Vous aimerez peut-être aussi
- 28 Eliwell EWDR905Document4 pages28 Eliwell EWDR905dawitPas encore d'évaluation
- APL5932A/B/C/D: Features General DescriptionDocument18 pagesAPL5932A/B/C/D: Features General DescriptionLeonardo FleiPas encore d'évaluation
- 34 Atmel Atmega32a PDFDocument352 pages34 Atmel Atmega32a PDFMuhammad UsmanPas encore d'évaluation
- ADTEK Flow Totalizer IndicatorDocument12 pagesADTEK Flow Totalizer Indicatormsaadi717Pas encore d'évaluation
- 38 Champion CM6901 PDFDocument15 pages38 Champion CM6901 PDFcarlosgnPas encore d'évaluation
- FA5331P (M) /FA5332P (M) : Description Dimensions, MM SOP-16Document13 pagesFA5331P (M) /FA5332P (M) : Description Dimensions, MM SOP-16Ikram BalochPas encore d'évaluation
- 28 Eliwell IC912LXDocument14 pages28 Eliwell IC912LXsherwinduePas encore d'évaluation
- LM342 Series 3-Terminal Positive Regulators: General DescriptionDocument6 pagesLM342 Series 3-Terminal Positive Regulators: General DescriptionДрагиша Небитни ТрифуновићPas encore d'évaluation
- 38 LD7531 PDFDocument18 pages38 LD7531 PDFJessica JhonPas encore d'évaluation
- FAP-IIA Series: N-Channel MOS-FETDocument2 pagesFAP-IIA Series: N-Channel MOS-FETNelson CabingasPas encore d'évaluation
- 31 Shindengen D3SBA60Document6 pages31 Shindengen D3SBA60Haze Garcia HechanovaPas encore d'évaluation
- Serially Interfaced, 8-Digit LED Display Drivers: General Description FeaturesDocument16 pagesSerially Interfaced, 8-Digit LED Display Drivers: General Description FeaturesHebertAlexMamaniSalomaPas encore d'évaluation
- TRD-J Series Incremental EncodersDocument5 pagesTRD-J Series Incremental EncodersNguyen QuangPas encore d'évaluation
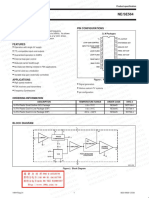
- Se, Ne564Document9 pagesSe, Ne564Muhammad Ismail ZahidPas encore d'évaluation
- Speed Control PanasonicDocument17 pagesSpeed Control PanasonicnaufalPas encore d'évaluation
- Description Dimensions, MM SOP-8: Cmos Ic For Switching Power Supply ControlDocument15 pagesDescription Dimensions, MM SOP-8: Cmos Ic For Switching Power Supply ControlMalfo10Pas encore d'évaluation
- At89c52 PDFDocument23 pagesAt89c52 PDFSửa Máy Cnc LoinguyenPas encore d'évaluation
- PC923 PDFDocument6 pagesPC923 PDFHassan QurbanPas encore d'évaluation
- MaxDocument19 pagesMaxWaltencir SoutoPas encore d'évaluation
- Thermal Circuit BreakerxxxxDocument2 pagesThermal Circuit BreakerxxxxYanuar AndriyantoPas encore d'évaluation
- 36 Lattice Gal18v10Document14 pages36 Lattice Gal18v10HelloPas encore d'évaluation
- Precision, 4-Channel/Dual 2-Channel, Low-Voltage, CMOS Analog MultiplexersDocument12 pagesPrecision, 4-Channel/Dual 2-Channel, Low-Voltage, CMOS Analog MultiplexersImran RiazPas encore d'évaluation
- 15 AdamDocument22 pages15 AdamMuhammad Ahsan AkramPas encore d'évaluation
- 38 Fairchild Ka5l0380rydtuDocument20 pages38 Fairchild Ka5l0380rydtumehranPas encore d'évaluation
- 05 Panasonic Kge, KBP, KRPDocument9 pages05 Panasonic Kge, KBP, KRPCarlos CuboPas encore d'évaluation
