Vous aimerez peut-être aussi
- Artificial Intelligence Questions&Ans Uninformed SearchDocument5 pagesArtificial Intelligence Questions&Ans Uninformed Searchjaijohnk83% (6)
- Phase Shifting TransformersDocument9 pagesPhase Shifting TransformersAnonymous 7vSl1eAsEL100% (1)
- T60 741x AE1Document694 pagesT60 741x AE1kumarinelPas encore d'évaluation
- Acidizing TreatmentsDocument93 pagesAcidizing TreatmentsPeña Lucia100% (2)
- Transformer 161127050149 PDFDocument16 pagesTransformer 161127050149 PDFemg100% (1)
- Auto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenD'EverandAuto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenÉvaluation : 4 sur 5 étoiles4/5 (2)
- SVC Applications: Increase in Steady-State Power-Transfer CapacityDocument21 pagesSVC Applications: Increase in Steady-State Power-Transfer CapacityChetan KotwalPas encore d'évaluation
- Final Report Transformer Design Section A PDFDocument68 pagesFinal Report Transformer Design Section A PDFThabiso Kyle100% (1)
- Transformer Solved Examples of Basic Electrical Eng by Nagrath and KothariDocument4 pagesTransformer Solved Examples of Basic Electrical Eng by Nagrath and KothariAnurag ZwPas encore d'évaluation
- Chapter 4: Design Methodology of Power TransformerDocument34 pagesChapter 4: Design Methodology of Power TransformerWellington AzziPas encore d'évaluation
- Design Steps of TransformerDocument18 pagesDesign Steps of TransformerKeval ParmarPas encore d'évaluation
- Transformer Design AnalysisDocument6 pagesTransformer Design AnalysisAkash VermaPas encore d'évaluation
- Transformer Design ParametersDocument6 pagesTransformer Design ParametersPravat SatpathyPas encore d'évaluation
- Books RefrenceDocument13 pagesBooks RefrencePradith SaiPas encore d'évaluation
- Synopsis Proposal For 2021Document4 pagesSynopsis Proposal For 20212k18-EE-243 Vethushan VinnayagamoorththiPas encore d'évaluation
- 8MS Three-Phase Synchronous MotorsDocument163 pages8MS Three-Phase Synchronous MotorsrrrPas encore d'évaluation
- Design of TransformersDocument26 pagesDesign of TransformersSagun KatuwalPas encore d'évaluation
- Vector GroupDocument8 pagesVector GroupSuraj Kumar GuptaPas encore d'évaluation
- Aed Unit3Document68 pagesAed Unit3Anser Pasha100% (1)
- S2-4-SC Withstand Test of - EHV - Transformer - Learnings - Challenges-C Jayasenan-Siemens - Rev1Document8 pagesS2-4-SC Withstand Test of - EHV - Transformer - Learnings - Challenges-C Jayasenan-Siemens - Rev1MallikarjunPas encore d'évaluation
- Over Reach of Distance RelayDocument2 pagesOver Reach of Distance Relayimcoolmailme2Pas encore d'évaluation
- Design and Analysis of Transformer Using MATLABDocument6 pagesDesign and Analysis of Transformer Using MATLABIJSTEPas encore d'évaluation
- Article Dynamic Modeling of Three Phase TransformerDocument5 pagesArticle Dynamic Modeling of Three Phase Transformerrasim_m1146100% (1)
- Electromagnetic Relays - ManiDocument17 pagesElectromagnetic Relays - ManipraveenaprabhuPas encore d'évaluation
- VT Guard Pro - Technical ArticleDocument4 pagesVT Guard Pro - Technical ArticleAdemir DzanicPas encore d'évaluation
- A Presentation ON Overhead Line Insulators Faculty: Gunjan VarshneyDocument67 pagesA Presentation ON Overhead Line Insulators Faculty: Gunjan VarshneyGunjan VarshneyPas encore d'évaluation
- IEEMA-Basics of Dual Ratio TransformersDocument3 pagesIEEMA-Basics of Dual Ratio TransformersHari Krishna.MPas encore d'évaluation
- DESIGNDocument7 pagesDESIGNjaythakar8887Pas encore d'évaluation
- Spectra Engineering Brochure - TransformerDocument4 pagesSpectra Engineering Brochure - TransformerAkash VermaPas encore d'évaluation
- Impulse Voltage Calculation of TransformerDocument11 pagesImpulse Voltage Calculation of TransformerAnonymous sAmJfcV100% (1)
- Transformer DesignDocument26 pagesTransformer DesignVinay KumarPas encore d'évaluation
