Vous aimerez peut-être aussi
- DB Compact Weather Station WS600 UMB enDocument2 pagesDB Compact Weather Station WS600 UMB enmatefucskoPas encore d'évaluation
- WS600 Weather Sensor SpecsDocument3 pagesWS600 Weather Sensor SpecsAgustin ZamudioPas encore d'évaluation
- Davis Instruments 6152 Vantage Pro 2 Wireless Weather StationDocument5 pagesDavis Instruments 6152 Vantage Pro 2 Wireless Weather StationEngr Saif UllahPas encore d'évaluation
- Data Sheet - Weather Sensors - Lufft - WS501 UMBDocument3 pagesData Sheet - Weather Sensors - Lufft - WS501 UMBAudiGustiandiPas encore d'évaluation
- LufftDocument3 pagesLufftGabrielPas encore d'évaluation
- Decentlab DL ATM41 DatasheetDocument19 pagesDecentlab DL ATM41 Datasheetmau546Pas encore d'évaluation
- Lufft WS700-UMB Smart Weather SensorDocument3 pagesLufft WS700-UMB Smart Weather SensorJose Luis IglesiasPas encore d'évaluation
- Automatic Weather StationDocument4 pagesAutomatic Weather StationPintu KumarPas encore d'évaluation
- DS - EN - Ott - Lufft - WS - Series - Compact - Weather - Sensors - 20220110 (211739)Document3 pagesDS - EN - Ott - Lufft - WS - Series - Compact - Weather - Sensors - 20220110 (211739)matefucskoPas encore d'évaluation
- IMI VIB PrecisionAccels - LowResDocument20 pagesIMI VIB PrecisionAccels - LowResAnonymous WDTFw8EKPas encore d'évaluation
- B-Atmos-14-EDocument2 pagesB-Atmos-14-Ejoel abrahamPas encore d'évaluation
- MODEL 81000: Ultrasonic AnemometerDocument11 pagesMODEL 81000: Ultrasonic AnemometerLac TranPas encore d'évaluation
- Fondriest Statie MeteoDocument1 pageFondriest Statie MeteoCiprian NeaguPas encore d'évaluation
- Lufft WS601-UMB – Temperature, Relative Humidity, Precipitation, Air Pressure, Wind, Electronic CompassDocument1 pageLufft WS601-UMB – Temperature, Relative Humidity, Precipitation, Air Pressure, Wind, Electronic CompassCiprian NeaguPas encore d'évaluation
- GF DS SFM3019 D1Document18 pagesGF DS SFM3019 D1Vahan KirakosyanPas encore d'évaluation
- Theta Air Quality Single PageDocument1 pageTheta Air Quality Single Pagemaria shintaPas encore d'évaluation
- DOC022.53.80022 - TDS Probe ManualDocument10 pagesDOC022.53.80022 - TDS Probe ManualMuhamed HerićPas encore d'évaluation
- Growatt Weather StationDocument4 pagesGrowatt Weather StationRuben EscobedoPas encore d'évaluation
- Sensirion CO2 Sensors SCD30 DatasheetDocument8 pagesSensirion CO2 Sensors SCD30 Datasheetcomando_azulPas encore d'évaluation
- B Metsens500Document2 pagesB Metsens500weigth3337Pas encore d'évaluation
- Pyrosigma Operators GuideDocument12 pagesPyrosigma Operators GuidejackPas encore d'évaluation
- RK900-01Automatic Weather StationDocument11 pagesRK900-01Automatic Weather StationAlfin RusdiansyahPas encore d'évaluation
- Calys 75Document6 pagesCalys 75Paul ChiriacescuPas encore d'évaluation
- HACH - Conductividad CalibraciónDocument12 pagesHACH - Conductividad CalibraciónKratos EspejoPas encore d'évaluation
- User Instructions: Conductivity Probe: Model CDC40101, CDC40103, CDC40105, CDC40110, CDC40115, CDC40130Document8 pagesUser Instructions: Conductivity Probe: Model CDC40101, CDC40103, CDC40105, CDC40110, CDC40115, CDC401309318863387Pas encore d'évaluation
- Calys 100Document6 pagesCalys 100Paul ChiriacescuPas encore d'évaluation
- True RMS: 600A AC Auto-Ranging Digital Clamp MeterDocument48 pagesTrue RMS: 600A AC Auto-Ranging Digital Clamp Metergary hillPas encore d'évaluation
- Datasheet DHT11Document8 pagesDatasheet DHT11Surya HidayatPas encore d'évaluation
- RG Omega SPT 300 A4 DatasheetDocument2 pagesRG Omega SPT 300 A4 Datasheetgonzalito777Pas encore d'évaluation
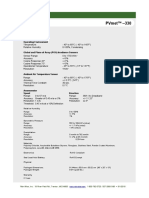
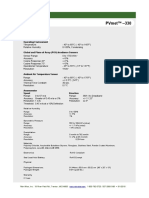
- PVmet-330 - Spec SheetDocument1 pagePVmet-330 - Spec SheetIntegrated PowerPas encore d'évaluation
- PVmet 330 Spec SheetDocument1 pagePVmet 330 Spec SheetHelloPas encore d'évaluation
- MODEL 81000V: Ultrasonic AnemometerDocument10 pagesMODEL 81000V: Ultrasonic AnemometerLac TranPas encore d'évaluation
