Vous aimerez peut-être aussi
- 4 - Aerodinamica Apicacion de Los Numeros ComplejosDocument14 pages4 - Aerodinamica Apicacion de Los Numeros ComplejosLuis Ls100% (2)
- EngraneDocument8 pagesEngraneMat angelPas encore d'évaluation
- Amenazas Económicas de América Latina y CaribeDocument3 pagesAmenazas Económicas de América Latina y CaribeMat angelPas encore d'évaluation
- Programacion - GSK GT40ADocument8 pagesProgramacion - GSK GT40AMat angelPas encore d'évaluation
- Torres CH Miguel CuestionarioDocument7 pagesTorres CH Miguel CuestionarioMat angelPas encore d'évaluation
- Programa 38 Corregido Torres MiguelDocument3 pagesPrograma 38 Corregido Torres MiguelMat angelPas encore d'évaluation
- Sistemas de Gobierno y Grupos de Poder en Norte AméricaDocument7 pagesSistemas de Gobierno y Grupos de Poder en Norte AméricaMat angelPas encore d'évaluation
- Termocupla Tipo JDocument8 pagesTermocupla Tipo JMat angelPas encore d'évaluation
- Bibliografias Unidad3Document3 pagesBibliografias Unidad3Mat angelPas encore d'évaluation
- Programa 38 Torno 2 Corregido Torres MiguelDocument3 pagesPrograma 38 Torno 2 Corregido Torres MiguelMat angelPas encore d'évaluation
- Medidas de SeguridadDocument4 pagesMedidas de SeguridadMat angelPas encore d'évaluation
- Analisis de Negociacion para La Terminacion Del ParoDocument1 pageAnalisis de Negociacion para La Terminacion Del ParoMat angelPas encore d'évaluation
- Informe Electr0 Proyecto FinalDocument8 pagesInforme Electr0 Proyecto FinalMat angelPas encore d'évaluation
- Torres MiguelDocument4 pagesTorres MiguelMat angelPas encore d'évaluation
- Medidas de SeguridadDocument10 pagesMedidas de SeguridadMat angelPas encore d'évaluation
- Dibujo 1Document1 pageDibujo 1Mat angelPas encore d'évaluation
- Informe-1 ContactorDocument6 pagesInforme-1 ContactorMat angelPas encore d'évaluation
- Informe 1 ContactorDocument11 pagesInforme 1 ContactorMat angelPas encore d'évaluation
- Clase 3 Grados de Libertad - Ley de GrashofDocument25 pagesClase 3 Grados de Libertad - Ley de GrashofMat angelPas encore d'évaluation
- Teoria de Controles EléctricosDocument14 pagesTeoria de Controles EléctricosJaspower90% (10)
- Informe 1Document17 pagesInforme 1Mat angelPas encore d'évaluation
- Acero Inoxidable TigDocument18 pagesAcero Inoxidable TigMat angelPas encore d'évaluation
- Cap1 y 4 Borde TigDocument16 pagesCap1 y 4 Borde TigMat angelPas encore d'évaluation
- ArtículoDocument8 pagesArtículoMat angelPas encore d'évaluation
- Termocupla Tipo J FinalDocument9 pagesTermocupla Tipo J FinalMat angelPas encore d'évaluation
- Graficar 3d MatlabDocument42 pagesGraficar 3d Matlabdilor19Pas encore d'évaluation
- Graficar 3d MatlabDocument42 pagesGraficar 3d Matlabdilor19Pas encore d'évaluation
- Curso Latex Ernesto ArandaDocument74 pagesCurso Latex Ernesto ArandaAlvaro Hernán Alarcón LópezPas encore d'évaluation
- Instrucciones Montaje CNCDocument4 pagesInstrucciones Montaje CNCAlvaro Norberto SilvaPas encore d'évaluation
- Trabajo Juniors Version2Document48 pagesTrabajo Juniors Version2YANETH TUCO CALLEPas encore d'évaluation
- Trabajo de Campo 5Document5 pagesTrabajo de Campo 5Diana TorresPas encore d'évaluation
- Prueba Biologia c2 1 Medio DifDocument3 pagesPrueba Biologia c2 1 Medio DifMarce SMPas encore d'évaluation
