Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Plano 236D PDFDocument27 pagesPlano 236D PDFArle SalasPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
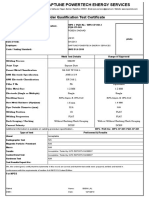
- Welder Qualification Test Certificate: Weld Test Details Range of ApprovalDocument1 pageWelder Qualification Test Certificate: Weld Test Details Range of ApprovalRamkunwar YadavPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- RCE World Rallycross Championship 2014 New PDFDocument40 pagesRCE World Rallycross Championship 2014 New PDFAnita DiazPas encore d'évaluation
- ENG 046 CVVT OCV InspectionDocument5 pagesENG 046 CVVT OCV Inspectionpacosworld100% (1)
- Correcting Linear Intonation On The TromboneDocument93 pagesCorrecting Linear Intonation On The TrombonePatrik ArvhultPas encore d'évaluation
- Dynamic Oring SealingDocument49 pagesDynamic Oring SealingRobert ChristoPas encore d'évaluation
- Pressure Purging Case 1 Nitrogen Requirement For Pressure Purging Case 1Document1 pagePressure Purging Case 1 Nitrogen Requirement For Pressure Purging Case 1BalasubramanianPas encore d'évaluation
- 36 504 Welding of High Pressure Temperature Tube and Pipework RevDocument40 pages36 504 Welding of High Pressure Temperature Tube and Pipework Revmanojballa100% (1)
- DEM Modelling of Liner Evolution and Its Influence On Grinding Rate in Ball MillsDocument11 pagesDEM Modelling of Liner Evolution and Its Influence On Grinding Rate in Ball MillsAlex vilcaPas encore d'évaluation
- Chapter 15 Hydraulic Subsurface Pumps 1987 Developments in Petroleum ScienceDocument102 pagesChapter 15 Hydraulic Subsurface Pumps 1987 Developments in Petroleum ScienceFalokid RaboPas encore d'évaluation
- Fai Filtri Oil Filter Codes PDFDocument8 pagesFai Filtri Oil Filter Codes PDFSebastian GanciPas encore d'évaluation
- 1E48F-E EngineDocument31 pages1E48F-E EnginePatrik ArvhultPas encore d'évaluation
- Electone B5CREDocument31 pagesElectone B5CREPatrik ArvhultPas encore d'évaluation
- Ds 28vin Micro FamilyDocument11 pagesDs 28vin Micro FamilyPatrik ArvhultPas encore d'évaluation
- Process Equipment in Petroleum RefiningDocument2 pagesProcess Equipment in Petroleum RefiningKaify ScorpionPas encore d'évaluation
- Ps-1 Unit 3Document21 pagesPs-1 Unit 3Prathap VuyyuruPas encore d'évaluation
- Corr BHELDocument32 pagesCorr BHELDGM BoilerPas encore d'évaluation
- Psychrometry of Air Conditioning ProcessDocument56 pagesPsychrometry of Air Conditioning ProcessNazia ZamanPas encore d'évaluation
- Centrifugal BlowerDocument3 pagesCentrifugal BlowerVicy gostPas encore d'évaluation
- A320-Mel-Cdl-Cdd StatusDocument18 pagesA320-Mel-Cdl-Cdd StatusvproPas encore d'évaluation
- Parts Catalogue 527114408 - ENDocument230 pagesParts Catalogue 527114408 - ENNiko BabinetsPas encore d'évaluation
- Spin Top CycloneDocument2 pagesSpin Top CyclonegshdavidPas encore d'évaluation
- Compressor/Vacuum Pumps For Liquid Waste Tankers: Truck SeriesDocument4 pagesCompressor/Vacuum Pumps For Liquid Waste Tankers: Truck Seriessourov mutsuddyPas encore d'évaluation
- Las2 PSDocument1 pageLas2 PSlukewendellrPas encore d'évaluation
- Especificaciones de Rectificadora de CigueñalDocument10 pagesEspecificaciones de Rectificadora de CigueñalCR OtinianoPas encore d'évaluation
- Actuadores Leslie de DiafragmaDocument17 pagesActuadores Leslie de DiafragmaJamesTorresPalmaPas encore d'évaluation
- Experimentalmechanics (1) UnlockedDocument127 pagesExperimentalmechanics (1) UnlockeddivyaPas encore d'évaluation
- DTC 17501 - P1093 - 004243Document1 pageDTC 17501 - P1093 - 004243JuanLopez64ChPas encore d'évaluation
- Energy TransportDocument16 pagesEnergy TransportSarun NeamnomPas encore d'évaluation
- 11 111i 11III11l11111m1: Iiii LllllliDocument46 pages11 111i 11III11l11111m1: Iiii LllllliNashrul AfiqPas encore d'évaluation
- Modeling An Air-Cooled Gas Turbine of The Integrated Gasification Combined Cycle in Aspen PlusDocument6 pagesModeling An Air-Cooled Gas Turbine of The Integrated Gasification Combined Cycle in Aspen Plusdafer_daniPas encore d'évaluation
- Three-Phase Electric Motor: General Information FileDocument66 pagesThree-Phase Electric Motor: General Information FileJacob SánchezPas encore d'évaluation
- Analysis of Balsa Wood Bridge ModelsDocument28 pagesAnalysis of Balsa Wood Bridge ModelsHazem EmamPas encore d'évaluation