Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Modular Compact Rheometers: MCR 72 MCR 92Document7 pagesModular Compact Rheometers: MCR 72 MCR 92Tank TopPas encore d'évaluation
- Tutorials On Bohrs TheoryDocument2 pagesTutorials On Bohrs TheorySukhwinder Singh GillPas encore d'évaluation
- Short Circuit Current Calculation of DG Synch Panel 1-6-14Document3 pagesShort Circuit Current Calculation of DG Synch Panel 1-6-14Aerielle DesameroPas encore d'évaluation
- Uee Bits PDFDocument18 pagesUee Bits PDFSurapu.Sri ganeshPas encore d'évaluation
- PhysicsDocument4 pagesPhysicsKhurshaid AhmadPas encore d'évaluation
- 140344Document125 pages140344Dawit AwashPas encore d'évaluation
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityMohitSathwara 2609Pas encore d'évaluation
- A Review Paper On Techniques and Design For Metamaterial AbsorberDocument5 pagesA Review Paper On Techniques and Design For Metamaterial AbsorberPratik AvhadPas encore d'évaluation
- Strength of Materials (HE 306)Document463 pagesStrength of Materials (HE 306)Anu ParameswaranPas encore d'évaluation
- Important MCQ - Magnetism and ElectromagnetismDocument12 pagesImportant MCQ - Magnetism and ElectromagnetismNaman ChauhanPas encore d'évaluation
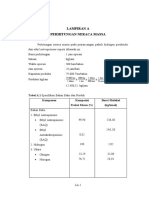
- Neraca MassaDocument38 pagesNeraca MassaGunPas encore d'évaluation
- Quiz 3 ReviewDocument26 pagesQuiz 3 ReviewameliawendelPas encore d'évaluation
- A Lifting Line Theory For A Three-Dimensional Hydrofoil: Hui Liang and Zhi ZongDocument7 pagesA Lifting Line Theory For A Three-Dimensional Hydrofoil: Hui Liang and Zhi ZongKoShweBaPas encore d'évaluation
- 24 04 11 PDFDocument6 pages24 04 11 PDFMostafaPas encore d'évaluation
- Analysis of Residual Stresses and Distortions in T Joint Fillet WeldsDocument16 pagesAnalysis of Residual Stresses and Distortions in T Joint Fillet WeldsDebabrata PodderPas encore d'évaluation
- Spreading Dynamics of Polymer Nanodroplets: Sandia National Laboratories, Albuquerque, New Mexico 87185, USADocument10 pagesSpreading Dynamics of Polymer Nanodroplets: Sandia National Laboratories, Albuquerque, New Mexico 87185, USAmh123456789Pas encore d'évaluation
- Emulsions Questions and AnswersDocument3 pagesEmulsions Questions and AnswersAhmad FarhanPas encore d'évaluation
- 1 Exe3 SolDocument2 pages1 Exe3 SolTarak BENSLIMANEPas encore d'évaluation
- ChemDocument4 pagesChemdebabrata_nagPas encore d'évaluation
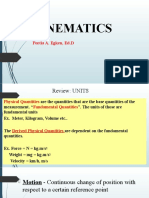
- General Physics 1 KinematicsDocument62 pagesGeneral Physics 1 KinematicsPortia Egken100% (1)
- Convection Heat TransferDocument49 pagesConvection Heat TransferAli almansouriPas encore d'évaluation
- Bulging Modes of Circular Bottom Plates in Rigid Cylindrical Containers Filled With A LiquidDocument19 pagesBulging Modes of Circular Bottom Plates in Rigid Cylindrical Containers Filled With A LiquidrodrigoperezsimonePas encore d'évaluation
- P. G. Francis (Auth.) - Mathematics For ChemisDocument202 pagesP. G. Francis (Auth.) - Mathematics For Chemisjunaid0% (1)
- Dalton's Law of Partial PressureDocument19 pagesDalton's Law of Partial PressureAbdur RehmanPas encore d'évaluation
- Crystal Field PotentialDocument3 pagesCrystal Field PotentialDubhe3Pas encore d'évaluation
- PhysicsDocument18 pagesPhysicsNelsonPas encore d'évaluation
- Orbital Parameters of Satellite by Karan Singh PariharDocument21 pagesOrbital Parameters of Satellite by Karan Singh Pariharkaran singh pariharPas encore d'évaluation
- Exploring Science International ContentsDocument4 pagesExploring Science International ContentsR S67% (6)
- Self Assembled MonolayersDocument64 pagesSelf Assembled MonolayersPraveen KumarPas encore d'évaluation
- York Chilers EngDocument10 pagesYork Chilers EngBulclimaPas encore d'évaluation