Vous aimerez peut-être aussi
- Windows 10 2020 - 1Document50 pagesWindows 10 2020 - 1MaribelPas encore d'évaluation
- Prueba de Las CorridasDocument6 pagesPrueba de Las CorridasMaribelPas encore d'évaluation
- Diagrama de Actividades 1 - 2021Document10 pagesDiagrama de Actividades 1 - 2021MaribelPas encore d'évaluation
- Estudio de TiemposDocument7 pagesEstudio de TiemposMaribelPas encore d'évaluation
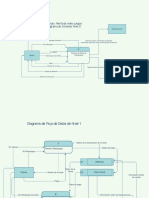
- DFD Renta de VideosDocument9 pagesDFD Renta de Videosliseth cabezas100% (1)
- Prueba de Las CorridasDocument6 pagesPrueba de Las CorridasMaribelPas encore d'évaluation
- Tema 1 Ejercicios Resueltos IND246012020Document2 pagesTema 1 Ejercicios Resueltos IND246012020MaribelPas encore d'évaluation
- ZaraDocument7 pagesZaraMaribelPas encore d'évaluation
- Practica N 2 Sistema CerradoDocument21 pagesPractica N 2 Sistema CerradoMaribelPas encore d'évaluation
- Informe 2 de Laboratorio de Fisica 200Document8 pagesInforme 2 de Laboratorio de Fisica 200MaribelPas encore d'évaluation
- PRACTICA N 1 Laboratorio de FisicaDocument2 pagesPRACTICA N 1 Laboratorio de FisicaMaribelPas encore d'évaluation
- Integración de Equipos Active DirectoryDocument3 pagesIntegración de Equipos Active DirectoryCorrales44Pas encore d'évaluation
- GuiaRapidaV 32FBDocument1 pageGuiaRapidaV 32FBJunior CedeñoPas encore d'évaluation
- Relacion 4Document15 pagesRelacion 4Tomás Fernández CoronadoPas encore d'évaluation
- Ejercicios Python 1 Al 4Document4 pagesEjercicios Python 1 Al 4Yang Huayapa CcariPas encore d'évaluation
- Directorio Agencias y Outsourcing Enero 2019Document12 pagesDirectorio Agencias y Outsourcing Enero 2019oscarPas encore d'évaluation
- Diseño de Un Sistema de Gestion de Procesos para El Area de Embotellado de Cerveceria Nacional C N Planta QuitoDocument128 pagesDiseño de Un Sistema de Gestion de Procesos para El Area de Embotellado de Cerveceria Nacional C N Planta QuitoJaime VargasPas encore d'évaluation
- Kaspersky OSDocument2 pagesKaspersky OSHéctor QuezadaPas encore d'évaluation
- Aplicaciones en La NubeDocument362 pagesAplicaciones en La NubeReme AguilarPas encore d'évaluation
- Delincuencia UrbanaDocument17 pagesDelincuencia UrbanaVasili VasiliPas encore d'évaluation
- Propuesta Ptdi La Asunta 30.03.2022 ADocument22 pagesPropuesta Ptdi La Asunta 30.03.2022 ARomito MForeverPas encore d'évaluation
- Plantilla para El Informe de Fallas y ErroresDocument10 pagesPlantilla para El Informe de Fallas y ErroresWilliams Mar100% (1)
- 01 Instructivo - de - Configuracion - en - Campo - Tellabs - 7300 - 2013 - 05 - 06 - Rev05Document30 pages01 Instructivo - de - Configuracion - en - Campo - Tellabs - 7300 - 2013 - 05 - 06 - Rev05Armin Hernández100% (1)
- Introducción IA Agentes Inteligentes 01Document9 pagesIntroducción IA Agentes Inteligentes 01Stephen QueenPas encore d'évaluation
- Soluciones Vectores. SelectividadDocument11 pagesSoluciones Vectores. SelectividadJJ JossPas encore d'évaluation
- Percepcion VisualDocument6 pagesPercepcion VisualAgustín Eduardo RodríguezPas encore d'évaluation
- Control Motor A PasosDocument16 pagesControl Motor A PasosEmanuel ANTRAXDPas encore d'évaluation
- Calculo de Necesidades - ReclutamientoDocument10 pagesCalculo de Necesidades - ReclutamientoCarol Valeria Uribe DobsonPas encore d'évaluation
- 2 Flutter-For-Dummies - Compress-062-156-.En - EsDocument95 pages2 Flutter-For-Dummies - Compress-062-156-.En - EsPepa LeónPas encore d'évaluation
- Caracteristicas RT Feature ESDocument13 pagesCaracteristicas RT Feature ESNavarro Nayra100% (1)
- D02 GrafcetDocument30 pagesD02 GrafcetfcabreraibanezPas encore d'évaluation
- Desambiguación Del Término Pruebas Unitarias: Las Pruebas Unitarias de Un Desarrollador Por Lo General Lucen AsíDocument1 pageDesambiguación Del Término Pruebas Unitarias: Las Pruebas Unitarias de Un Desarrollador Por Lo General Lucen AsíepilefPas encore d'évaluation
- Informe #1 - RetroexcavadoraDocument17 pagesInforme #1 - RetroexcavadoraHeber ArcanaPas encore d'évaluation
- EJERCICIO 1 EstadisticaDocument2 pagesEJERCICIO 1 EstadisticaAldo R-dPas encore d'évaluation
- Autentificacion DHCP Con Radius Tamaño MinimoDocument29 pagesAutentificacion DHCP Con Radius Tamaño MinimoPaul Fernando Pulla MerchanPas encore d'évaluation
- Presentacion Indicadores ERI-ERU - ListoDocument19 pagesPresentacion Indicadores ERI-ERU - ListoDeyver Jandwer Chavez Cordova33% (3)
- Word Basico 2010Document255 pagesWord Basico 2010Jimy ChoquehuancaPas encore d'évaluation
- Reporte de C CuatriplicadorDocument4 pagesReporte de C CuatriplicadorBryan Giovanni Rodríguez CastilloPas encore d'évaluation
- TESIS Rev.5 1Document21 pagesTESIS Rev.5 1jvsv11100% (1)
- ME902AMI2022 matematicaIIDocument7 pagesME902AMI2022 matematicaIISILVIA GABRIELA PUMA AYSAPas encore d'évaluation
- Devenir Historico Del Colegio de Bachillerato Técnico IndustrialDocument17 pagesDevenir Historico Del Colegio de Bachillerato Técnico IndustrialMaría Camila PortillaPas encore d'évaluation