Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- 14 CFR Ch. I (1-1-10 Edition) 29.171: Cruise. Static Longitudinal StaDocument2 pages14 CFR Ch. I (1-1-10 Edition) 29.171: Cruise. Static Longitudinal StaV C AgnihotriPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- CFR 2017 Title50 Vol9 Sec29 154Document43 pagesCFR 2017 Title50 Vol9 Sec29 154V C AgnihotriPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- 14 CFR Ch. I (1-1-11 Edition) 29.181: Subpart C-Strength RequirementsDocument1 page14 CFR Ch. I (1-1-11 Edition) 29.181: Subpart C-Strength RequirementsV C AgnihotriPas encore d'évaluation
- Federal Aviation Administration, DOT 29.143: 29.141 GeneralDocument2 pagesFederal Aviation Administration, DOT 29.143: 29.141 GeneralV C AgnihotriPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Current 50cfr622 Regulations PDFDocument356 pagesCurrent 50cfr622 Regulations PDFV C AgnihotriPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- CFR 2011 Title14 Vol1 Sec29 173Document1 pageCFR 2011 Title14 Vol1 Sec29 173V C AgnihotriPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- CFR 2002 Title14 Vol1 Sec29 151Document1 pageCFR 2002 Title14 Vol1 Sec29 151V C AgnihotriPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- 49 CFR Subtitle A (10-1-04 Edition) 28.161-28.169: 28.161-28.169 (Reserved) 28.170 Compliance ProceduresDocument2 pages49 CFR Subtitle A (10-1-04 Edition) 28.161-28.169: 28.161-28.169 (Reserved) 28.170 Compliance ProceduresV C AgnihotriPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- 50 CFR Ch. I (10-1-17 Edition) 29.142: Inancial SsuranceDocument1 page50 CFR Ch. I (10-1-17 Edition) 29.142: Inancial SsuranceV C AgnihotriPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- 7 CFR Ch. I (1-1-12 Edition) 29.131: 29.131 (Reserved) 29.132 Division InvestigationsDocument1 page7 CFR Ch. I (1-1-12 Edition) 29.131: 29.131 (Reserved) 29.132 Division InvestigationsV C AgnihotriPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Agricultural Marketing Service, USDA 29.129: Provided, That When A MaterialDocument2 pagesAgricultural Marketing Service, USDA 29.129: Provided, That When A MaterialV C AgnihotriPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Agricultural Marketing Service, USDA 29.132: WWW - Fdsys.govDocument1 pageAgricultural Marketing Service, USDA 29.132: WWW - Fdsys.govV C AgnihotriPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- 50 CFR Ch. I (10-1-17 Edition) 29.142: Inancial SsuranceDocument2 pages50 CFR Ch. I (10-1-17 Edition) 29.142: Inancial SsuranceV C AgnihotriPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- 7 CFR Ch. I (1-1-10 Edition) 29.133: 29.133 Identification NumberDocument1 page7 CFR Ch. I (1-1-10 Edition) 29.133: 29.133 Identification NumberV C AgnihotriPas encore d'évaluation
- 50 CFR Ch. I (10-1-17 Edition) 29.119Document2 pages50 CFR Ch. I (10-1-17 Edition) 29.119V C AgnihotriPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- 7 CFR Ch. I (1-1-13 Edition) 29.124: Provided, That When A MaterialDocument1 page7 CFR Ch. I (1-1-13 Edition) 29.124: Provided, That When A MaterialV C AgnihotriPas encore d'évaluation
- 7 CFR Ch. I (1-1-11 Edition) 29.123: Export Permissive Inspection and Certification. The Inspection and CertifiDocument1 page7 CFR Ch. I (1-1-11 Edition) 29.123: Export Permissive Inspection and Certification. The Inspection and CertifiV C AgnihotriPas encore d'évaluation
