Vous aimerez peut-être aussi
- Credenciales CBTIS 151Document4 pagesCredenciales CBTIS 151nursing forever0% (1)
- Administración moderna centrada en estrategiaDocument3 pagesAdministración moderna centrada en estrategiaJulio CarrilloPas encore d'évaluation
- Resumen Del Manual de Oslo - InnovaciónDocument6 pagesResumen Del Manual de Oslo - InnovacióndavidPas encore d'évaluation
- Analisis y Diseño de SistemasDocument15 pagesAnalisis y Diseño de SistemasAlex Edgar VpmPas encore d'évaluation
- PracticaDocument3 pagesPracticajose manuel lopez vidal100% (2)
- 1ra Práctic Termo 2 2020 GBDocument1 page1ra Práctic Termo 2 2020 GBAlejandro Estrada CarrascoPas encore d'évaluation
- Ejercicio 3Document1 pageEjercicio 3Alejandro Estrada CarrascoPas encore d'évaluation
- INICIATIVASDocument1 pageINICIATIVASAlejandro Estrada CarrascoPas encore d'évaluation
- Pronostico de VentasDocument2 pagesPronostico de VentasantoniPas encore d'évaluation
- Cálculo de Soldadura A La Sección 3Document3 pagesCálculo de Soldadura A La Sección 3Alejandro Estrada CarrascoPas encore d'évaluation
- 1ra Práctic Termo 2 2020 GBDocument1 page1ra Práctic Termo 2 2020 GBAlejandro Estrada CarrascoPas encore d'évaluation
- 3ra Práctica Termo 2 GB 02020Document1 page3ra Práctica Termo 2 GB 02020Alejandro Estrada CarrascoPas encore d'évaluation
- Cálculo de Soldadura A La Sección 3Document3 pagesCálculo de Soldadura A La Sección 3Alejandro Estrada CarrascoPas encore d'évaluation
- Fundamentos para La Microfinanzas: Docente: Mgr. Econ. Jaime Serapio Carpio BandaDocument9 pagesFundamentos para La Microfinanzas: Docente: Mgr. Econ. Jaime Serapio Carpio BandaAlejandro Estrada CarrascoPas encore d'évaluation
- Cálculo de Soldadura A La Sección 3Document3 pagesCálculo de Soldadura A La Sección 3Alejandro Estrada CarrascoPas encore d'évaluation
- Práctica 10Document1 pagePráctica 10Alejandro Estrada CarrascoPas encore d'évaluation
- Cuadro ResumenDocument1 pageCuadro ResumenAlejandro Estrada CarrascoPas encore d'évaluation
- GloriaDocument2 pagesGloriaAlejandro Estrada CarrascoPas encore d'évaluation
- Ejercicio 3Document1 pageEjercicio 3Alejandro Estrada CarrascoPas encore d'évaluation
- Tesis de Grado: Ingeniero MecánicoDocument147 pagesTesis de Grado: Ingeniero MecánicocarlosveraveraPas encore d'évaluation
- Che PDFDocument1 pageChe PDFAlejandro Estrada CarrascoPas encore d'évaluation
- Ejercicio 3Document1 pageEjercicio 3Alejandro Estrada CarrascoPas encore d'évaluation
- Informe Autotransformador PDFDocument14 pagesInforme Autotransformador PDFAlejandro Estrada CarrascoPas encore d'évaluation
- CLIMATIZADORDocument6 pagesCLIMATIZADORAlejandro Estrada CarrascoPas encore d'évaluation
- Tesis de Grado: Ingeniero MecánicoDocument147 pagesTesis de Grado: Ingeniero MecánicocarlosveraveraPas encore d'évaluation
- CURSO DE TERMODINAMICA JJMG 2014 Entropia PDFDocument19 pagesCURSO DE TERMODINAMICA JJMG 2014 Entropia PDFAlejandro Estrada CarrascoPas encore d'évaluation
- Arm Nicos en Redes El Ctricas PDFDocument33 pagesArm Nicos en Redes El Ctricas PDFJonathan SilvaPas encore d'évaluation
- Informe Autotransformador PDFDocument14 pagesInforme Autotransformador PDFAlejandro Estrada CarrascoPas encore d'évaluation
- Capitulo 2Document7 pagesCapitulo 2Alejandro Estrada CarrascoPas encore d'évaluation
- Ejercicios Con Diodos 2Document11 pagesEjercicios Con Diodos 2mcals123Pas encore d'évaluation
- Informe 2Document6 pagesInforme 2Alejandro Estrada CarrascoPas encore d'évaluation
- 1 PDFDocument3 pages1 PDFAlejandro Estrada CarrascoPas encore d'évaluation
- Present SimpleDocument1 pagePresent SimpleAlejandro Estrada CarrascoPas encore d'évaluation