- 15 Transformer Voltage Control and Tap Changing: Booster Transformer Booster TransformerDocument9 pages15 Transformer Voltage Control and Tap Changing: Booster Transformer Booster TransformerFaizan 'Fezar' RabbaniPas encore d'évaluation
- unit-II TransformersDocument19 pagesunit-II Transformersc.naresh9727100% (1)
- Design of Single and Three Phase Transformer Using MATLABDocument6 pagesDesign of Single and Three Phase Transformer Using MATLABDevesh JayaswalPas encore d'évaluation
- Diagnosis of The Short Circuit Duty of Power TransformersDocument6 pagesDiagnosis of The Short Circuit Duty of Power TransformerscisnatelPas encore d'évaluation
- Manual FemmDocument161 pagesManual Femmthiagovt2Pas encore d'évaluation
- Electrical Design 3 Final Report (FEMM) PDFDocument34 pagesElectrical Design 3 Final Report (FEMM) PDFThabiso KylePas encore d'évaluation
- Design of 20 MVADocument130 pagesDesign of 20 MVAcisnatelPas encore d'évaluation
- Transformer Voltage RegulationDocument21 pagesTransformer Voltage RegulationAbdelilahaliPas encore d'évaluation
- (A) Design - Introduction To Transformer DesignDocument16 pages(A) Design - Introduction To Transformer DesignZineddine BENOUADAHPas encore d'évaluation
- TransformerDocument9 pagesTransformerSamPolancosPas encore d'évaluation
- Designing of Amorphous Core Distribution Transformer and Comparison With CRGO Core Distribution TransformerDocument5 pagesDesigning of Amorphous Core Distribution Transformer and Comparison With CRGO Core Distribution TransformerIJMERPas encore d'évaluation
- Power Systems Protection Course: Al-Balqa Applied UniversityDocument48 pagesPower Systems Protection Course: Al-Balqa Applied UniversityPIOS CHICKENPas encore d'évaluation
- 11.example Calculation - TransformerDocument16 pages11.example Calculation - Transformerrajpre1213Pas encore d'évaluation
- S2-6-Calculating Circulating Currents in Clamping Strucure and Preventing Gassing Problem - Manan Pandya-Siemens - Rev1Document3 pagesS2-6-Calculating Circulating Currents in Clamping Strucure and Preventing Gassing Problem - Manan Pandya-Siemens - Rev1MallikarjunPas encore d'évaluation
- Unit IVDocument75 pagesUnit IVJanapareddy Veerendra KumarPas encore d'évaluation
- P10Document16 pagesP10Lynskey1973100% (1)
- User's Manual VLN PDFDocument129 pagesUser's Manual VLN PDFAkash VermaPas encore d'évaluation
- Transformer Design NotesDocument15 pagesTransformer Design Notesrishabh100% (2)
- 24 66 11 KV 5 MVA Transformer With Amendment PDFDocument100 pages24 66 11 KV 5 MVA Transformer With Amendment PDFNirmal mehtaPas encore d'évaluation
- L Umanad Powertrans DesignDocument48 pagesL Umanad Powertrans Designdeshraj100% (2)
- Analysis and Design of Power Electronic Transformer For Medium Voltage LevelsDocument5 pagesAnalysis and Design of Power Electronic Transformer For Medium Voltage LevelsSobia SaadiaPas encore d'évaluation
- Lecture 11 Electrification of Commercial InstallationDocument7 pagesLecture 11 Electrification of Commercial InstallationBUKENYA BEEE-2026Pas encore d'évaluation
- Synchronous Machine DesignDocument35 pagesSynchronous Machine DesignvietnhuPas encore d'évaluation
- 2 ACTS12kPLUSDocument34 pages2 ACTS12kPLUSPRBPas encore d'évaluation
- Electrical SteelDocument193 pagesElectrical SteelpavanupadhyePas encore d'évaluation
- Problems in Overall Differential Protection of Generator and GTDocument4 pagesProblems in Overall Differential Protection of Generator and GTsirsa11100% (1)
- Thyristor Ratings and Protection PDFDocument4 pagesThyristor Ratings and Protection PDFAmit ParchakePas encore d'évaluation
- Transformer Design Project Final 1 - 3Document19 pagesTransformer Design Project Final 1 - 3Ashe MathewPas encore d'évaluation
- 3ph Transformer - Short Circuit TestDocument7 pages3ph Transformer - Short Circuit TestlpestanaPas encore d'évaluation