- 34 WCH CH340GDocument6 pages34 WCH CH340GProfesor RosokPas encore d'évaluation
- General Purpose NPN Transistor Array Features: Data Sheet May 2001 File Number 341.5Document5 pagesGeneral Purpose NPN Transistor Array Features: Data Sheet May 2001 File Number 341.5EFranPas encore d'évaluation
- Aluminium Electrolytic Capacitors Power Economic Screw Terminals 154/155 PEC-STDocument9 pagesAluminium Electrolytic Capacitors Power Economic Screw Terminals 154/155 PEC-STbadit991Pas encore d'évaluation
- Fuji TR-Series Thermal Overload RelaysDocument12 pagesFuji TR-Series Thermal Overload RelayscoronaqcPas encore d'évaluation
- Viper50/Sp Viper50A/Asp: Smps Primary I.CDocument23 pagesViper50/Sp Viper50A/Asp: Smps Primary I.Camd reePas encore d'évaluation
- SICONT Limit Switches: Type 3SE3 Upto 500 VAC, 600 VDC, 10ADocument12 pagesSICONT Limit Switches: Type 3SE3 Upto 500 VAC, 600 VDC, 10AlivioPas encore d'évaluation
- 33 Ti Tpa6111a2Document27 pages33 Ti Tpa6111a2Kamol PlakulPas encore d'évaluation
- L1117LDocument10 pagesL1117Lap16484Pas encore d'évaluation
- Seven Band Graphic Equalizer Data Sheet: Description FeaturesDocument4 pagesSeven Band Graphic Equalizer Data Sheet: Description Featurestruong mai vanPas encore d'évaluation
- Songle 12v RelayDocument2 pagesSongle 12v Relayanas alsatyPas encore d'évaluation
- Relays Solenoids: Plug-In Interface DC To DC Solid State RelaysDocument1 pageRelays Solenoids: Plug-In Interface DC To DC Solid State RelaysEsteban SanchezPas encore d'évaluation
- 37 S29GL P PDFDocument80 pages37 S29GL P PDFSamvel YesayanPas encore d'évaluation
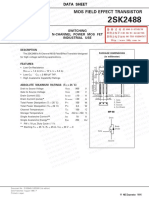
- Mos Field Effect Transistor: Switching N-Channel Power Mos Fet Industrial UseDocument8 pagesMos Field Effect Transistor: Switching N-Channel Power Mos Fet Industrial Usejjtrivedi8717Pas encore d'évaluation
- Switching Regulator Controller: ASSP For Power Management ApplicationsDocument26 pagesSwitching Regulator Controller: ASSP For Power Management ApplicationsAZRA comPas encore d'évaluation
- 34 Intel 8752BH PDFDocument21 pages34 Intel 8752BH PDFSửa Máy Cnc LoinguyenPas encore d'évaluation
- For General Audio Use 11 W 2-Channel BTL AF Power Amplifier: Package DimensionsDocument3 pagesFor General Audio Use 11 W 2-Channel BTL AF Power Amplifier: Package DimensionsEduardoEj-DjOlaecheaPas encore d'évaluation
- Philips CapacitorDocument3 pagesPhilips Capacitorbadit991Pas encore d'évaluation
- Test Indicator List of Products Move To Other ProductsDocument10 pagesTest Indicator List of Products Move To Other ProductsThiago R.Pas encore d'évaluation
- Amtech: NC-559-ASM No-Clean Solder PasteDocument2 pagesAmtech: NC-559-ASM No-Clean Solder PasteAkhmad MukhsinPas encore d'évaluation
- 27 Delta DVPDocument2 pages27 Delta DVPAbbas SaberiPas encore d'évaluation
- Features General Description: 3A, Ultra Low Dropout (0.23V Typical) Linear RegulatorDocument16 pagesFeatures General Description: 3A, Ultra Low Dropout (0.23V Typical) Linear RegulatorHerman ToothrotPas encore d'évaluation