- Expo Tecnologia AutomotrizDocument27 pagesExpo Tecnologia AutomotrizAlejandro Estrada CarrascoPas encore d'évaluation
- Listado de Asistencia Técnica Básica Diciembre 2018 PDFDocument167 pagesListado de Asistencia Técnica Básica Diciembre 2018 PDFrisanchezmPas encore d'évaluation
- Monitoreo Del Plan Elac 2010Document105 pagesMonitoreo Del Plan Elac 2010Homero EnriquezPas encore d'évaluation
- SQM DefinitivoDocument52 pagesSQM DefinitivoManuel AlvaradoPas encore d'évaluation
- Resunen Rite de 1Document36 pagesResunen Rite de 1mabelPas encore d'évaluation
- Informe 1 - Procesos ProductivosDocument5 pagesInforme 1 - Procesos ProductivosJeffry Segura Arias50% (2)
- Especialización Voladuras y Especialización ExplosivosDocument31 pagesEspecialización Voladuras y Especialización ExplosivosAdriana Mesa ChaparroPas encore d'évaluation
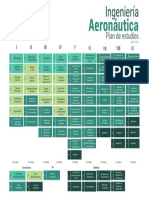
- Plan Estudios Ingenieria AeronauticaDocument1 pagePlan Estudios Ingenieria AeronauticaGoodLockPas encore d'évaluation
- Diseño Curricular - Interpretación de Planos para Maquinaria IndustrialDocument4 pagesDiseño Curricular - Interpretación de Planos para Maquinaria Industrialivancho310Pas encore d'évaluation
- Importancia alta dirección TIDocument2 pagesImportancia alta dirección TIMariana GzmnPas encore d'évaluation
- Análisis de tráfico vial mediante aforos de 5 y 15 minutosDocument11 pagesAnálisis de tráfico vial mediante aforos de 5 y 15 minutoscaryumPas encore d'évaluation
- 2 Envio TesisDocument6 pages2 Envio TesisRoly Pariona SilvaPas encore d'évaluation
- Cv-Ing - Civil.quiroz DueñasDocument1 pageCv-Ing - Civil.quiroz DueñasGuillermo Pachas Diaz0% (1)
- Anuario Estadistico 2016Document331 pagesAnuario Estadistico 2016Marco Antonio Villar HerreraPas encore d'évaluation
- ¿Por Qué Enseñar Ciencias y Matemática "Papel de La Educación CTS en Una Alfabetización Científica y Tecnológica para Todas Las Personas"Document1 page¿Por Qué Enseñar Ciencias y Matemática "Papel de La Educación CTS en Una Alfabetización Científica y Tecnológica para Todas Las Personas"Catherine Hernandez TorresPas encore d'évaluation
- Análisis Egresados en Ingeniería IndustrialDocument13 pagesAnálisis Egresados en Ingeniería IndustrialEscuela Industriales UPMPas encore d'évaluation
- Guía Estudio Impacto AmbientalDocument27 pagesGuía Estudio Impacto AmbientalCory CarverPas encore d'évaluation
- Informe y Maqueta de MegaestructuraDocument3 pagesInforme y Maqueta de MegaestructuraAnonymous xn4xmZ7mPas encore d'évaluation
- Descripción CicloviaDocument3 pagesDescripción CicloviaCarlosPas encore d'évaluation
- Infografia de Ingenieria en Carretera SustentableDocument2 pagesInfografia de Ingenieria en Carretera SustentableMayo Diaz NicolasaPas encore d'évaluation
- Proyecto Robot CaseroDocument10 pagesProyecto Robot CaseroMau Lopez VazquezPas encore d'évaluation
- Cooperación EEUU-Perú en ciencia y tecnologíaDocument1 pageCooperación EEUU-Perú en ciencia y tecnologíapatricia pazcePas encore d'évaluation
- Temario y Portada Del CursoDocument4 pagesTemario y Portada Del CursoRamon Emmanuel Luna VazquezPas encore d'évaluation
- Formulario Introducción IIDocument2 pagesFormulario Introducción IIAlejandra Silva SilvaPas encore d'évaluation
- Conceptos Básicos de Ecología y Medio AmbienteDocument7 pagesConceptos Básicos de Ecología y Medio Ambientealexra_76Pas encore d'évaluation
- La Sociedad de La Información PDFDocument2 pagesLa Sociedad de La Información PDFKlaus CRPas encore d'évaluation
- Perfil de La Idea de NegocioDocument4 pagesPerfil de La Idea de NegocioCarito GaleanoPas encore d'évaluation