Vous aimerez peut-être aussi
- John Willard Milnor - Topology From The Differentiable ViewpointDocument76 pagesJohn Willard Milnor - Topology From The Differentiable Viewpointandhrimnir100% (1)
- Single Degree of FreedomDocument29 pagesSingle Degree of Freedommm0493440Pas encore d'évaluation
- Chapter 2 - Free Vibration of Multi-Degree-of-Freedom Systems - IIDocument8 pagesChapter 2 - Free Vibration of Multi-Degree-of-Freedom Systems - IIAnonymous LcR6ykPBTPas encore d'évaluation
- Simulation of Inverted Pendulum Using Neural Networks For IdentificationDocument7 pagesSimulation of Inverted Pendulum Using Neural Networks For IdentificationYeshitila HailuPas encore d'évaluation
- Application of First Integrals in The Construction of The Lyapunov Function For The Random Response Stability TestingDocument4 pagesApplication of First Integrals in The Construction of The Lyapunov Function For The Random Response Stability TestingPetr FerfeckiPas encore d'évaluation
- Topic 3 Forced Vibration of Multi-Degree-of-Freedom Systems - IDocument4 pagesTopic 3 Forced Vibration of Multi-Degree-of-Freedom Systems - IstefanPas encore d'évaluation
- University of She Eld Department of Mechanical Engineering MEC 308: Applied Noise and Vibration Tutorial 1Document13 pagesUniversity of She Eld Department of Mechanical Engineering MEC 308: Applied Noise and Vibration Tutorial 1fastman94Pas encore d'évaluation
- Tutorial 1Document6 pagesTutorial 1fastman94Pas encore d'évaluation
- Report On Magnetic Levitation System ModellingDocument6 pagesReport On Magnetic Levitation System ModellingSteve Goke AyeniPas encore d'évaluation
- Modelling and Identification of A Non-Linear Saturated Magnetic Circuit: Theoretical Study and Experimental ResultsDocument14 pagesModelling and Identification of A Non-Linear Saturated Magnetic Circuit: Theoretical Study and Experimental ResultsGustavo LimaPas encore d'évaluation
- 6 - Equation of Motion of MDOF Elastic SystemsDocument5 pages6 - Equation of Motion of MDOF Elastic Systemsengsam777Pas encore d'évaluation
- Modified Non-Stationary Critical Input Excitation by A Design Oriented Objective FunctionDocument20 pagesModified Non-Stationary Critical Input Excitation by A Design Oriented Objective FunctionAmir SaudPas encore d'évaluation
- Design Formulas For Tuned Mass Dampers Based O N A Perturbation TechniqueDocument22 pagesDesign Formulas For Tuned Mass Dampers Based O N A Perturbation TechniqueAngshuman AdhikaryPas encore d'évaluation
- On The Approximate Analytical Solution To Non-Linear Oscillation SystemsDocument11 pagesOn The Approximate Analytical Solution To Non-Linear Oscillation SystemsC V CHANDRASHEKARAPas encore d'évaluation
- Chapter 3 - Forced Vibration of Multi-Degree-of-Freedom SystemsDocument4 pagesChapter 3 - Forced Vibration of Multi-Degree-of-Freedom SystemsAnonymous LcR6ykPBTPas encore d'évaluation
- Wave-Vector Diagrams For Two-Dimensional Photonic CrystalsDocument9 pagesWave-Vector Diagrams For Two-Dimensional Photonic CrystalsNguyen Sy Thanh SonPas encore d'évaluation
- ProjetStar Meziane MahaDocument15 pagesProjetStar Meziane MahaMaha MezianePas encore d'évaluation
- Swing-Up: Aind Balancing Control B OtDocument4 pagesSwing-Up: Aind Balancing Control B Otkhushal bhanderiPas encore d'évaluation
- Chapter 4 - Modal Analysis: CEE490bDocument22 pagesChapter 4 - Modal Analysis: CEE490bAnonymous LcR6ykPBTPas encore d'évaluation
