Vous aimerez peut-être aussi
- Teresa of Avila - The Life of ST Teresa, A Carmelite Nun Reprint 1912Document674 pagesTeresa of Avila - The Life of ST Teresa, A Carmelite Nun Reprint 1912WaterwindPas encore d'évaluation
- MTC Test Nescom 14 May, 2019 AM ElectronicsDocument9 pagesMTC Test Nescom 14 May, 2019 AM ElectronicsIsha Hussain86% (14)
- Precision Nutrition. Nutrient TimingDocument21 pagesPrecision Nutrition. Nutrient TimingPaolo AltoéPas encore d'évaluation
- Digital and Non-Linear Control: Frequency Domain AnalysisDocument53 pagesDigital and Non-Linear Control: Frequency Domain AnalysisSonam AlviPas encore d'évaluation
- Control System MCQDocument9 pagesControl System MCQAlka GoyalPas encore d'évaluation
- Lecture 9-10 - Frequency Response MethodsDocument68 pagesLecture 9-10 - Frequency Response MethodsDerrick Maatla Moadi100% (1)
- Compulsory CounterclaimDocument4 pagesCompulsory CounterclaimAlexandria FernandoPas encore d'évaluation
- Medication Instructions Prior To SurgeryDocument11 pagesMedication Instructions Prior To Surgeryhohj100% (1)
- Bago Project CharterDocument6 pagesBago Project CharterLarize BautistaPas encore d'évaluation
- Gein, EdDocument10 pagesGein, Edpetru_k1Pas encore d'évaluation
- Discrete Wavelet Transform: A Signal Processing ApproachD'EverandDiscrete Wavelet Transform: A Signal Processing ApproachÉvaluation : 5 sur 5 étoiles5/5 (2)
- Spotify Strategig Possining and Product Life Cycle Four Basic Stages.Document5 pagesSpotify Strategig Possining and Product Life Cycle Four Basic Stages.Jorge YeshayahuPas encore d'évaluation
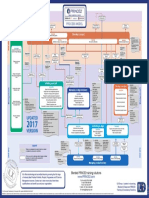
- p2 Process Model 2017Document1 pagep2 Process Model 2017Miguel Fernandes0% (1)
- The Prodigious MuseDocument466 pagesThe Prodigious Musesleepyninjitsu100% (1)
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsD'EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsPas encore d'évaluation
- Circuits 1Document4 pagesCircuits 1Antigoni KolisiatiPas encore d'évaluation
- Unit Iii Frequency ResponseDocument28 pagesUnit Iii Frequency ResponseRaghu RamPas encore d'évaluation
- 2020 FinalDocument3 pages2020 FinalBen ChouPas encore d'évaluation
- Mid-Sem II, April 2014 EE-1163, Control System: K (Ts+1) ) 2 (1 - + R (S) C (S)Document1 pageMid-Sem II, April 2014 EE-1163, Control System: K (Ts+1) ) 2 (1 - + R (S) C (S)S JainPas encore d'évaluation
- Cs ObjectiveDocument6 pagesCs Objectivevasece4537577100% (1)
- Lab 8: Butterworth FiltersDocument5 pagesLab 8: Butterworth FiltersJimtho MiraPas encore d'évaluation
- COE-EE 371 Lab ManualDocument65 pagesCOE-EE 371 Lab ManualDzramado Kennedy SolomonPas encore d'évaluation
- ELE302 - PreLab 3Document21 pagesELE302 - PreLab 3hughjass39.99Pas encore d'évaluation
- IES CONV Electronic Comm. 2000Document11 pagesIES CONV Electronic Comm. 2000gateandiesPas encore d'évaluation
- Gate Mock TestDocument15 pagesGate Mock TestTuhinansu PradhanPas encore d'évaluation
- Lab 7 - Frequency Response Computations: AgendaDocument8 pagesLab 7 - Frequency Response Computations: AgendaŞafakSelçukPas encore d'évaluation
- U2 Bode PlotDocument41 pagesU2 Bode PlotThalía LuceroPas encore d'évaluation
- Design of Digital Filters IIR, Butterworth FilterDocument8 pagesDesign of Digital Filters IIR, Butterworth FilterI am not a proPas encore d'évaluation
- Files 3-Lesson Notes Lecture 17Document6 pagesFiles 3-Lesson Notes Lecture 17kingboyPas encore d'évaluation