- 7 CFR Ch. I (1-1-12 Edition) 29.67: 29.71 Mandatory InspectionDocument1 page7 CFR Ch. I (1-1-12 Edition) 29.67: 29.71 Mandatory InspectionV C AgnihotriPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- CFR 2017 Title50 Vol9 Sec29 118Document1 pageCFR 2017 Title50 Vol9 Sec29 118V C AgnihotriPas encore d'évaluation
- 7 CFR Ch. I (1-1-18 Edition) 29.93Document1 page7 CFR Ch. I (1-1-18 Edition) 29.93V C AgnihotriPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- 50 CFR Ch. I (10-1-17 Edition) 29.112: 29.113 What Hydrologic Standards Must I Meet?Document2 pages50 CFR Ch. I (10-1-17 Edition) 29.112: 29.113 What Hydrologic Standards Must I Meet?V C AgnihotriPas encore d'évaluation
- 7 CFR Ch. I (1-1-02 Edition) 29.127: (46 FR 62394, Dec. 24, 1981)Document2 pages7 CFR Ch. I (1-1-02 Edition) 29.127: (46 FR 62394, Dec. 24, 1981)V C AgnihotriPas encore d'évaluation
- 7 CFR Ch. I (1-1-98 Edition) 29.109: 29.113 Suspension and TerminationDocument1 page7 CFR Ch. I (1-1-98 Edition) 29.109: 29.113 Suspension and TerminationV C AgnihotriPas encore d'évaluation
- CFR 1999 Title49 Vol1 Sec29 115Document2 pagesCFR 1999 Title49 Vol1 Sec29 115V C AgnihotriPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Agricultural Marketing Service, USDA 29.113: Inspectors Samplers and WeighersDocument1 pageAgricultural Marketing Service, USDA 29.113: Inspectors Samplers and WeighersV C AgnihotriPas encore d'évaluation
- 49 CFR Subtitle A (10-1-99 Edition) 29.110: 29.110 CoverageDocument2 pages49 CFR Subtitle A (10-1-99 Edition) 29.110: 29.110 CoverageV C AgnihotriPas encore d'évaluation
- 50 CFR Ch. I (10-1-17 Edition) 29.61Document1 page50 CFR Ch. I (10-1-17 Edition) 29.61V C AgnihotriPas encore d'évaluation
- Internal Revenue Service, Treasury 521.112: 521.109 Real Property Income, Nat-Ural Resource RoyaltiesDocument2 pagesInternal Revenue Service, Treasury 521.112: 521.109 Real Property Income, Nat-Ural Resource RoyaltiesV C AgnihotriPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- 7 CFR Ch. I (1-1-12 Edition) 29.111: 29.111 Weight DeterminationsDocument3 pages7 CFR Ch. I (1-1-12 Edition) 29.111: 29.111 Weight DeterminationsV C AgnihotriPas encore d'évaluation
- CFR 1998 Title7 Vol2 Part29 SubpartB Subjectgroup Id366Document2 pagesCFR 1998 Title7 Vol2 Part29 SubpartB Subjectgroup Id366V C AgnihotriPas encore d'évaluation
- Lecture 1 Gas Dynamics PDFDocument16 pagesLecture 1 Gas Dynamics PDFKarim MagdyPas encore d'évaluation
- Supplement Airfoil MakerDocument14 pagesSupplement Airfoil MakerCharlton EddiePas encore d'évaluation
- C172 SOP June 2020Document13 pagesC172 SOP June 2020Peter Hoole-jacksonPas encore d'évaluation
- Assignment For Boundary Layer PDFDocument7 pagesAssignment For Boundary Layer PDFshailesh patelPas encore d'évaluation
- Module 17Document117 pagesModule 17Cool ClipsPas encore d'évaluation
- Connection Drawing As Built AnenometerDocument1 pageConnection Drawing As Built AnenometerDhammika AbeysinghaPas encore d'évaluation
- Steinegger Fuel Economy As A Function of Weight and Distance v1-1Document11 pagesSteinegger Fuel Economy As A Function of Weight and Distance v1-1VodanhNguoiPas encore d'évaluation
- Airfoils Lift and Drag Forces Acting On A Wing Section: Equal Amounts of Thickness Is Added To Camber InaDocument4 pagesAirfoils Lift and Drag Forces Acting On A Wing Section: Equal Amounts of Thickness Is Added To Camber InaMat HarzickPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Sailplane Wing OptimizationDocument21 pagesSailplane Wing OptimizationConstantin CrispyPas encore d'évaluation
