Vous aimerez peut-être aussi
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- MEXT Scholarship Interview ExperienceDocument4 pagesMEXT Scholarship Interview ExperienceTsige TadessePas encore d'évaluation
- Boundary Value Problems Part 1Document20 pagesBoundary Value Problems Part 1david219125Pas encore d'évaluation
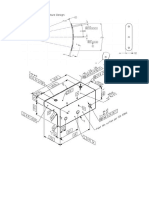
- Functional Gage and Fixture DesignDocument8 pagesFunctional Gage and Fixture DesignAnonymous 7ZTcBn0% (1)
- Deshmukh PC Quantum Mechanics Formalism Methodologies and APDocument659 pagesDeshmukh PC Quantum Mechanics Formalism Methodologies and APStrahinja DonicPas encore d'évaluation
- Computer Methods For Ordinary Differential Equations and Differential Algebraic EquationsDocument330 pagesComputer Methods For Ordinary Differential Equations and Differential Algebraic EquationsHerib Blanco100% (1)
- Ch02 - Mechanical Properties of MaterialsDocument53 pagesCh02 - Mechanical Properties of MaterialsTsige TadessePas encore d'évaluation
- Guass Theoram Investigatory ProjectDocument10 pagesGuass Theoram Investigatory ProjectShailendra Kr Yadav60% (5)
- L01 - Dynamics of Lumped Parameter Systems PDFDocument22 pagesL01 - Dynamics of Lumped Parameter Systems PDFTsige TadessePas encore d'évaluation
- Lec2 PDFDocument32 pagesLec2 PDFmahamd saiedPas encore d'évaluation
- Module4 PDFDocument65 pagesModule4 PDFTsige TadessePas encore d'évaluation
- Manual Coursera sp15 Week 1 PDFDocument7 pagesManual Coursera sp15 Week 1 PDFLarry BerriosPas encore d'évaluation
- Robust Control - WikipediaDocument3 pagesRobust Control - WikipediaTsige TadessePas encore d'évaluation
- Differential Drive RobotDocument5 pagesDifferential Drive RobotYaveesh Yav OPas encore d'évaluation
- Lec2 PDFDocument32 pagesLec2 PDFmahamd saiedPas encore d'évaluation
- Differential Drive RobotDocument5 pagesDifferential Drive RobotYaveesh Yav OPas encore d'évaluation
- KenGen Tender for Supply of Electrical Tools and EquipmentDocument43 pagesKenGen Tender for Supply of Electrical Tools and EquipmentTsige TadessePas encore d'évaluation
- Lab Equipment For Electrical Installation and Workshop Laboratory N o Catego Ry Type Specification Purpose Q TT y 1 Weldin G 1. 1 0 P C SDocument13 pagesLab Equipment For Electrical Installation and Workshop Laboratory N o Catego Ry Type Specification Purpose Q TT y 1 Weldin G 1. 1 0 P C STsige TadessePas encore d'évaluation
- Lab Equipment For Electrical Installation and Workshop Laboratory N o Catego Ry Type Specification Purpose Q TT y 1 Weldin G 1. 1 0 P C SDocument13 pagesLab Equipment For Electrical Installation and Workshop Laboratory N o Catego Ry Type Specification Purpose Q TT y 1 Weldin G 1. 1 0 P C STsige TadessePas encore d'évaluation
- Guidelines Master Mind Scholarships 2017-2018Document2 pagesGuidelines Master Mind Scholarships 2017-2018Tsige TadessePas encore d'évaluation
- Write ALP For The Following Requirements: Individual Assignment (15%)Document1 pageWrite ALP For The Following Requirements: Individual Assignment (15%)Tsige TadessePas encore d'évaluation
- AssignmentDocument1 pageAssignmentTsige TadessePas encore d'évaluation
- Electrical Connections For EquipmentDocument6 pagesElectrical Connections For EquipmentTsige TadessePas encore d'évaluation
- Assignment-1 Weight (20%)Document1 pageAssignment-1 Weight (20%)Tsige TadessePas encore d'évaluation
- Write ALP For The Following Requirements: Individual Assignment (15%)Document1 pageWrite ALP For The Following Requirements: Individual Assignment (15%)Tsige TadessePas encore d'évaluation
- (Spring 2017) UOU Admisison Guideline For Postgraduate ProgrammeDocument7 pages(Spring 2017) UOU Admisison Guideline For Postgraduate ProgrammeTsige TadessePas encore d'évaluation
- Assignment On Stem and Leaf: JANUARY 13, 2017Document5 pagesAssignment On Stem and Leaf: JANUARY 13, 2017Tsige TadessePas encore d'évaluation
