Vous aimerez peut-être aussi
- Resumao de Derivadas Do Responde AiDocument8 pagesResumao de Derivadas Do Responde AiKaciane MarquesPas encore d'évaluation
- 3prova Numeros 2017Document1 page3prova Numeros 2017Vitorio Gauss SilvaPas encore d'évaluation
- Resumo - Direito Civil II - Das ObrigaçõesDocument24 pagesResumo - Direito Civil II - Das ObrigaçõeslucasPas encore d'évaluation
- Educação AmbientalDocument8 pagesEducação AmbientalVitorio Gauss SilvaPas encore d'évaluation
- Revista05 60 PDFDocument6 pagesRevista05 60 PDFVitorio Gauss SilvaPas encore d'évaluation
- Juliana de Oliveira FiorelliDocument72 pagesJuliana de Oliveira FiorelliVitorio Gauss SilvaPas encore d'évaluation
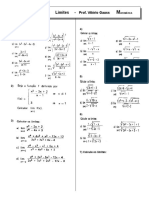
- Lista 2 LimitesDocument3 pagesLista 2 LimitesVitorio Gauss SilvaPas encore d'évaluation
- 04 Geral 2017Document11 pages04 Geral 2017Vitorio Gauss SilvaPas encore d'évaluation
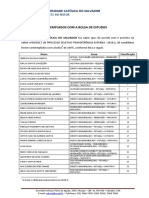
- Contemplados Com A Bolsa de 100Document2 pagesContemplados Com A Bolsa de 100Vitorio Gauss SilvaPas encore d'évaluation
- Lista de Geometria IntensivoDocument19 pagesLista de Geometria IntensivoVitorio Gauss SilvaPas encore d'évaluation
- 05 Funções TrigonométricasDocument4 pages05 Funções TrigonométricasVitorio Gauss SilvaPas encore d'évaluation
- 4 LHospitalDocument15 pages4 LHospitalSandro DiasPas encore d'évaluation
- Extremos de Funcoes - MAT 140 - 2015-IIDocument33 pagesExtremos de Funcoes - MAT 140 - 2015-IIFabio DelanoPas encore d'évaluation
- Lista 1 2019 LimitesDocument3 pagesLista 1 2019 LimitesVitorio Gauss SilvaPas encore d'évaluation
- Limites Envolvendo Infinitos Resumido PDFDocument5 pagesLimites Envolvendo Infinitos Resumido PDFIanca SilvaPas encore d'évaluation
- Limit EsDocument4 pagesLimit EsVitorio Gauss SilvaPas encore d'évaluation
- 08 LimitesDocument7 pages08 LimitesVitorio Gauss SilvaPas encore d'évaluation
- Enem Por Assunto 1998 2015 DVD 1Document165 pagesEnem Por Assunto 1998 2015 DVD 1LILIAPas encore d'évaluation
- Ftrig2009tarde PDFDocument3 pagesFtrig2009tarde PDFVitorio Gauss SilvaPas encore d'évaluation
- Material 06Document6 pagesMaterial 06Vitorio Gauss SilvaPas encore d'évaluation
- Lista 4 EENDocument10 pagesLista 4 EENVitorio Gauss SilvaPas encore d'évaluation
- Calculo1 Aula13Document3 pagesCalculo1 Aula13Vitorio Gauss SilvaPas encore d'évaluation
- Enem Por Assunto 1998 2015 DVD 1Document165 pagesEnem Por Assunto 1998 2015 DVD 1LILIAPas encore d'évaluation
- Elo Integral 1Document2 pagesElo Integral 1Vitorio Gauss SilvaPas encore d'évaluation
- Limites Indeterminados e Regras de L' HospitalDocument9 pagesLimites Indeterminados e Regras de L' HospitalRil SilvaPas encore d'évaluation
- Gabarito CPAEN 2018Document7 pagesGabarito CPAEN 2018Vitorio Gauss SilvaPas encore d'évaluation
- Gabarito CPAEN 2018Document2 pagesGabarito CPAEN 2018Vitorio Gauss SilvaPas encore d'évaluation
- Aula 00 CONTAB GERALDocument20 pagesAula 00 CONTAB GERALAndré JuniorPas encore d'évaluation
- Gabarito CPAEN 2018Document2 pagesGabarito CPAEN 2018Vitorio Gauss SilvaPas encore d'évaluation
- Manual Aspirador Electronia BST-803 Calipso - 3117828Document16 pagesManual Aspirador Electronia BST-803 Calipso - 3117828Selenita VoshinPas encore d'évaluation
- Mapa de Risco Banco CentralDocument3 pagesMapa de Risco Banco Centralagislayne pargaPas encore d'évaluation