- DragDocument40 pagesDragchhetribharat08Pas encore d'évaluation
- Lunch and Learn: OCTOBER 13, 2021Document37 pagesLunch and Learn: OCTOBER 13, 2021Joe AndrewsPas encore d'évaluation
- Naca 4412Document3 pagesNaca 4412Selva KumarPas encore d'évaluation
- REPORT 1273: A Study of The Zero-Lhw Drag-Rise Characteristics of Wing-Body Combinations Near The Speed of SoundDocument22 pagesREPORT 1273: A Study of The Zero-Lhw Drag-Rise Characteristics of Wing-Body Combinations Near The Speed of Soundroyb_84Pas encore d'évaluation
- Naca 0015 JavafoilDocument1 pageNaca 0015 JavafoilDeny Bayu SaefudinPas encore d'évaluation
- 88489main H-2149Document42 pages88489main H-2149sohelrulePas encore d'évaluation
- Aeroelasticity ThesisDocument5 pagesAeroelasticity Thesisb0sus1hyjaf2100% (1)
- Flight I: Structure & Function of WingsDocument11 pagesFlight I: Structure & Function of WingsPurnima SarenPas encore d'évaluation
- Aerospace Sensors by Alexander V. NebylovDocument378 pagesAerospace Sensors by Alexander V. NebylovBWPas encore d'évaluation
- 6.05 Lift and DragDocument29 pages6.05 Lift and DragthiruvenkiPas encore d'évaluation
- A Numerical Method For The Design and Analysis of Counter Rotating PropellorsDocument8 pagesA Numerical Method For The Design and Analysis of Counter Rotating PropellorsmarkPas encore d'évaluation
- Shell Eco Marathon 2021 Its Team Sapuangin Simulate To InnovateDocument18 pagesShell Eco Marathon 2021 Its Team Sapuangin Simulate To InnovateRudy ArthaPas encore d'évaluation
- Aero Syllabus 7Document5 pagesAero Syllabus 7ae00505Pas encore d'évaluation
- Performance - Class A (AE Materials) ClimbDocument14 pagesPerformance - Class A (AE Materials) ClimbafdsfagadgPas encore d'évaluation
- Sree Chitra Thirunal College of Engineering Compressible Fluid Flow (M7) Second Series Test December 2020Document2 pagesSree Chitra Thirunal College of Engineering Compressible Fluid Flow (M7) Second Series Test December 2020Arjun LalitPas encore d'évaluation
- Size Effect of Wind Turbine BladesDocument7 pagesSize Effect of Wind Turbine BladesMehrdad BorPas encore d'évaluation
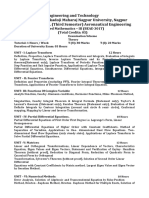
- Engineering and Technology Rashtrasant Tukadoji Maharaj Nagpur University, Nagpur Syllabus For B.E. (Third Semester) Aeronautical EngineeringDocument85 pagesEngineering and Technology Rashtrasant Tukadoji Maharaj Nagpur University, Nagpur Syllabus For B.E. (Third Semester) Aeronautical Engineeringprabhat ranjan mishraPas encore d'évaluation
- Design of H Tail UavDocument26 pagesDesign of H Tail Uavrohith-161937100% (1)
- Onera S1maDocument29 pagesOnera S1maSindbad SailorPas encore d'évaluation
- Electric Motor Control: DC, AC, and BLDC MotorsD'EverandElectric Motor Control: DC, AC, and BLDC MotorsÉvaluation : 4.5 sur 5 étoiles4.5/5 (19)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialD'EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialPas encore d'évaluation
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterD'EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterPas encore d'évaluation
- Essential Guide to Workplace Investigations, The: A Step-By-Step Guide to Handling Employee Complaints & ProblemsD'EverandEssential Guide to Workplace Investigations, The: A Step-By-Step Guide to Handling Employee Complaints & ProblemsÉvaluation : 3 sur 5 étoiles3/5 (2)
- Electric Motors and Drives: Fundamentals, Types and ApplicationsD'EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsD'EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)