- Time-Machine in Electromagnetic Field: Ming Shen Qing-You SunDocument6 pagesTime-Machine in Electromagnetic Field: Ming Shen Qing-You Sunsmss_proe5945Pas encore d'évaluation
- Research Inventy: International Journal of Engineering and ScienceDocument5 pagesResearch Inventy: International Journal of Engineering and ScienceresearchinventyPas encore d'évaluation
- EmonopolDocument3 pagesEmonopolFlavio FontanaPas encore d'évaluation
- Thermal State of The General Time-Dependent Harmonic OscillatorDocument14 pagesThermal State of The General Time-Dependent Harmonic OscillatorSajjad ZafarPas encore d'évaluation
- Turgeman (Ub 1982)Document20 pagesTurgeman (Ub 1982)Paramita BhattacharyaPas encore d'évaluation
- Modeling and Simulation of A Series Resonant InverterDocument6 pagesModeling and Simulation of A Series Resonant InverterkaaisPas encore d'évaluation
- 4 Operational Modal Analysis Using Asynchronous Data For Frequencies and Mode Shapes IdentificationDocument5 pages4 Operational Modal Analysis Using Asynchronous Data For Frequencies and Mode Shapes Identificationsoorena fayazmaneshPas encore d'évaluation
- Wilberforce 4Document6 pagesWilberforce 4hafsa kamalPas encore d'évaluation
- Two Charged Particles in The Plane Under A Constant Perpendicular Magnetic FieldDocument10 pagesTwo Charged Particles in The Plane Under A Constant Perpendicular Magnetic FieldMo SaPas encore d'évaluation
- Smart Materials and Structures: International WorkshopDocument10 pagesSmart Materials and Structures: International WorkshopPartha SarathiiPas encore d'évaluation
- Coupled Masses On Springs - Properties of The PropagatorDocument3 pagesCoupled Masses On Springs - Properties of The Propagatorsayandatta1Pas encore d'évaluation
- A Recipe For Stability Analysis of Finite-Difference Wave Equation ComputationsDocument6 pagesA Recipe For Stability Analysis of Finite-Difference Wave Equation ComputationsYoyaa WllPas encore d'évaluation
- Dynamic Response of A Circular Plate To A Moving Load: Erol Uzal L. Emir SakmanDocument9 pagesDynamic Response of A Circular Plate To A Moving Load: Erol Uzal L. Emir SakmanyasameenPas encore d'évaluation
- 7 Sem Past - PapersDocument13 pages7 Sem Past - Papersatif naeemPas encore d'évaluation
- The Structure of The Vacuum and The Photon NumberDocument9 pagesThe Structure of The Vacuum and The Photon NumberI.B. BirulaPas encore d'évaluation
- Printerversion Modal Analysis OldDocument8 pagesPrinterversion Modal Analysis OldSalvador SilveyraPas encore d'évaluation
- Amm 303-306 1706Document5 pagesAmm 303-306 1706Ahmed MohsenPas encore d'évaluation
- A Review of Dynamic Models Used in Simulation of Gear TransmissionsDocument10 pagesA Review of Dynamic Models Used in Simulation of Gear TransmissionsKhalid F AbdulraheemPas encore d'évaluation
- Quadrature Methods For Integral Equations of The Second Kind Over Infinite IntervalsDocument13 pagesQuadrature Methods For Integral Equations of The Second Kind Over Infinite IntervalsFizzerPas encore d'évaluation
- 2017 ICSV Det of Unb in A Ror BRG SystemDocument7 pages2017 ICSV Det of Unb in A Ror BRG SystemAka ShriPas encore d'évaluation
- Structural Dynamics Coursework 22Document25 pagesStructural Dynamics Coursework 22TahirAEDPas encore d'évaluation
