PaperFirdosh Khan100% (1)
- Rubber TechDocument35 pagesRubber TechThang CaoPas encore d'évaluation
- Physics ProjectDocument9 pagesPhysics Projectapi-227406051Pas encore d'évaluation
- DE For EEDocument6 pagesDE For EEPaul Simon NacisPas encore d'évaluation
- 6 e CH 27Document15 pages6 e CH 27Xmean NegativePas encore d'évaluation
- 3.1 3.4 3.5 Buku WeiDocument2 pages3.1 3.4 3.5 Buku WeiMaritaNadyahPas encore d'évaluation
- Sensors 21 02453Document18 pagesSensors 21 02453Sérgio CustódioPas encore d'évaluation
- 9781921972089Document8 pages9781921972089eibsourcePas encore d'évaluation
- Benchmarking The Collocation Stand-Alone Library and Toolkit (CSALT)Document7 pagesBenchmarking The Collocation Stand-Alone Library and Toolkit (CSALT)Yandex TagarPas encore d'évaluation
- Rational Functions LessonDocument4 pagesRational Functions LessonAcire NonacPas encore d'évaluation