Vous aimerez peut-être aussi
- Problemas resueltos de Hidráulica de CanalesD'EverandProblemas resueltos de Hidráulica de CanalesÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- Megado de Motores ElectricosDocument1 pageMegado de Motores Electricoscchebataroff90% (10)
- pae-PUERPERIO-QUIRURGICODocument75 pagespae-PUERPERIO-QUIRURGICOSalvaPas encore d'évaluation
- Problema 3Document34 pagesProblema 3Roma SobrevillaPas encore d'évaluation
- Diseño de Detalle de Una Maquina Peletizadora FinalDocument14 pagesDiseño de Detalle de Una Maquina Peletizadora FinalANA MARCELA ROSADO SILGADOPas encore d'évaluation
- OzO EXAMEN FINAL CIV-339, II.2020Document6 pagesOzO EXAMEN FINAL CIV-339, II.2020Alejandro Vitoria AriasPas encore d'évaluation
- 37 CurvaturaDocument7 pages37 CurvaturajoptionpanestryngPas encore d'évaluation
- ExamenDocument9 pagesExamenEdder CevyPas encore d'évaluation
- EJERCICIOS Movimiento Circular Uniforme 1Document3 pagesEJERCICIOS Movimiento Circular Uniforme 1Luis Alberto Garcia CaychoPas encore d'évaluation
- Calculos CangilonesDocument11 pagesCalculos Cangilonesnicole patricia mojica munozPas encore d'évaluation
- Diseño Hidraulico DesarenadorDocument13 pagesDiseño Hidraulico DesarenadorRega BrielPas encore d'évaluation
- CADENAS 5-2-2020 yDocument4 pagesCADENAS 5-2-2020 yjuanesteban2000Pas encore d'évaluation
- 1.1. ANGULO TRIGO. + RZ. TRIGON ANGULOAGUDO + IDENTIDADES TRIGO - Cteoria PDFDocument4 pages1.1. ANGULO TRIGO. + RZ. TRIGON ANGULOAGUDO + IDENTIDADES TRIGO - Cteoria PDFangie luciana yauli acostaPas encore d'évaluation
- DESARENADORDocument16 pagesDESARENADORhasta abajo garganta profunda 1Pas encore d'évaluation
- Diseño de Caida VerticalDocument6 pagesDiseño de Caida VerticalRogerMendezGutierrezPas encore d'évaluation
- Calculo de Arrastre de SedimentosDocument6 pagesCalculo de Arrastre de SedimentosAgustin fernandezPas encore d'évaluation
- Diseño de La Planta de TratamientoDocument5 pagesDiseño de La Planta de TratamientoSANTIAGO NICOLAS MENESES GUASMAYANPas encore d'évaluation
- Proyecto Hidraulica 17-6 CeciDocument32 pagesProyecto Hidraulica 17-6 CeciBoludeces TusPas encore d'évaluation
- Calculos BocatomaDocument7 pagesCalculos BocatomaRoasted ArepasPas encore d'évaluation
- ExamenDocument22 pagesExamenEdder CevyPas encore d'évaluation
- Practica 05 CinematicaDocument10 pagesPractica 05 CinematicaKARLA FIORELLA AGUIRRE QUINTANAPas encore d'évaluation
- Chavez LopezDocument12 pagesChavez LopezChristian ChavezPas encore d'évaluation
- Guia Lab Ejercicios 03 RespDocument7 pagesGuia Lab Ejercicios 03 RespAriel Cristobal Gallardo ContrerasPas encore d'évaluation
- Documents - MX - Ejercicios Mfi Entrega Unidad VDocument27 pagesDocuments - MX - Ejercicios Mfi Entrega Unidad VPedro Segundo CruzPas encore d'évaluation
- Diseño de AcueductoDocument6 pagesDiseño de AcueductowagnerabadPas encore d'évaluation
- Apuntes MCUDocument4 pagesApuntes MCULuis Drn AngrtPas encore d'évaluation
- 3.diseño de Rejilla y Desarenador Grupo 10 - CelesteDocument8 pages3.diseño de Rejilla y Desarenador Grupo 10 - CelesteJose Miguel Valencia BallesterosPas encore d'évaluation
- Ejercicio 3: Solución: para La Translación Del MóvilDocument9 pagesEjercicio 3: Solución: para La Translación Del MóvilShow EpicGamerPas encore d'évaluation
- I Examen Física IDocument12 pagesI Examen Física ILuis Fernando RojasPas encore d'évaluation