- #6 Construção de MASMORRAS 1 PGDocument1 page#6 Construção de MASMORRAS 1 PGLIE glcPas encore d'évaluation
- Gabarito Ae1 História 8º AnoDocument9 pagesGabarito Ae1 História 8º AnoAntonio Correia100% (3)
- Apostila Fazendo Seu Dicionario de AcordesDocument8 pagesApostila Fazendo Seu Dicionario de AcordesNelson PedonPas encore d'évaluation
- Modelos de LaudosDocument6 pagesModelos de Laudoswillams AlvesPas encore d'évaluation
- Master BIM - IPOGDocument20 pagesMaster BIM - IPOGGrover FmzPas encore d'évaluation
- Relatório de EstagioDocument14 pagesRelatório de EstagioCastro Naldo0% (1)
- Boletim Técnico Textura DesignerDocument3 pagesBoletim Técnico Textura DesignerGabriel AvelinoPas encore d'évaluation
- Brinquedos PedagogicosDocument40 pagesBrinquedos PedagogicosCleonice OliveiraPas encore d'évaluation
- MÁQUINA: D560 / D760: Corrente Tensão Corrente Qm1 Fator Ajuste Ajuste Qm1 Potência M1 Corrente M1 Potência Cabo EntradaDocument162 pagesMÁQUINA: D560 / D760: Corrente Tensão Corrente Qm1 Fator Ajuste Ajuste Qm1 Potência M1 Corrente M1 Potência Cabo EntradaRoger RochaPas encore d'évaluation
- Plano de Ensino PDFDocument3 pagesPlano de Ensino PDFIdna AlencarPas encore d'évaluation
- Como Reproduzir Orquídeas Facilmente em Casa - Keikis, Estacas e BulbosDocument12 pagesComo Reproduzir Orquídeas Facilmente em Casa - Keikis, Estacas e BulbosfegenoliPas encore d'évaluation
- Catalogo de Propriedades Termicas de Paredes e CoberturasDocument13 pagesCatalogo de Propriedades Termicas de Paredes e CoberturasIsrael BrazPas encore d'évaluation
- Vamos Juntos! Notas de Um Contraturno Escolar para (Re) Significação Da Educação Básica (Capítulo de Livro)Document10 pagesVamos Juntos! Notas de Um Contraturno Escolar para (Re) Significação Da Educação Básica (Capítulo de Livro)João PauloPas encore d'évaluation
- Aula 0 - Equipamentos PDFDocument6 pagesAula 0 - Equipamentos PDFPaulo VitorPas encore d'évaluation
- A Importância Da SeletividadeDocument5 pagesA Importância Da SeletividadeSergio Ricardo NobrePas encore d'évaluation
- Fichas: Texto PublicitárioDocument3 pagesFichas: Texto Publicitárioanon_1271374050% (1)
- Atividade TOC TOCDocument2 pagesAtividade TOC TOCSr RamosPas encore d'évaluation
- Vaesen (101-155) en PTDocument55 pagesVaesen (101-155) en PT- Th3K1ngPas encore d'évaluation
- Produção de Conteúdo para Audiência CriativaDocument17 pagesProdução de Conteúdo para Audiência CriativaJoão Paulo HergeselPas encore d'évaluation
- Texto Empuxo e Principio de ArquimedesDocument5 pagesTexto Empuxo e Principio de ArquimedesAlberto MaiaPas encore d'évaluation
- Aquecimento de Ar - PalleyDocument10 pagesAquecimento de Ar - Palleyusuaruio_epPas encore d'évaluation
- Formação Serviço AlentejoDocument125 pagesFormação Serviço AlentejoCrisPas encore d'évaluation
- NBR 5858 - 1983Document15 pagesNBR 5858 - 1983telnet837Pas encore d'évaluation
- Artigo - Utilizar No Trabalho de FundaçõesDocument7 pagesArtigo - Utilizar No Trabalho de FundaçõesBruno PerozaPas encore d'évaluation
- DestilacaoDocument6 pagesDestilacaoMartinõ MarcellPas encore d'évaluation
- Despesas CaiãoDocument6 pagesDespesas CaiãoCaio VitalPas encore d'évaluation
- Portaria 218 2015 23jul CContasDocument22 pagesPortaria 218 2015 23jul CContasJorge FranciscoPas encore d'évaluation
- Marvel RPGDocument6 pagesMarvel RPGChaulin Diogo da CostaPas encore d'évaluation