- Feedback Amplifier, Oscillator, BJT Application - Print - QuizizzDocument5 pagesFeedback Amplifier, Oscillator, BJT Application - Print - QuizizzRASHMI RANI SAMANTARAYPas encore d'évaluation
- Phase Shift Provided by One Phase Shift Network in RC Phase Shift Oscillator in 3 Stage IsDocument5 pagesPhase Shift Provided by One Phase Shift Network in RC Phase Shift Oscillator in 3 Stage IsJoyce GeorgePas encore d'évaluation
- r5220206 Control SystemsDocument1 pager5220206 Control SystemssivabharathamurthyPas encore d'évaluation
- JashuDocument204 pagesJashuPiyushsinhPas encore d'évaluation
- 5 D J 2017 - S 1C E VII 17:00/18:15H - T: Departamento de Engenharia Electrotécnica 1 E E III / R 3 T 17:00/20:00H - EDocument2 pages5 D J 2017 - S 1C E VII 17:00/18:15H - T: Departamento de Engenharia Electrotécnica 1 E E III / R 3 T 17:00/20:00H - EHelder CruzPas encore d'évaluation
- Linear Verse NonlinearDocument25 pagesLinear Verse NonlinearAnonymous fiIjnBPas encore d'évaluation
- Sampleproblems2 PDFDocument4 pagesSampleproblems2 PDFJose Martin Cisneros MandujanoPas encore d'évaluation
- Assignment 7Document8 pagesAssignment 7Subhankar ChakrabortyPas encore d'évaluation
- Elec Sheth MCQsDocument5 pagesElec Sheth MCQschandwani.bhawesh0270Pas encore d'évaluation
- Digital Oscillator: Final Mini Project Report OnDocument10 pagesDigital Oscillator: Final Mini Project Report OnNagendra KumarPas encore d'évaluation
- Design and Analysis of Multistage Amplifier Configurations: ObjectiveDocument12 pagesDesign and Analysis of Multistage Amplifier Configurations: ObjectivePreet PatelPas encore d'évaluation
- DSP QuestionsDocument8 pagesDSP Questionsjjshree79Pas encore d'évaluation
- QuesDocument13 pagesQuessanjujoshhi7550Pas encore d'évaluation
- ECEN325 Lab ManualDocument66 pagesECEN325 Lab ManualIrwan RamliPas encore d'évaluation
- EndSem EE602 2020 1 QpaperDocument3 pagesEndSem EE602 2020 1 QpaperAlex MarkPas encore d'évaluation
- MCQ 3,4Document18 pagesMCQ 3,4vijayalakshmiPas encore d'évaluation
- Lab 2 - ECE 223Document8 pagesLab 2 - ECE 223Lynn NguyenPas encore d'évaluation
- Design and Analysis of Multistage Amplifier Configurations: ObjectiveDocument19 pagesDesign and Analysis of Multistage Amplifier Configurations: ObjectivePreet PatelPas encore d'évaluation
- The Use of Volume Velocity Source in Transfer MeasurementsDocument6 pagesThe Use of Volume Velocity Source in Transfer Measurementsmicky1389Pas encore d'évaluation
- ADC Lab3 PDFDocument11 pagesADC Lab3 PDFFarhan NitratePas encore d'évaluation
- Gate - in 2010Document17 pagesGate - in 2010prabhjot singh1Pas encore d'évaluation
- 電子學 丙Document3 pages電子學 丙xilinx1384Pas encore d'évaluation
- Analog Circuits (Ecen 2101)Document5 pagesAnalog Circuits (Ecen 2101)sumitbhuia10Pas encore d'évaluation
- Mock Test 12 Eee QuestionsDocument11 pagesMock Test 12 Eee QuestionsrajkumarthatiPas encore d'évaluation
- Lec8 PDFDocument36 pagesLec8 PDFPhan Phuong NgocPas encore d'évaluation
- Lab ManualsDocument22 pagesLab ManualsHailRodPas encore d'évaluation
- Gate 2002 Exam Question KeysDocument20 pagesGate 2002 Exam Question KeysAman AnandPas encore d'évaluation
- ECE Viva Questions PDFDocument11 pagesECE Viva Questions PDFGanesh VishwakarmaPas encore d'évaluation
- Safe Check With SabaDocument1 pageSafe Check With Sabasaravanan.9344308178Pas encore d'évaluation