- Home,: A Solace To Which A Journey Is Never Too Long..Document25 pagesHome,: A Solace To Which A Journey Is Never Too Long..Duvonto RealtyPas encore d'évaluation
- 4-3 Deflection Due To Bending: 164 Mechanical Engineering DesignDocument10 pages4-3 Deflection Due To Bending: 164 Mechanical Engineering DesignSamawat AhsanPas encore d'évaluation
- Home Automation Control System Using DTMFDocument25 pagesHome Automation Control System Using DTMFengaydiPas encore d'évaluation
- A Research Paper On Design and Analysis of Shaftless Steam TurbineDocument5 pagesA Research Paper On Design and Analysis of Shaftless Steam TurbineEditor IJTSRDPas encore d'évaluation
- ARSTRUCTS Chapter1Document15 pagesARSTRUCTS Chapter1Aila MaePas encore d'évaluation
- EST 2011B v1.0 Configuration 10/28/2018 7:43 AMDocument2 pagesEST 2011B v1.0 Configuration 10/28/2018 7:43 AMbagusPas encore d'évaluation
- Mapplet InformaticaDocument3 pagesMapplet InformaticaRamesh Babu BabuPas encore d'évaluation
- Combustion System Repairs - Industrial Gas Turbines: Industrial Frame Engines - GE, Siemens, Alstom - Including "F" ClassDocument2 pagesCombustion System Repairs - Industrial Gas Turbines: Industrial Frame Engines - GE, Siemens, Alstom - Including "F" ClassfrdnPas encore d'évaluation
- Banda Hoja de DatosDocument1 pageBanda Hoja de DatosSergio Guevara MenaPas encore d'évaluation
- SYNC2000 - 4.00.022014 Protocol ConverterDocument2 pagesSYNC2000 - 4.00.022014 Protocol ConverterAnasSalemPas encore d'évaluation
- Millikan Oil Drop ExperimentDocument6 pagesMillikan Oil Drop ExperimentruleevanPas encore d'évaluation
- Software Hardware ListDocument2 pagesSoftware Hardware ListjackPas encore d'évaluation
- Introduccion To PhysicsDocument475 pagesIntroduccion To PhysicsLyvsPas encore d'évaluation
- Confined Space Entry Permit ACC JamulDocument1 pageConfined Space Entry Permit ACC JamulathulpcucekPas encore d'évaluation
- Update Notifikasi Depkes FEB 18Document6 pagesUpdate Notifikasi Depkes FEB 18pratistanadia_912023Pas encore d'évaluation
- US Hex Bolt SizesDocument2 pagesUS Hex Bolt SizesYana Jarang OlPas encore d'évaluation
- A Study On The Design Optimization of An AUV by Using Computational Fluid Dynamic AnalysisDocument7 pagesA Study On The Design Optimization of An AUV by Using Computational Fluid Dynamic AnalysisSalma SherbazPas encore d'évaluation
- HP40 NBDocument13 pagesHP40 NBTarun ChandraPas encore d'évaluation
- NCERT Class 7 Geography WaterDocument9 pagesNCERT Class 7 Geography Waterbalamurali_aPas encore d'évaluation
- RAB PE20Tx1set Amo, 60HP (1) Cetakan 50kg (400 Balok 16 Can) + Ice Storage 50TDocument3 pagesRAB PE20Tx1set Amo, 60HP (1) Cetakan 50kg (400 Balok 16 Can) + Ice Storage 50THidayat SyamsiPas encore d'évaluation
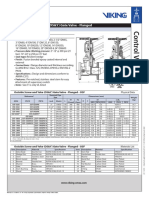
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDocument2 pagesOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoPas encore d'évaluation
- AE Yanmar 6GL UTDocument151 pagesAE Yanmar 6GL UTMehdi Es-SafiPas encore d'évaluation
- Chapter 6 PDFDocument59 pagesChapter 6 PDFSyarif HidayatPas encore d'évaluation
- Lesson1. TriangulationDocument21 pagesLesson1. TriangulationTristania Leighan DeypuyartPas encore d'évaluation
- Project Management Quick Reference GuideDocument5 pagesProject Management Quick Reference GuidejcpolicarpiPas encore d'évaluation
- Mole Reactions and Stoichiometry MultipleDocument25 pagesMole Reactions and Stoichiometry MultiplelinaPas encore d'évaluation
- Presented By:: Rafi Sheikh Sheeraz Malik Syed Ahmed Ali Umair Ali Waqar AmeenDocument34 pagesPresented By:: Rafi Sheikh Sheeraz Malik Syed Ahmed Ali Umair Ali Waqar AmeenSyed Ahmed AliPas encore d'évaluation
- CHCE 3004 CHEG 333 Chemical Reaction Engineering I QP 2020 SUPPLIMENTRY - AM PDFDocument2 pagesCHCE 3004 CHEG 333 Chemical Reaction Engineering I QP 2020 SUPPLIMENTRY - AM PDFLGK KlanPas encore d'évaluation