- HCPL-7800 Application ManualDocument18 pagesHCPL-7800 Application ManualIjas AhamedPas encore d'évaluation
- Burr Brown INA101Document10 pagesBurr Brown INA101Newton SadaoPas encore d'évaluation
- Miscellaneous List of Products Move To Other ProductsDocument17 pagesMiscellaneous List of Products Move To Other ProductsMinhTuan NguyenPas encore d'évaluation
- KSS Cable TiesDocument1 pageKSS Cable TiesHeri MunirPas encore d'évaluation
- LMG-SSC12E64 User Manual - UpdatedDocument9 pagesLMG-SSC12E64 User Manual - UpdatedC.C. YangPas encore d'évaluation
- Lm3940imp-3 3Document11 pagesLm3940imp-3 3Kashi nathPas encore d'évaluation
- Keyence Fs v11pDocument4 pagesKeyence Fs v11pJoel Antonio Lopez LopezPas encore d'évaluation
- SN74LS147N - MotorolaDocument6 pagesSN74LS147N - MotorolajudithmansillaPas encore d'évaluation
- Data Sheet: Agilent 10-Element Bar Graph ArrayDocument7 pagesData Sheet: Agilent 10-Element Bar Graph Array彭以和Pas encore d'évaluation
- AC Machine Lecture No2Document28 pagesAC Machine Lecture No2Mohammed Dyhia AliPas encore d'évaluation
- Resistors PotentiometersDocument1 pageResistors PotentiometersPapahnya Qiana MaulinaPas encore d'évaluation
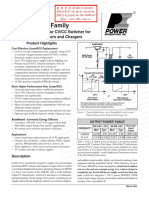
- Power Int LNK500PDocument18 pagesPower Int LNK500PmoseslanryPas encore d'évaluation
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesD'EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- PRM 1Document998 pagesPRM 1flo72afPas encore d'évaluation
- Catalogo General PDFDocument246 pagesCatalogo General PDFaldo peñaPas encore d'évaluation
- Motor Control Design SolutionsDocument6 pagesMotor Control Design Solutionsflo72afPas encore d'évaluation
- An Engineer's Guide To Industrial Robot Designs: E-BookDocument80 pagesAn Engineer's Guide To Industrial Robot Designs: E-BookGeorgi KostadinovPas encore d'évaluation
- ATmega328P - Instruction Set ManualDocument166 pagesATmega328P - Instruction Set ManualJesús Pérez MorenoPas encore d'évaluation
- SW AN 2017 - LWM2MRefAppDocument33 pagesSW AN 2017 - LWM2MRefAppflo72afPas encore d'évaluation
- DSPICDocument245 pagesDSPICJose Gavidia Ulloa100% (1)
- BDocument46 pagesBVijayenthiran SubramaniamPas encore d'évaluation
- Three Phase Power Power Factor Correction CircuitsDocument245 pagesThree Phase Power Power Factor Correction CircuitsmawaistpsPas encore d'évaluation
- Orionbms2 Operational Manual PDFDocument64 pagesOrionbms2 Operational Manual PDFflo72afPas encore d'évaluation
- A0 STNRGPF01 PDFDocument40 pagesA0 STNRGPF01 PDFflo72afPas encore d'évaluation
- Three Phase Power Power Factor Correction CircuitsDocument245 pagesThree Phase Power Power Factor Correction CircuitsmawaistpsPas encore d'évaluation
- A0 STNRGPF01 PDFDocument40 pagesA0 STNRGPF01 PDFflo72afPas encore d'évaluation
- IHI0035B Cs PFT v1 1 Architecture SpecDocument252 pagesIHI0035B Cs PFT v1 1 Architecture Specflo72afPas encore d'évaluation