- Master I Robotik Och Automation, 120 HE Credits Tarau Master in Robotics and Automation, 120 HE CreditsDocument4 pagesMaster I Robotik Och Automation, 120 HE Credits Tarau Master in Robotics and Automation, 120 HE CreditsTsige TadessePas encore d'évaluation
- Bounding Exploration Bias for Heavy-Tailed DistributionsDocument7 pagesBounding Exploration Bias for Heavy-Tailed DistributionsTsige TadessePas encore d'évaluation
- Jacobian Matrix and Determinant PDFDocument6 pagesJacobian Matrix and Determinant PDFTapas MajiPas encore d'évaluation
- 9231 s14 Ms 11Document10 pages9231 s14 Ms 11Cheah Jun SiangPas encore d'évaluation
- Einstein Theory of RelativityDocument26 pagesEinstein Theory of RelativityPrince JurynPas encore d'évaluation
- Practice Questions Lecture 35 To 45 With SolutionDocument7 pagesPractice Questions Lecture 35 To 45 With SolutionlordjjPas encore d'évaluation
- A2 Physics Unit 4 Topic 3 Examzone AnswersDocument2 pagesA2 Physics Unit 4 Topic 3 Examzone AnswersSaad Ul HaqPas encore d'évaluation
- Research 1Document9 pagesResearch 1Dr ADITYA VORAPas encore d'évaluation
- Physics homework solutions for chapter 23 problemsDocument12 pagesPhysics homework solutions for chapter 23 problemsSandeep BadigantiPas encore d'évaluation
- 250+ Top Mcqs On Groups - Existence of Identity & Inverse and AnswersDocument4 pages250+ Top Mcqs On Groups - Existence of Identity & Inverse and AnswersZawar KhanPas encore d'évaluation
- 5.111 Principles of Chemical Science: Mit OpencoursewareDocument7 pages5.111 Principles of Chemical Science: Mit OpencoursewareYohanes FisehaPas encore d'évaluation
- MTH100 Assignment No. 2Document4 pagesMTH100 Assignment No. 2Urwa ButtPas encore d'évaluation
- 5.2 Orthogonal Complements and ProjectionsDocument17 pages5.2 Orthogonal Complements and ProjectionsCostalotPas encore d'évaluation
- Compton EffectDocument3 pagesCompton Effectimran hossainPas encore d'évaluation
- Lyapunov Controller Inverted PendulumDocument6 pagesLyapunov Controller Inverted Pendulumle duc huynhPas encore d'évaluation
- Coulomb's Law: Electrostatics Revision Quiz - 2Document14 pagesCoulomb's Law: Electrostatics Revision Quiz - 2Abhishek SahuPas encore d'évaluation
- CH 7.9: Nonhomogeneous Linear Systems: The General Theory of A Nonhomogeneous System of EquationsDocument21 pagesCH 7.9: Nonhomogeneous Linear Systems: The General Theory of A Nonhomogeneous System of EquationsRMolina65Pas encore d'évaluation
- CH04 - Etude Des Déformations - App - 01Document3 pagesCH04 - Etude Des Déformations - App - 01SERGIOPas encore d'évaluation
- Year 11 General Mathematics 2014 - Matrices Test: NameDocument6 pagesYear 11 General Mathematics 2014 - Matrices Test: NameWai HponePas encore d'évaluation
- Chapter 11: Numerical Solution of The Eigenvalue ProblemDocument24 pagesChapter 11: Numerical Solution of The Eigenvalue ProblemFernanda LagoPas encore d'évaluation
- Machine Learning Project Writing Help For Students: KeywordsDocument6 pagesMachine Learning Project Writing Help For Students: KeywordsAlexandre CabrelPas encore d'évaluation
- Delayed-Choice Experiments and The Metaphysics of EntanglementDocument13 pagesDelayed-Choice Experiments and The Metaphysics of EntanglementTS008Pas encore d'évaluation
- Calc 3 Final Exam - EastmanDocument3 pagesCalc 3 Final Exam - EastmanOutworld DevourerPas encore d'évaluation
- Quarter 4 - Module 17 Physical ScienceDocument4 pagesQuarter 4 - Module 17 Physical ScienceKristine AlcordoPas encore d'évaluation
- 3.1 The Chain Rule: NotesDocument5 pages3.1 The Chain Rule: NotesAzra OzenPas encore d'évaluation
- Lesson 1 Electromagnetic CircuitsDocument27 pagesLesson 1 Electromagnetic CircuitsjohnpaulshobayanPas encore d'évaluation
- Atomic Structure 11Document303 pagesAtomic Structure 11aleena'Pas encore d'évaluation
- Atomic TimelineDocument25 pagesAtomic TimelineImee TiloPas encore d'évaluation