- CM DatasheetDocument2 pagesCM DatasheetRahul BharadwajPas encore d'évaluation
- Sensor Konvensional Dan DAUDocument10 pagesSensor Konvensional Dan DAULukman WahyudiPas encore d'évaluation
- HVT DS HAEFELY 2293 Automatic Transformer Winding Analyzer V2002Document4 pagesHVT DS HAEFELY 2293 Automatic Transformer Winding Analyzer V2002זיו קלייןPas encore d'évaluation
- FST100 QXZ 01环境监测气象站 (轻型) 样本 英文版Document4 pagesFST100 QXZ 01环境监测气象站 (轻型) 样本 英文版Cristan LopezPas encore d'évaluation
- LM-8102 en Manual PDFDocument16 pagesLM-8102 en Manual PDFBiran AbadiPas encore d'évaluation
- Datasheet s1 Pressure TransducerDocument6 pagesDatasheet s1 Pressure TransducerAlexander BerbinPas encore d'évaluation
- Model KM 734: Hot Wire Thermal AnemometerDocument1 pageModel KM 734: Hot Wire Thermal AnemometerkumarPas encore d'évaluation
- MEMS Digital In-Place Inclinometer SystemDocument2 pagesMEMS Digital In-Place Inclinometer SystemSpeedraw FremyPas encore d'évaluation
- Folleto Theta MP500Document3 pagesFolleto Theta MP500damiankra1930Pas encore d'évaluation
- Form Spesifikasi: Pressure MeasurementDocument3 pagesForm Spesifikasi: Pressure MeasurementGalih NugrohoPas encore d'évaluation
- Better Measurement: Simply A Question ofDocument4 pagesBetter Measurement: Simply A Question ofpedro kaiserPas encore d'évaluation
- Feanor LP30 Laser InterferometerDocument13 pagesFeanor LP30 Laser InterferometerfeanorouPas encore d'évaluation
- Written ReportDocument6 pagesWritten ReportJohn Kenneth Santiago PaulinoPas encore d'évaluation
- DHT11 Technical Data Sheet Translated Version 1143054Document10 pagesDHT11 Technical Data Sheet Translated Version 1143054cesarmachucaPas encore d'évaluation
- Solar Powered Wireless Wifi Weather Station: Screen DisplayDocument2 pagesSolar Powered Wireless Wifi Weather Station: Screen DisplayPintu KumarPas encore d'évaluation
- Datasheet - Particle Sensor, HPM Series - 32322550-A-En - Final - 29nov16Document5 pagesDatasheet - Particle Sensor, HPM Series - 32322550-A-En - Final - 29nov16Sotara RenPas encore d'évaluation
- 4420 enDocument4 pages4420 enLevent MertPas encore d'évaluation
- Walchem Intuition-9 BrochureDocument8 pagesWalchem Intuition-9 BrochureJim FrenkenPas encore d'évaluation
- Walchem P100 ManualDocument75 pagesWalchem P100 ManualmarcosPas encore d'évaluation
- 0900766b8163226f PDFDocument2 pages0900766b8163226f PDFAleksandr DugarevPas encore d'évaluation
- Digital Multimeter: Instruction ManualDocument56 pagesDigital Multimeter: Instruction ManualCarlos LMPas encore d'évaluation
- EF0391 DataSheetDocument2 pagesEF0391 DataSheetMarcelo Hernan LaurettiPas encore d'évaluation
- M4100 TechSpecs 12-08 US LRDocument2 pagesM4100 TechSpecs 12-08 US LRKinhPas encore d'évaluation
- Sensedge Mini Technical Specifications - 2021Document9 pagesSensedge Mini Technical Specifications - 2021FELIX DOSSPas encore d'évaluation
- SHT3x Datasheet AnalogDocument13 pagesSHT3x Datasheet AnalogAaronPas encore d'évaluation
- Position Sensing: Angle and Distance Measurement for EngineersD'EverandPosition Sensing: Angle and Distance Measurement for EngineersPas encore d'évaluation
- Automatic Controls for Heating and Air Conditioning: Principles and ApplicationsD'EverandAutomatic Controls for Heating and Air Conditioning: Principles and ApplicationsÉvaluation : 4 sur 5 étoiles4/5 (2)
- README LicenseDocument1 pageREADME LicenseNayadet CanalesPas encore d'évaluation
- SDI-12 - Version1 - 3 January 28, 2016Document50 pagesSDI-12 - Version1 - 3 January 28, 2016Nayadet CanalesPas encore d'évaluation
- Coppock J Bowtell Hills PDFDocument156 pagesCoppock J Bowtell Hills PDFNayadet CanalesPas encore d'évaluation
- ATMOS 41 weather station guideDocument14 pagesATMOS 41 weather station guideNayadet CanalesPas encore d'évaluation
- SDI-12 - Version1 - 3 January 28, 2016Document50 pagesSDI-12 - Version1 - 3 January 28, 2016Nayadet CanalesPas encore d'évaluation
- THESIS Team No Choice UpdatedDocument47 pagesTHESIS Team No Choice UpdatedBrian JasperPas encore d'évaluation