- Optimal Topology Design For Replaceable of Reticulated Shell Based On Sensitivity AnalysisDocument10 pagesOptimal Topology Design For Replaceable of Reticulated Shell Based On Sensitivity AnalysissowgPas encore d'évaluation
- Capitulo 9 Practical MATLAB Modeling With Simulink Programming and SimulatingDocument50 pagesCapitulo 9 Practical MATLAB Modeling With Simulink Programming and SimulatingEduardo RobleroPas encore d'évaluation
- Murakami - Analysis of Stress Intensity Factors of Modes I, II and III For Inclined Surface Cracks of Arbitrary ShapeDocument14 pagesMurakami - Analysis of Stress Intensity Factors of Modes I, II and III For Inclined Surface Cracks of Arbitrary ShapeDavid C HouserPas encore d'évaluation
- Competitive Nonlinear PricingDocument13 pagesCompetitive Nonlinear PricingDiego SosaPas encore d'évaluation
- Modal Mass, Stiffness and DampingDocument5 pagesModal Mass, Stiffness and Dampingkudrilya100% (1)
- Analytic Solutions of Fractional Differential Equation Associated With RLC Electrical CircuitDocument9 pagesAnalytic Solutions of Fractional Differential Equation Associated With RLC Electrical CircuitMohamed HelalPas encore d'évaluation
- Building A Passive Robot For Active LearningDocument5 pagesBuilding A Passive Robot For Active LearningsekkarvelPas encore d'évaluation
- Notes On Effective Masses PDFDocument6 pagesNotes On Effective Masses PDFdiosjirehPas encore d'évaluation
- Notes On Effective Masses: Ij I JDocument6 pagesNotes On Effective Masses: Ij I Jright12351Pas encore d'évaluation
- Bare ChargeDocument7 pagesBare ChargeQUAH KAH CHUN UPSIPas encore d'évaluation
- Free Vibration Analysis: Multi-Degree of Freedom Systems - ReviewDocument10 pagesFree Vibration Analysis: Multi-Degree of Freedom Systems - ReviewMelih EmrePas encore d'évaluation
- 13 Modes PDFDocument18 pages13 Modes PDFAhmed RashedPas encore d'évaluation
- Dynamic Analysis Using Mode SuperpositionDocument18 pagesDynamic Analysis Using Mode Superpositiondvelchev5526Pas encore d'évaluation
- 13 Modes PDFDocument18 pages13 Modes PDFAhmed RashedPas encore d'évaluation
- Rigid Rotor Induced DipoleDocument7 pagesRigid Rotor Induced Dipolepero_scribdPas encore d'évaluation
- Complex Arithmetic Through CordicDocument11 pagesComplex Arithmetic Through CordicZhi ChenPas encore d'évaluation
- Mechanical Vibrations: Peter Avitabile Mechanical Engineering Department University of Massachusetts LowellDocument22 pagesMechanical Vibrations: Peter Avitabile Mechanical Engineering Department University of Massachusetts LowellabbasreisianPas encore d'évaluation
- Notes On Effective MassesV4Document4 pagesNotes On Effective MassesV4aakashPas encore d'évaluation
- FIR 05 Dynamics PDFDocument65 pagesFIR 05 Dynamics PDFselvamPas encore d'évaluation
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiD'EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiPas encore d'évaluation
- Tables of Coulomb Wave Functions: Whittaker FunctionsD'EverandTables of Coulomb Wave Functions: Whittaker FunctionsPas encore d'évaluation
- Nonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002Document1 pageNonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002stefanPas encore d'évaluation
- Nonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002Document2 pagesNonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002stefanPas encore d'évaluation
