Vous aimerez peut-être aussi
- Defined and Described: Figure 2. Transformer-Coupled SSR Figure 1. Hybrid SSRDocument5 pagesDefined and Described: Figure 2. Transformer-Coupled SSR Figure 1. Hybrid SSRpidmap2Pas encore d'évaluation
- EE 741 System ProtectionDocument25 pagesEE 741 System ProtectionReymart ManablugPas encore d'évaluation
- The Application of Relay Coil Suppression With DC RelaysDocument3 pagesThe Application of Relay Coil Suppression With DC RelaysJesus Deneb Juarez GuerreroPas encore d'évaluation
- Circuit Breaker Ratings - A Primer For Protection EngineersDocument13 pagesCircuit Breaker Ratings - A Primer For Protection EngineersAlberto José Bermúdez AriasPas encore d'évaluation
- Latest Transformers Questions AnswersDocument7 pagesLatest Transformers Questions AnswersInstrumentation ToolsPas encore d'évaluation
- Varistor IntroductionDocument7 pagesVaristor IntroductionRadhakrishnan100% (1)
- DV by DTDocument15 pagesDV by DTkrcdewanewPas encore d'évaluation
- Circuit Breaker (Disambiguation) : For Other Uses, SeeDocument8 pagesCircuit Breaker (Disambiguation) : For Other Uses, Seeccpl_kiranPas encore d'évaluation
- Relay TutorialDocument3 pagesRelay Tutorialant29539432Pas encore d'évaluation
- E - Solid State Relays Basic InformationDocument4 pagesE - Solid State Relays Basic Informations7502000800Pas encore d'évaluation
- RRE Reed Switch NotesDocument19 pagesRRE Reed Switch NotesMario MasettiPas encore d'évaluation
- Basic Design and Operation: Electrically SwitchDocument11 pagesBasic Design and Operation: Electrically SwitchAnina JacobPas encore d'évaluation
- Shunt (Electrical) - WikipediaDocument10 pagesShunt (Electrical) - WikipediabPas encore d'évaluation
- Transient Suppression Devices and Voltage ClampingDocument10 pagesTransient Suppression Devices and Voltage Clampingmarcoms75Pas encore d'évaluation
- Types of Resistance: Fixed ResistorsDocument4 pagesTypes of Resistance: Fixed ResistorsFatima SeharPas encore d'évaluation
- Available Short Circuit CurrentDocument17 pagesAvailable Short Circuit CurrentAnonymous IN80L4rRPas encore d'évaluation
- 04 Inrush Currents Can Be Avoided E 01Document2 pages04 Inrush Currents Can Be Avoided E 01Ayman HenryPas encore d'évaluation
- A Circuit Breaker Is An AutomaticallyDocument9 pagesA Circuit Breaker Is An AutomaticallyroshithachameeraPas encore d'évaluation
- 5988 6917enDocument7 pages5988 6917enИван КумбровPas encore d'évaluation
- Necessity of A Protection SystemDocument29 pagesNecessity of A Protection Systemarmanmanyata010299Pas encore d'évaluation
- IRXm Product GuideDocument8 pagesIRXm Product Guidedeepak2628Pas encore d'évaluation
- Relay: Fig 6.1: Automotive-Style Miniature Relay, Dust Cover Is Taken OffDocument12 pagesRelay: Fig 6.1: Automotive-Style Miniature Relay, Dust Cover Is Taken OffmichealPas encore d'évaluation
- Project For ElectronicDocument26 pagesProject For ElectronicGanesh GaradPas encore d'évaluation
- ThyristorsDocument4 pagesThyristorssanal89Pas encore d'évaluation
- What Is The Difference Between Momentary DutyDocument1 pageWhat Is The Difference Between Momentary DutyArnel Pascual LaquindanumPas encore d'évaluation
- Pulse TransformerDocument7 pagesPulse TransformerKishor Janjal PatilPas encore d'évaluation
- Electrically Switch Electromagnet Solid-State RelaysDocument4 pagesElectrically Switch Electromagnet Solid-State RelaysOMSURYACHANDRANPas encore d'évaluation
- Infrared RaysDocument7 pagesInfrared RaysShree RaiPas encore d'évaluation
- Selection of ArresterRatingsDocument3 pagesSelection of ArresterRatingshaitpmPas encore d'évaluation
- Different Types of RelaysDocument34 pagesDifferent Types of RelayssupriyarakshitPas encore d'évaluation