- AA Broiler Handbook2014i EN PDFDocument148 pagesAA Broiler Handbook2014i EN PDFGirish KumarPas encore d'évaluation
- Close Control Installation and Maintenance Manual PDFDocument116 pagesClose Control Installation and Maintenance Manual PDFArshad Mahmood100% (1)
- Atmospheric MoistureDocument110 pagesAtmospheric MoistureAnand raj Raja Babu100% (1)
- HVAC Controls - Operation and Maintenance (3rd EditionDocument356 pagesHVAC Controls - Operation and Maintenance (3rd EditionkgvtgPas encore d'évaluation
- Me2202 PDFDocument15 pagesMe2202 PDFvis3012Pas encore d'évaluation
- TRNSYS Builsing Cooling Load CalculationDocument12 pagesTRNSYS Builsing Cooling Load CalculationSaba Arif0% (1)
- Otodectes Cynotis (Acari PsoroptidaeDocument9 pagesOtodectes Cynotis (Acari PsoroptidaeMaJose Madrid CPas encore d'évaluation
- Resist 78: Technical Data Sheet Application GuideDocument7 pagesResist 78: Technical Data Sheet Application GuideEko Adi PutraPas encore d'évaluation
- Reitz GeneralDocument28 pagesReitz GeneralRohit GadekarPas encore d'évaluation
- Capillary Driven Electrokinetic Generator For Environmental Energy HarvestingDocument7 pagesCapillary Driven Electrokinetic Generator For Environmental Energy Harvestingfeprinciples1607Pas encore d'évaluation
- Define Brooding and Discuss Different Requirements of Brooding SystemDocument17 pagesDefine Brooding and Discuss Different Requirements of Brooding SystemNisar AhmedPas encore d'évaluation
- ASTM-D-2247 Standard Practice Testing Coatings100Document5 pagesASTM-D-2247 Standard Practice Testing Coatings100chinocatPas encore d'évaluation
- Aultons Pharmaceuticals Drying PDFDocument18 pagesAultons Pharmaceuticals Drying PDFAdrián L ValladaresPas encore d'évaluation
- Sikagard-62: 2-Part Epoxy Protective CoatingDocument5 pagesSikagard-62: 2-Part Epoxy Protective CoatingJet ToledoPas encore d'évaluation
- 1988 Samsung Transistor Data Book Vol 1 PDFDocument698 pages1988 Samsung Transistor Data Book Vol 1 PDFuebanPas encore d'évaluation
- Diagrama Tarjeta TcomDocument31 pagesDiagrama Tarjeta TcomJERARKIA LIRIKAL MCYASIRPas encore d'évaluation
- Italian Equipment For Palm Date ProcessingDocument57 pagesItalian Equipment For Palm Date ProcessingSatya Pradeep PulakurthiPas encore d'évaluation
- Catalogue Sheet CSBDocument14 pagesCatalogue Sheet CSBthermosol5416Pas encore d'évaluation
- Mass Transfer Coefficients and DiffusivityDocument43 pagesMass Transfer Coefficients and DiffusivityJose Paolo MamuyacPas encore d'évaluation
- Solar Drying of Tropical Agricultural CropsDocument18 pagesSolar Drying of Tropical Agricultural CropsashisbhuniyaPas encore d'évaluation
- Air Inlet Turbines AshraeDocument96 pagesAir Inlet Turbines Ashraednps2011Pas encore d'évaluation
- Kenz Cardico 1210 Twelve Channel Precision Digital Electrocardiograph With Analysis and Various Features To Meet Your Requirements SpecificationsDocument1 pageKenz Cardico 1210 Twelve Channel Precision Digital Electrocardiograph With Analysis and Various Features To Meet Your Requirements SpecificationsAthariq Syahnanditya100% (1)
- The Dehumidification Handbook Third EditionDocument231 pagesThe Dehumidification Handbook Third Editionong100% (3)
- Rates of Evaporation From Swimming Pools in Active UseDocument10 pagesRates of Evaporation From Swimming Pools in Active Useاحمد الجزار20070% (1)
- IEEE Guide For Moisture Measurement and Control in SF Gas-Insulated EquipmentDocument42 pagesIEEE Guide For Moisture Measurement and Control in SF Gas-Insulated EquipmentMayur GuptaPas encore d'évaluation
- GBSS9.0 DBS3900 Product Description V2.1 (20110228)Document28 pagesGBSS9.0 DBS3900 Product Description V2.1 (20110228)Peyman AllahverdianPas encore d'évaluation
- Optimize food drying processesDocument27 pagesOptimize food drying processesDavid Enrique Alanis RojasPas encore d'évaluation
- CFD SimulationDocument39 pagesCFD SimulationSambhav JainPas encore d'évaluation
- Condensation in BuildingsDocument105 pagesCondensation in Buildingsjekabsj100% (2)