- Arm7Tdmi: Technical Reference ManualDocument0 pageArm7Tdmi: Technical Reference Manualpraveen_kodgirwarPas encore d'évaluation
- F2837xD Microcontroller MDW 2-0Document324 pagesF2837xD Microcontroller MDW 2-0flo72afPas encore d'évaluation
- Rectifier Power Factor and Pulse-Width Modultion Controlled Rectifier CircuitsDocument23 pagesRectifier Power Factor and Pulse-Width Modultion Controlled Rectifier Circuitsflo72afPas encore d'évaluation
- F2837xD Microcontroller MDW 2-0Document324 pagesF2837xD Microcontroller MDW 2-0flo72afPas encore d'évaluation
- Kenwood DM-81 GDODocument26 pagesKenwood DM-81 GDOtonykoralPas encore d'évaluation
- DDI0479B Cortex M System Design Kit r0p0 TRMDocument171 pagesDDI0479B Cortex M System Design Kit r0p0 TRMflo72afPas encore d'évaluation
- Power Electronics Chapter 1Document12 pagesPower Electronics Chapter 1ahmed s. NourPas encore d'évaluation
- AT91SAM7SE256 512 Big PDFDocument682 pagesAT91SAM7SE256 512 Big PDFflo72afPas encore d'évaluation
- Ug 364 PDFDocument28 pagesUg 364 PDFflo72afPas encore d'évaluation
- Mikroc ManualDocument427 pagesMikroc Manualmontri_lpk1728100% (3)
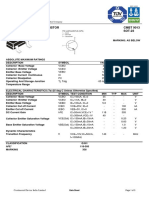
- 9013 Transistor NPNDocument3 pages9013 Transistor NPNflo72afPas encore d'évaluation
- K20 Sub-Family Reference Manual: Supports: MK20DX128VLL7, MK20DX256VLL7, MK20DX64VMC7, MK20DX128VMC7, MK20DX256VMC7Document1 449 pagesK20 Sub-Family Reference Manual: Supports: MK20DX128VLL7, MK20DX256VLL7, MK20DX64VMC7, MK20DX128VMC7, MK20DX256VMC7flo72afPas encore d'évaluation
- Rufg 4Document2 pagesRufg 4flo72afPas encore d'évaluation
- Katsnelson & Larionov 1981 Receiving Tubes PDFDocument457 pagesKatsnelson & Larionov 1981 Receiving Tubes PDFIstvan NagyPas encore d'évaluation
- K20 Sub-Family Reference Manual: Supports: MK20DX128VLL7, MK20DX256VLL7, MK20DX64VMC7, MK20DX128VMC7, MK20DX256VMC7Document1 449 pagesK20 Sub-Family Reference Manual: Supports: MK20DX128VLL7, MK20DX256VLL7, MK20DX64VMC7, MK20DX128VMC7, MK20DX256VMC7flo72afPas encore d'évaluation
- Evolution of Campus Switching: Marketing Presentation Marketing PresentationDocument35 pagesEvolution of Campus Switching: Marketing Presentation Marketing PresentationRosal Mark JovenPas encore d'évaluation
- Company Registration Procedure Handbook in Cambodia, EnglishDocument124 pagesCompany Registration Procedure Handbook in Cambodia, EnglishThea100% (16)
- Star Wars Galactic Connexionstm Galactic Beckett Star Wars Story Connexions CallingDocument4 pagesStar Wars Galactic Connexionstm Galactic Beckett Star Wars Story Connexions CallingJuan TorresPas encore d'évaluation
- BBAG MPR and STR LISTSDocument25 pagesBBAG MPR and STR LISTShimanshu ranjanPas encore d'évaluation
- دور أخلاقيات الأعمال في تحسين أداء المنظماتDocument14 pagesدور أخلاقيات الأعمال في تحسين أداء المنظماتChaima LaifaPas encore d'évaluation
- Iroquois Clothes and WampumDocument3 pagesIroquois Clothes and Wampumapi-254323856Pas encore d'évaluation
- DR Afwan Fajri - Trauma - Juli 2023Document82 pagesDR Afwan Fajri - Trauma - Juli 2023afwan fajriPas encore d'évaluation