- ASEN 5107 First Midterm Quiz. Fall 2001 Solutions: R L U LDocument1 pageASEN 5107 First Midterm Quiz. Fall 2001 Solutions: R L U LstefanPas encore d'évaluation
- Nonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002Document1 pageNonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002stefanPas encore d'évaluation
- Nonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002Document1 pageNonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002stefanPas encore d'évaluation
- Nonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002Document1 pageNonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002stefanPas encore d'évaluation
- Nonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002Document1 pageNonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002stefanPas encore d'évaluation
- Review of Sdof Concepts: CEE490b Jan. 7, 2002Document7 pagesReview of Sdof Concepts: CEE490b Jan. 7, 2002stefanPas encore d'évaluation
- Nonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002Document1 pageNonlinear Finite Element Analysis: Mema/Cses 648 Spring 2002stefanPas encore d'évaluation
- Topic 6bDocument4 pagesTopic 6bstefanPas encore d'évaluation
- Topic 6Document11 pagesTopic 6stefanPas encore d'évaluation
- CEE490b Jan. 7, 2002 Topic 7 10. FatigueDocument7 pagesCEE490b Jan. 7, 2002 Topic 7 10. FatiguestefanPas encore d'évaluation
- Topic 1 Free Vibration of Multi-Degree-of-Freedom Systems: CEE490b Jan. 9, 2002Document8 pagesTopic 1 Free Vibration of Multi-Degree-of-Freedom Systems: CEE490b Jan. 9, 2002stefanPas encore d'évaluation
- Structural Damage Identification by Using Energy Transfer RatioDocument8 pagesStructural Damage Identification by Using Energy Transfer RatiostefanPas encore d'évaluation
- CEE490b Mar. 25, 2002 Topic 7 10a. FATIGUE - Part 2: N Cycles To FailureDocument7 pagesCEE490b Mar. 25, 2002 Topic 7 10a. FATIGUE - Part 2: N Cycles To FailurestefanPas encore d'évaluation
- Review of Random Loading Concepts IIDocument6 pagesReview of Random Loading Concepts IIstefanPas encore d'évaluation
- Multiple Discrete Loads: CEE490b Mar. 11, 2002Document5 pagesMultiple Discrete Loads: CEE490b Mar. 11, 2002stefanPas encore d'évaluation
- 6.1 Modal Analysis of Civil Engineering StructuresDocument20 pages6.1 Modal Analysis of Civil Engineering StructuresstefanPas encore d'évaluation
- 9 Experimental Case No. 2: 9.1 Data Acquisition and Signal ProcessingDocument16 pages9 Experimental Case No. 2: 9.1 Data Acquisition and Signal ProcessingstefanPas encore d'évaluation
- 3 Continuous-Time Structural SystemsDocument24 pages3 Continuous-Time Structural SystemsstefanPas encore d'évaluation
- 8 Experimental Case No. 1: 8.1 A Simulation Study of A Five Storey StructureDocument40 pages8 Experimental Case No. 1: 8.1 A Simulation Study of A Five Storey StructurestefanPas encore d'évaluation
- 5 Identification Using Prediction Error Methods: Nap NC, Model Will Be Addressed. inDocument24 pages5 Identification Using Prediction Error Methods: Nap NC, Model Will Be Addressed. instefanPas encore d'évaluation
- Graph Functions Worksheet #01, Algebra Revision From GCSE Maths TutorDocument2 pagesGraph Functions Worksheet #01, Algebra Revision From GCSE Maths TutorgcsemathstutorPas encore d'évaluation
- Chapter 5 - The Vector Space RNDocument54 pagesChapter 5 - The Vector Space RNDương Đặng MinhPas encore d'évaluation
- 01 TrabajoDocument18 pages01 TrabajoYuliza Carolina Capuñay SiesquenPas encore d'évaluation