- Transient Over VoltagesDocument38 pagesTransient Over Voltagesraghav4life8724Pas encore d'évaluation
- An Introduction To Transient Voltage Suppresor Devices: Micronote #102Document2 pagesAn Introduction To Transient Voltage Suppresor Devices: Micronote #102ndcongPas encore d'évaluation
- MCQS On Power Electronics 5Document14 pagesMCQS On Power Electronics 5Ameen UllahPas encore d'évaluation
- Sinha Power Plant QuestionDocument14 pagesSinha Power Plant QuestionRaihanPas encore d'évaluation
- ResistorsDocument2 pagesResistorsBruce LyndePas encore d'évaluation
- Solid State Relays Overvoltage ProtectionDocument4 pagesSolid State Relays Overvoltage ProtectionRavenShieldXPas encore d'évaluation
- Relay: Navigation SearchDocument14 pagesRelay: Navigation SearchAbhishek ChakrabortyPas encore d'évaluation
- X10378 Inductive Loads Remedies Issue 1Document2 pagesX10378 Inductive Loads Remedies Issue 1Sina MehrabafiPas encore d'évaluation
- Slides For Multi Level Inverter in PsimDocument16 pagesSlides For Multi Level Inverter in Psimmuhammad saeedPas encore d'évaluation
- Anti Condensation HeatersDocument5 pagesAnti Condensation HeatersZaferullah KhanPas encore d'évaluation
- Medium Power Diodes: Submitted By: Vikram 09235 Nikhil 09236 Vivek 09238 Prashant 09239Document14 pagesMedium Power Diodes: Submitted By: Vikram 09235 Nikhil 09236 Vivek 09238 Prashant 09239Vivek Kumar RuhilPas encore d'évaluation
- An RLC CircuitDocument15 pagesAn RLC CircuitJeet SahooPas encore d'évaluation
- Eee421: Power Electronics: Power Semiconductor Devices: DiodeDocument12 pagesEee421: Power Electronics: Power Semiconductor Devices: DiodeRafat ShamsPas encore d'évaluation
- Electrically Switch ElectromagnetDocument16 pagesElectrically Switch ElectromagnetThamarai Kannan RamajayamPas encore d'évaluation
- Relay: This Article Is About The Electronic Component. For Other Uses, SeeDocument11 pagesRelay: This Article Is About The Electronic Component. For Other Uses, SeeAkash MohantyPas encore d'évaluation
- Power System Protection-2Document49 pagesPower System Protection-2IsaacPas encore d'évaluation
- Eee421: Power Electronics: Power Semiconductor Devices:DiodeDocument12 pagesEee421: Power Electronics: Power Semiconductor Devices:DiodeRafat ShamsPas encore d'évaluation
- Chapter 3Document10 pagesChapter 3nassim.1979Pas encore d'évaluation
- Relay Working PrincipleDocument8 pagesRelay Working PrinciplePoornachandar7Pas encore d'évaluation
- TES-P-119.06 R0 - Surge ProtectionDocument15 pagesTES-P-119.06 R0 - Surge ProtectionMohamed Eldin100% (2)
- Metal-Oxide Surge Arresters in High-Voltage Transmission and Distribution SystemsDocument6 pagesMetal-Oxide Surge Arresters in High-Voltage Transmission and Distribution SystemsBhargavi PadalaPas encore d'évaluation
- 1MRK 508 015 BenDocument20 pages1MRK 508 015 Benalaa6474794Pas encore d'évaluation
- Surge ArresterDocument40 pagesSurge Arrestermeraat100% (1)
- Est Module: 1Document8 pagesEst Module: 1YisobiPas encore d'évaluation
- Lightning ArresterDocument13 pagesLightning ArresterSubhransu MohapatraPas encore d'évaluation
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10D'EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Pas encore d'évaluation
- A Guide to Electronic Maintenance and RepairsD'EverandA Guide to Electronic Maintenance and RepairsÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- Ac-Aud 3Document10 pagesAc-Aud 3Mark Anthony TibulePas encore d'évaluation
- Training Manual: TOTAL STATION Handling Guideline: Traverse and Detailing Summery GuidelineDocument10 pagesTraining Manual: TOTAL STATION Handling Guideline: Traverse and Detailing Summery Guidelinenilmo surveyorsPas encore d'évaluation