- Bobcat E34 - E35Z Brochure - Adare MachineryDocument8 pagesBobcat E34 - E35Z Brochure - Adare MachineryNERDZONE TVPas encore d'évaluation
- Case Study Managerial EconomicsDocument4 pagesCase Study Managerial EconomicsZaza Afiza100% (1)
- Verilog A Model To CadenceDocument56 pagesVerilog A Model To CadenceJamesPas encore d'évaluation
- Hatayoga 1Document11 pagesHatayoga 1SACHIDANANDA SPas encore d'évaluation
- Introduction of ProtozoaDocument31 pagesIntroduction of ProtozoaEINSTEIN2D100% (2)
- MotorsDocument116 pagesMotorsAmália EirezPas encore d'évaluation
- USTH Algorithm RecursionDocument73 pagesUSTH Algorithm Recursionnhng2421Pas encore d'évaluation
- PEA Comp Study - Estate Planning For Private Equity Fund Managers (ITaback, JWaxenberg 10 - 10)Document13 pagesPEA Comp Study - Estate Planning For Private Equity Fund Managers (ITaback, JWaxenberg 10 - 10)lbaker2009Pas encore d'évaluation
- Crusader Castle Al-Karak Jordan Levant Pagan Fulk, King of Jerusalem MoabDocument3 pagesCrusader Castle Al-Karak Jordan Levant Pagan Fulk, King of Jerusalem MoabErika CalistroPas encore d'évaluation
- Different Principles Tools and Techniques in Creating A BusinessDocument5 pagesDifferent Principles Tools and Techniques in Creating A BusinessLuna LedezmaPas encore d'évaluation
- Case Study in Architectural Structures: A-7E Avionics System - ADocument36 pagesCase Study in Architectural Structures: A-7E Avionics System - Ajckz8Pas encore d'évaluation
- Lugam Annex Elementary School Second Quarter Second Periodical Test in EPP 6 H.EDocument4 pagesLugam Annex Elementary School Second Quarter Second Periodical Test in EPP 6 H.Ejess amielPas encore d'évaluation
- Molde Soldadura TADocument1 pageMolde Soldadura TAMarcos Ivan Ramirez AvenaPas encore d'évaluation
- Landcorp FLCC Brochure 2013 v3Document6 pagesLandcorp FLCC Brochure 2013 v3Shadi GarmaPas encore d'évaluation
- LET-English-Structure of English-ExamDocument57 pagesLET-English-Structure of English-ExamMarian Paz E Callo80% (5)
- E-Waste: Name: Nishant.V.Naik Class: F.Y.Btech (Civil) Div: VII SR - No: 18 Roll No: A050136Document11 pagesE-Waste: Name: Nishant.V.Naik Class: F.Y.Btech (Civil) Div: VII SR - No: 18 Roll No: A050136Nishant NaikPas encore d'évaluation
- Necromunda CatalogDocument35 pagesNecromunda Catalogzafnequin8494100% (1)
- Products ListDocument11 pagesProducts ListPorag AhmedPas encore d'évaluation
- The Chulalongkorn Centenary ParkDocument6 pagesThe Chulalongkorn Centenary ParkJack FooPas encore d'évaluation
- PC Engines APU2 Series System BoardDocument11 pagesPC Engines APU2 Series System Boardpdy2Pas encore d'évaluation
- ACTIX Basic (Sample CDMA)Document73 pagesACTIX Basic (Sample CDMA)radhiwibowoPas encore d'évaluation
- EvolutionCombatMedic 2022Document17 pagesEvolutionCombatMedic 2022smith.kevin1420344100% (1)
- Lecture 1 Electrolyte ImbalanceDocument15 pagesLecture 1 Electrolyte ImbalanceSajib Chandra RoyPas encore d'évaluation