- Tratamiento SecundarioDocument7 pagesTratamiento SecundarioCarolina Panchana TPas encore d'évaluation
- Guía GEOMETRÍA G10Document6 pagesGuía GEOMETRÍA G10guata2603gmailcomPas encore d'évaluation
- Ejercicios Movimiento Armonico SimpleDocument3 pagesEjercicios Movimiento Armonico SimpleNICOLAS PLAZASPas encore d'évaluation
- Calculo Diafragmas PUENTE PDFDocument9 pagesCalculo Diafragmas PUENTE PDFRaul Bedoya HerediaPas encore d'évaluation
- RejillasDocument17 pagesRejillaseddy riveraPas encore d'évaluation
- Sector CircularDocument13 pagesSector CircularHugo Campana LeonPas encore d'évaluation
- Solución Taller de Hidráulica 1 CompletoDocument39 pagesSolución Taller de Hidráulica 1 CompletoLuis OrtizPas encore d'évaluation
- Problemas Dinamica de Cuerpo SolidoDocument5 pagesProblemas Dinamica de Cuerpo SolidoLuis Perez MarquezPas encore d'évaluation
- Velocidad de Giro de Una Estrella de NeutronesDocument2 pagesVelocidad de Giro de Una Estrella de NeutronesJose Leonardo Vega OchoaPas encore d'évaluation
- Diseño HidráulicoDocument9 pagesDiseño HidráulicoPedro Luna FeriaPas encore d'évaluation
- Calculo de Una Transport Ad or A Con Tornillo Sin FinDocument9 pagesCalculo de Una Transport Ad or A Con Tornillo Sin FinJavier Montecinos Delgadillo100% (2)
- Trabajo de PtapDocument11 pagesTrabajo de PtapJean paul Ortiz mezaPas encore d'évaluation
- Reyes Alfonso Jhanet PilarDocument5 pagesReyes Alfonso Jhanet Pilarjhanet reyesPas encore d'évaluation
- TRIGONOMETRIADocument5 pagesTRIGONOMETRIADaniel GamerPas encore d'évaluation
- Barraje y BocalDocument11 pagesBarraje y BocalWilmerCamposBarbozaPas encore d'évaluation
- Ejercicio 1Document6 pagesEjercicio 1Diego PlasenciaPas encore d'évaluation
- Cálculos de Los Parámetros de Diseño Obtenidos Mediante InvestigacionesDocument8 pagesCálculos de Los Parámetros de Diseño Obtenidos Mediante InvestigacioneswilliamPas encore d'évaluation
- Unidad 1 Vectores y Cinemática: 1.4. Movimiento en 2DDocument7 pagesUnidad 1 Vectores y Cinemática: 1.4. Movimiento en 2Dlxbx wxbPas encore d'évaluation
- Trigo2 TerceroDocument4 pagesTrigo2 Tercerofernandito18030% (1)
- 10 Fisica Gerardo Ug10Document4 pages10 Fisica Gerardo Ug10Wilhelm PatarroyoPas encore d'évaluation
- Momento de InerciaDocument7 pagesMomento de InerciaLEANDRO ORTIZ TABARESPas encore d'évaluation
- Movimiento Circular UniformeDocument4 pagesMovimiento Circular UniformeJulio Angel OtazoPas encore d'évaluation
- Diseño y Calculo de Alcantarilla Tipo Circular-Camino VecinalDocument2 pagesDiseño y Calculo de Alcantarilla Tipo Circular-Camino VecinalKaren Johana Bocanegra AguilarPas encore d'évaluation
- Fluido Dinámico de Una Turbina Hidráulica PeltonDocument18 pagesFluido Dinámico de Una Turbina Hidráulica PeltonBrandon Luis Correa MoralesPas encore d'évaluation
- Ayudantia Mov CircularDocument4 pagesAyudantia Mov CircularSebastian lorca laraPas encore d'évaluation
- GuiaaaDocument81 pagesGuiaaaalex quilichePas encore d'évaluation
- Problema de AplicaciónDocument83 pagesProblema de AplicaciónNathaly FonsecaPas encore d'évaluation
- Puente Losa AlveoladaDocument31 pagesPuente Losa AlveoladaTEOFILO ALIZARES GONZALES0% (1)
- Calcular Un Electroimán para Levantar Un Peso de 2kg de Hierro MacizoDocument2 pagesCalcular Un Electroimán para Levantar Un Peso de 2kg de Hierro MacizoAdonis CujiPas encore d'évaluation
- Calcular La Potencia Del Equipo de Bombeo: EjemploDocument11 pagesCalcular La Potencia Del Equipo de Bombeo: EjemploAndrea Caro CocaPas encore d'évaluation