- DIA 2 Explicamos Los Beneficios de Los Aparatos Tecnológicos en La ComunicaciónDocument3 pagesDIA 2 Explicamos Los Beneficios de Los Aparatos Tecnológicos en La ComunicaciónZami LuceroPas encore d'évaluation
- PDFDocument0 pagePDFjulianm20Pas encore d'évaluation
- 001 - Estilo AcademicoDocument36 pages001 - Estilo Academicoalvarito_alejandroPas encore d'évaluation
- Monografia de Impacto AmbientalDocument17 pagesMonografia de Impacto AmbientalSherlopMedranoYanquePas encore d'évaluation
- Auditorías - EjemplosDocument17 pagesAuditorías - EjemplosKarla Alejandra Morales Briceño100% (2)
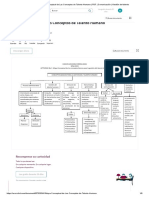
- Mapa Conceptual de Los Conceptos de Talento HumanoDocument6 pagesMapa Conceptual de Los Conceptos de Talento HumanoMarianna Mercado MejiaPas encore d'évaluation
- Estadística para QuímicosDocument228 pagesEstadística para QuímicosEVELINTCH0% (1)
- Tema 1 Lenguaje y ComunicacionDocument6 pagesTema 1 Lenguaje y ComunicacionegnatioPas encore d'évaluation
- DASDASDADASDocument19 pagesDASDASDADASDQPas encore d'évaluation
- 2 Guia Laboratorio Manual de PuestoDocument4 pages2 Guia Laboratorio Manual de PuestoKarla Romero VaqueranoPas encore d'évaluation
- Teoria Administrativa Unidad 1Document6 pagesTeoria Administrativa Unidad 1Victor BLPas encore d'évaluation
- ExamenDocument21 pagesExamenJuan Alonso Leandro NuñezPas encore d'évaluation
- SCstudentBR Aug15r3Document69 pagesSCstudentBR Aug15r3ElvisPas encore d'évaluation
- Mapa Conceptual 2Document1 pageMapa Conceptual 2AlejandraPas encore d'évaluation
- Cartilla Semilleros Investigacion 2017Document25 pagesCartilla Semilleros Investigacion 2017Daniela BohorquezPas encore d'évaluation
- Examen Parcial Resuelto CompletoDocument6 pagesExamen Parcial Resuelto CompletoLuisa QuitoPas encore d'évaluation
- Inventario Texas Revisado de Duelo (ITRD) (2005)Document6 pagesInventario Texas Revisado de Duelo (ITRD) (2005)bleuegirlmxPas encore d'évaluation
- Ejercicios (Parte 2) (Autoguardado)Document12 pagesEjercicios (Parte 2) (Autoguardado)Paco EspinozaPas encore d'évaluation
- Formato Actividad - S3 UVADocument8 pagesFormato Actividad - S3 UVAAngie HernándezPas encore d'évaluation
- Casos de Factorización.Document5 pagesCasos de Factorización.Don Venedic DormanPas encore d'évaluation
- Proyecto de TesisDocument40 pagesProyecto de TesisJOHAN GEORVIN HUILLCA CCASANIPas encore d'évaluation
- PIF Estados Financieros 2019-1 - Segunda EntregaDocument15 pagesPIF Estados Financieros 2019-1 - Segunda EntregaLaura GarzonPas encore d'évaluation
- Recursos Renovables y No RenovablesDocument3 pagesRecursos Renovables y No Renovablesvicenteayala32Pas encore d'évaluation
- ICPA GT 201 DurmientesDocument35 pagesICPA GT 201 DurmientesJulieta FantilePas encore d'évaluation
- Circuitos Electricos en DCDocument10 pagesCircuitos Electricos en DChugo martinez100% (1)
- Cap V Calidad Del Servicio - Conclusiones.Document11 pagesCap V Calidad Del Servicio - Conclusiones.Bárbara GonzálezPas encore d'évaluation
- Ensayo Sobre La Importancia de La Psicología Comunitaria para El Desarrollo Socioeconómico Del EcuadorDocument8 pagesEnsayo Sobre La Importancia de La Psicología Comunitaria para El Desarrollo Socioeconómico Del EcuadorCyber TronPas encore d'évaluation