- Opuscula Math 3205 PDFDocument8 pagesOpuscula Math 3205 PDFAntonio Torres PeñaPas encore d'évaluation
- VC 2 PDFDocument145 pagesVC 2 PDFAkhil BajaPas encore d'évaluation
- U5D6 Special Angles Extra Practice Worksheet 5 3 1 2Document1 pageU5D6 Special Angles Extra Practice Worksheet 5 3 1 2lou smithPas encore d'évaluation
- 18.102 Introduction To Functional Analysis: Mit OpencoursewareDocument5 pages18.102 Introduction To Functional Analysis: Mit OpencoursewareLộc MaiPas encore d'évaluation
- Matrix Multiplication Program in 8086 Assembly LanguageDocument5 pagesMatrix Multiplication Program in 8086 Assembly Languageroshan2468Pas encore d'évaluation
- Transformations PracticeDocument11 pagesTransformations PracticeRomba拉Pas encore d'évaluation
- Formulario Calculo Dif - IntegralDocument4 pagesFormulario Calculo Dif - IntegralRocki R SebastiánPas encore d'évaluation
- Chapter 1 FunctionsDocument7 pagesChapter 1 FunctionsCt KursiahPas encore d'évaluation
- The Sphere Packing Problem in Dimension 8: Maryna S. Viazovska April 5, 2017Document24 pagesThe Sphere Packing Problem in Dimension 8: Maryna S. Viazovska April 5, 2017Cazimir BostanPas encore d'évaluation
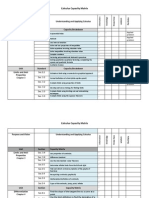
- Calculus Capcity Matrix Second Sememster 13 14Document8 pagesCalculus Capcity Matrix Second Sememster 13 14api-245300570Pas encore d'évaluation
- 01-Sets, Relations, FunctionsDocument25 pages01-Sets, Relations, Functionssumanth100% (1)
- Ae2235 Exercises Lecture 1Document6 pagesAe2235 Exercises Lecture 1Sarieta SarrahPas encore d'évaluation
- Unit 3 Chapter 3 (Limits and Continuity)Document9 pagesUnit 3 Chapter 3 (Limits and Continuity)secretsuperstarPas encore d'évaluation
- Fourier Series - MCQDocument3 pagesFourier Series - MCQSumdawng LianaPas encore d'évaluation
- Math Sem IV Imp 2018Document2 pagesMath Sem IV Imp 2018S N KPas encore d'évaluation
- Analysis II MS Sol 2015-16Document3 pagesAnalysis II MS Sol 2015-16Mainak SamantaPas encore d'évaluation
- Gen-Math-Work-Text-Operations and Composition-Of-FunctionsDocument9 pagesGen-Math-Work-Text-Operations and Composition-Of-FunctionsIRIS JEAN BRIAGASPas encore d'évaluation
- (Seminars in Mathematics 11) N. M. Ivochkina, A. P. Oskolkov (Auth.), O. A. Ladyzhenskaya (Eds.) - Boundary Value Problems of Mathematical Physics and Related Aspects of Function Theory-SpringerDocument86 pages(Seminars in Mathematics 11) N. M. Ivochkina, A. P. Oskolkov (Auth.), O. A. Ladyzhenskaya (Eds.) - Boundary Value Problems of Mathematical Physics and Related Aspects of Function Theory-SpringerAurelian SolonPas encore d'évaluation
- Associated Laguerre PolynomialsDocument9 pagesAssociated Laguerre PolynomialsScottCracerPas encore d'évaluation
- L-1 - Indefinite Integration PDFDocument36 pagesL-1 - Indefinite Integration PDFSubham SharmaPas encore d'évaluation
- Assignment 3Document3 pagesAssignment 3prachikumar04Pas encore d'évaluation
- Haar Wavelet Image CompressionDocument8 pagesHaar Wavelet Image Compressionsanthosh kumarPas encore d'évaluation
- Use LU Decomposition To Determine The Matrix Inverse For The - QuizletDocument5 pagesUse LU Decomposition To Determine The Matrix Inverse For The - QuizlettestingitPas encore d'évaluation
- MatrixDocument26 pagesMatrixBattleBeex rabinoPas encore d'évaluation
- FunctionDocument17 pagesFunctionsuar90Pas encore d'évaluation