- Diseno de Canales HerraduraDocument11 pagesDiseno de Canales HerraduraJean SparrowPas encore d'évaluation
- Acontecimientos Que Condujeron Al Ataque A Pearl HarborDocument19 pagesAcontecimientos Que Condujeron Al Ataque A Pearl HarborAndersoOnTALaParaPas encore d'évaluation
- Arenas SanpedroDocument20 pagesArenas SanpedroAndersoOnTALaParaPas encore d'évaluation
- SKF Vida - Util - de - Los - RodamientosDocument43 pagesSKF Vida - Util - de - Los - RodamientosManuel_Garcia100% (2)
- EstocolmoDocument9 pagesEstocolmoAndersoOnTALaParaPas encore d'évaluation
- Alineamiento de Equipos ROTATIVOSDocument28 pagesAlineamiento de Equipos ROTATIVOSGustavo Adolfo Luyo Vega86% (7)
- ArrobaDocument5 pagesArrobaAndersoOnTALaParaPas encore d'évaluation
- 9-Ajustes y Juegos Internos de RodamientosDocument14 pages9-Ajustes y Juegos Internos de RodamientosleoscazPas encore d'évaluation
- 9-Ajustes y Juegos Internos de RodamientosDocument14 pages9-Ajustes y Juegos Internos de RodamientosleoscazPas encore d'évaluation
- Tecsup Gestion Del MantenimientoDocument222 pagesTecsup Gestion Del Mantenimientorichard100% (12)
- Manualderodamientosparte2 140304191634 Phpapp02Document19 pagesManualderodamientosparte2 140304191634 Phpapp02AndersoOnTALaParaPas encore d'évaluation
- U Chile-Definición Plan Mantenimiento Óptimo para Equipos Críticos de Una Planta de LaminaciónDocument134 pagesU Chile-Definición Plan Mantenimiento Óptimo para Equipos Críticos de Una Planta de LaminaciónfdomolPas encore d'évaluation
- Tecsup Gestion Del MantenimientoDocument222 pagesTecsup Gestion Del Mantenimientorichard100% (12)
- 2 Seleccion de EstrategiaDocument11 pages2 Seleccion de EstrategiaChristopher Vera Cobba67% (3)
- Catalogo de GraserasDocument6 pagesCatalogo de GraserasAlejandro Sanchez0% (1)
- Tablas7 10Document5 pagesTablas7 10DennisQuispilayaChancaPas encore d'évaluation
- InformeGestionPresidenciaCAMT (2009 2010)Document28 pagesInformeGestionPresidenciaCAMT (2009 2010)jhoanmujPas encore d'évaluation
- Codigo de Colores - NTP 900 058 2005Document4 pagesCodigo de Colores - NTP 900 058 2005AndersoOnTALaParaPas encore d'évaluation
- Redes Industriales (Mecatrónica) PDFDocument38 pagesRedes Industriales (Mecatrónica) PDFAndersoOnTALaPara100% (1)
- Paneton Costo SÑR ManuelDocument3 pagesPaneton Costo SÑR ManuelAndersoOnTALaParaPas encore d'évaluation
- Paneton Costo SÑR ManuelDocument3 pagesPaneton Costo SÑR ManuelAndersoOnTALaParaPas encore d'évaluation
- Soportes para Trabajo Pesado (Plummer Blocks) PDFDocument14 pagesSoportes para Trabajo Pesado (Plummer Blocks) PDFAndersoOnTALaParaPas encore d'évaluation
- Paneton Costo SÑR ManuelDocument3 pagesPaneton Costo SÑR ManuelAndersoOnTALaParaPas encore d'évaluation
- 3Document26 pages3AndersoOnTALaParaPas encore d'évaluation
- Unidad Iv La Motivación LaboralDocument30 pagesUnidad Iv La Motivación LaboralAndersoOnTALaParaPas encore d'évaluation
- Cuadro Sinoptico Gestion StockDocument3 pagesCuadro Sinoptico Gestion Stockharold cardenasPas encore d'évaluation
- Bioética VIH-SIDADocument13 pagesBioética VIH-SIDAlingushilloPas encore d'évaluation
- ACTIVIDAD 1 PideologiaDocument4 pagesACTIVIDAD 1 Pideologiaangelica bernalPas encore d'évaluation
- Material de Estudio - KINESIOLOGIA PACIENTES ONCOLOGICOSDocument60 pagesMaterial de Estudio - KINESIOLOGIA PACIENTES ONCOLOGICOSNicol Sandoval Soto100% (1)