- Analog Electronics (0500625) SET 1Document8 pagesAnalog Electronics (0500625) SET 1Avinash PandeyPas encore d'évaluation
- CST QP With AnsDocument9 pagesCST QP With Ansvivin13carmelPas encore d'évaluation
- Filters 2Document60 pagesFilters 2Nguyễn Hoàng KhaPas encore d'évaluation
- Electronics III (Spring 2019) Midterm Examination (I)Document3 pagesElectronics III (Spring 2019) Midterm Examination (I)董育丞Pas encore d'évaluation
- ENTC 3320: Active FiltersDocument60 pagesENTC 3320: Active FiltersAbdullah NisarPas encore d'évaluation
- EEE - 208 - Final QuizDocument6 pagesEEE - 208 - Final QuizJavid Safiullah 100Pas encore d'évaluation
- Most Important Interview Questions For Electronics Communication EngineeringDocument11 pagesMost Important Interview Questions For Electronics Communication EngineeringPavan Kumar ThopaPas encore d'évaluation
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsD'EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsPas encore d'évaluation
- 10 1108 - JKM 01 2020 0064Document23 pages10 1108 - JKM 01 2020 0064BBA THESISPas encore d'évaluation
- Monkey Shine - ScriptDocument4 pagesMonkey Shine - Scriptapi-583045984Pas encore d'évaluation
- Prof Chase B. Wrenn - The True and The Good - A Strong Virtue Theory of The Value of Truth-Oxford University Press (2024)Document196 pagesProf Chase B. Wrenn - The True and The Good - A Strong Virtue Theory of The Value of Truth-Oxford University Press (2024)Mihaela DodiPas encore d'évaluation
- ComeniusDocument38 pagesComeniusDora ElenaPas encore d'évaluation
- Derivative Analysis HW1Document3 pagesDerivative Analysis HW1RahulSatijaPas encore d'évaluation
- Spanish Web PDFDocument36 pagesSpanish Web PDFSergio SayagoPas encore d'évaluation
- CHAPTER 6 - Adjusting EntriesDocument25 pagesCHAPTER 6 - Adjusting EntriesMuhammad AdibPas encore d'évaluation
- Sponsorship Details - IIT DelhiDocument4 pagesSponsorship Details - IIT DelhiRohit KumarPas encore d'évaluation
- Sampling Strategies For Heterogeneous WastesDocument18 pagesSampling Strategies For Heterogeneous Wastesmohammed karasnehPas encore d'évaluation
- Liquid Holdup in Large-Diameter Horizontal Multiphase PipelinesDocument8 pagesLiquid Holdup in Large-Diameter Horizontal Multiphase PipelinessaifoaPas encore d'évaluation
- SMF Update Barang 05 Desember 2022Document58 pagesSMF Update Barang 05 Desember 2022Apotek Ibnu RusydPas encore d'évaluation
- Myriam Met. CBLDocument25 pagesMyriam Met. CBLCamila EscobarPas encore d'évaluation
- Lecture - 4 - 28june2023Document18 pagesLecture - 4 - 28june2023vanshikaPas encore d'évaluation
- Beed 3a-Group 2 ResearchDocument65 pagesBeed 3a-Group 2 ResearchRose GilaPas encore d'évaluation
- MarshallingDocument7 pagesMarshallinggeetika singhPas encore d'évaluation
- MacbethDocument2 pagesMacbethjtwyfordPas encore d'évaluation
- Michelle Kommer Resignation LetterDocument1 pageMichelle Kommer Resignation LetterJeremy TurleyPas encore d'évaluation
- Birth and Growth of Semiotics: November 2020Document9 pagesBirth and Growth of Semiotics: November 2020Maria del Carmen Alvarado AcevedoPas encore d'évaluation
- BangaloreDocument1 229 pagesBangaloreVikas RanjanPas encore d'évaluation
- Pdf-To-Word EditedDocument48 pagesPdf-To-Word EditedJames Genesis Ignacio LolaPas encore d'évaluation
- 6 Ci Sinif Word Definition 6Document2 pages6 Ci Sinif Word Definition 6poladovaaysen11Pas encore d'évaluation