- FPSO Swivel Load MonitoringDocument1 pageFPSO Swivel Load MonitoringKim OanhPas encore d'évaluation
- AWS Academy Cloud Foundations Module 05 Student GuideDocument75 pagesAWS Academy Cloud Foundations Module 05 Student GuidevalzPas encore d'évaluation
- Bartender BrochureDocument13 pagesBartender Brochuren_santhoshuPas encore d'évaluation
- AC Servo Motor PDFDocument40 pagesAC Servo Motor PDFRavindra Angal100% (1)
- Energy Management and Heat Storage For Solar Adsorption CoolingDocument11 pagesEnergy Management and Heat Storage For Solar Adsorption CoolingRendy Adhi RachmantoPas encore d'évaluation
- IPLOOK SMS Product Information V1.3Document14 pagesIPLOOK SMS Product Information V1.3IPLOOK TechnologiesPas encore d'évaluation
- ERP ArchitectureDocument43 pagesERP ArchitectureÄkshít ŠhàŕmäPas encore d'évaluation
- Process Selection and Facility LayoutDocument59 pagesProcess Selection and Facility LayoutKhietPas encore d'évaluation
- 1327 Brochure LPKF Protomats S Series enDocument8 pages1327 Brochure LPKF Protomats S Series enAlexPas encore d'évaluation
- Safety Manual (B-80687EN 10)Document35 pagesSafety Manual (B-80687EN 10)Jander Luiz TomaziPas encore d'évaluation
- Introduction of CENTUM VP R6 RS R4 FullDocument98 pagesIntroduction of CENTUM VP R6 RS R4 FullmohamedfaizykaPas encore d'évaluation
- Sikagrout®-114 Ae: Product Data SheetDocument3 pagesSikagrout®-114 Ae: Product Data SheetAlexander Jonas Zach ValdrizPas encore d'évaluation
- E-Waste An Overview On Generation, Collection, Legislation and Recycling Practices Denise PDFDocument11 pagesE-Waste An Overview On Generation, Collection, Legislation and Recycling Practices Denise PDFThamirisAgmPas encore d'évaluation
- 18,21. Naidian CatalogueDocument31 pages18,21. Naidian CatalogueTaQuangDucPas encore d'évaluation
- Zerto Virtual Manager Administration GuideDocument336 pagesZerto Virtual Manager Administration GuideVakul BhattPas encore d'évaluation
- Applied Information Processing Systems 2022Document588 pagesApplied Information Processing Systems 2022Med KH100% (1)
- Kerio Connect Adminguide en 7.4.0 7098Document402 pagesKerio Connect Adminguide en 7.4.0 7098Van NhoPas encore d'évaluation
- Mini210s Manual 20120531Document233 pagesMini210s Manual 20120531cor01Pas encore d'évaluation
- Gei 100727 PDFDocument26 pagesGei 100727 PDFMohd Khairul AshrafPas encore d'évaluation
- As 2159 2009 Piling Design and InstallationDocument9 pagesAs 2159 2009 Piling Design and InstallationKinson LowPas encore d'évaluation
- Energy Efficient BuildingDocument11 pagesEnergy Efficient BuildingSantosh Basnet100% (2)
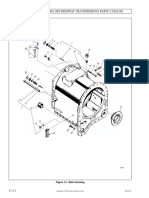
- Allison 5000/6000 Series Off-Highway Transmissions Parts CatalogDocument3 pagesAllison 5000/6000 Series Off-Highway Transmissions Parts CatalogMaya OlmecaPas encore d'évaluation
- NEW Colchester Typhoon Twin Spindle CNC Turning Centre Brochure 2018Document12 pagesNEW Colchester Typhoon Twin Spindle CNC Turning Centre Brochure 2018Marlon GilerPas encore d'évaluation
- Pe 001Document216 pagesPe 001erivan bernardoPas encore d'évaluation
- Rate Monotonic Scheduling: Group - 12Document19 pagesRate Monotonic Scheduling: Group - 12Brajmohan kr SinghPas encore d'évaluation
- Connecting To The Internet With Pico WDocument30 pagesConnecting To The Internet With Pico WKnut BoergePas encore d'évaluation
- Cognitive API Using Neural NetworkDocument30 pagesCognitive API Using Neural NetworkAnish SPas encore d'évaluation
- Aztec and Inca Civilization: Evidence of Science and Technology During Pre-Columbian TimeDocument25 pagesAztec and Inca Civilization: Evidence of Science and Technology During Pre-Columbian TimeJedadryon Dilla FernandezPas encore d'évaluation