- MV2 Plan de Mantenimiento de Infraestructura y EquipamientoDocument10 pagesMV2 Plan de Mantenimiento de Infraestructura y Equipamientojosecarlos.linaresPas encore d'évaluation
- Pat. Kinderman 2010Document229 pagesPat. Kinderman 2010Joel Palomares100% (2)
- Examen Fisico General. Portafolios Guia 6Document8 pagesExamen Fisico General. Portafolios Guia 6kenneth bellorinPas encore d'évaluation
- Modelo de Plan de Clase 6Document5 pagesModelo de Plan de Clase 6Kecrik Ernandes ChenPas encore d'évaluation
- Formato de Inspeccion de EslingasDocument6 pagesFormato de Inspeccion de Eslingasronald niño0% (1)
- Hoja Datos y Seguridad Quimico W200 - ES 2015Document11 pagesHoja Datos y Seguridad Quimico W200 - ES 2015Alejandra Lorena Rojas GarzónPas encore d'évaluation
- Plantilla de Cuadro Comparativo en Word 11Document6 pagesPlantilla de Cuadro Comparativo en Word 11Leo FigueroaPas encore d'évaluation
- Estudio de Riesgos AyacuchoDocument184 pagesEstudio de Riesgos AyacuchoJose Carlos Risco MendozaPas encore d'évaluation
- Beneficios y Usos Que Le Puedes Dar A La Ceniza de MaderaDocument6 pagesBeneficios y Usos Que Le Puedes Dar A La Ceniza de MaderatujefejuanPas encore d'évaluation
- Manual de Practicas de Laboratorio Del Sistema Nervioso Q1-2015Document65 pagesManual de Practicas de Laboratorio Del Sistema Nervioso Q1-2015RogelioEucedaPas encore d'évaluation
- Guía de Nivelación Biología y Física Grado OnceDocument1 pageGuía de Nivelación Biología y Física Grado OnceJuan Carlos Velásquez MuñozPas encore d'évaluation
- Guion LiterarioDocument2 pagesGuion LiterarioAracelis PaoliniPas encore d'évaluation
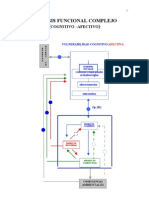
- Walter Riso - Análisis Funcional ComplejoDocument8 pagesWalter Riso - Análisis Funcional ComplejoSamantha Rojas GuzmanPas encore d'évaluation
- 7f4 Anexo I Caracteristicas Tecnica Filtro RotatorioDocument5 pages7f4 Anexo I Caracteristicas Tecnica Filtro RotatorioVictor AntonPas encore d'évaluation
- Gonzales Ruiz 2015Document13 pagesGonzales Ruiz 2015JesUs ChiQuez VenTuroPas encore d'évaluation
- Plan Plurianual de InversionesDocument38 pagesPlan Plurianual de InversionesJose Joaquin Ocampo PerezPas encore d'évaluation
- Ficha Graciela Tustanoski Figuras Del Goce UnoDocument15 pagesFicha Graciela Tustanoski Figuras Del Goce UnoMaria CassinaPas encore d'évaluation
- Propiedades Psicometricas Del Cuestionario de Agresividad Premeditada e Impulsiva en Adolescentes de Secundaria de MocheDocument55 pagesPropiedades Psicometricas Del Cuestionario de Agresividad Premeditada e Impulsiva en Adolescentes de Secundaria de MocheMartínng100% (1)
- Acta 03 de 2009 Sobre SaboresDocument5 pagesActa 03 de 2009 Sobre SaborescmgabrieladezPas encore d'évaluation
- Tamariz Angeles Carmen Del RosarioDocument2 pagesTamariz Angeles Carmen Del RosarioJose AntonioPas encore d'évaluation
- 7 - Medición de Temperatura (Pirometros) .Document5 pages7 - Medición de Temperatura (Pirometros) .Leonel SittnerPas encore d'évaluation
- Libro Secreto de Juan-Cristo-1 PDFDocument24 pagesLibro Secreto de Juan-Cristo-1 PDFpurrus100% (1)
- Tipos de Apósitos y CaracterísticasDocument9 pagesTipos de Apósitos y CaracterísticasJuan Wladimir Araya Leon100% (3)
- Densidad Volumetrica Teorica y LinealDocument7 pagesDensidad Volumetrica Teorica y LinealLuis SolanoPas encore d'évaluation
- Autoevaluacion Acreditacion SUA Bajo - 5095 PDFDocument20 pagesAutoevaluacion Acreditacion SUA Bajo - 5095 PDFAngela Maria Ortiz UribePas encore d'évaluation