Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Geological MapsDocument209 pagesGeological Mapssaul saul100% (3)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- C Sharp ProgrammingDocument226 pagesC Sharp Programmingnegin17h100% (9)
- Extended Mars Theory (High Resolution)Document98 pagesExtended Mars Theory (High Resolution)Péter GállPas encore d'évaluation
- Emotional IntelligenceDocument7 pagesEmotional IntelligenceGeorge Brown KalibuPas encore d'évaluation
- Fantasy WorldBuilder GuideDocument36 pagesFantasy WorldBuilder GuideDevananda100% (2)
- A3 Toyota 8 Step TemplatesDocument11 pagesA3 Toyota 8 Step TemplatesBharathPas encore d'évaluation
- Stages of Second Language AcquisitionDocument2 pagesStages of Second Language AcquisitionmohammedPas encore d'évaluation
- Architectural StudiesDocument41 pagesArchitectural Studiesshazwan_88Pas encore d'évaluation
- A 3 TemplateDocument16 pagesA 3 TemplatemohammedPas encore d'évaluation
- Philippine Coastal Management Guidebook Series No. 3Document112 pagesPhilippine Coastal Management Guidebook Series No. 3CarlPas encore d'évaluation
- Indian Ocean TradeDocument19 pagesIndian Ocean Tradeapi-296326751Pas encore d'évaluation
- Princes Channel Wreck - Phase IIIDocument77 pagesPrinces Channel Wreck - Phase IIIWessex ArchaeologyPas encore d'évaluation
- Cause and Effect Analysis (Fishbone Diagrams) - From MindTools - Com2 PDFDocument7 pagesCause and Effect Analysis (Fishbone Diagrams) - From MindTools - Com2 PDFmohammedPas encore d'évaluation
- English Trauma PDFDocument4 pagesEnglish Trauma PDFCarlosPas encore d'évaluation
- Stages of English SpeakingDocument8 pagesStages of English SpeakingmohammedPas encore d'évaluation
- 4597 4870 1 PB PDFDocument6 pages4597 4870 1 PB PDFmohammedPas encore d'évaluation
- Learning English Online: Making A PlanDocument11 pagesLearning English Online: Making A PlanmohammedPas encore d'évaluation
- Yao2019 Article TheRealizationAndEvaluationOfMDocument13 pagesYao2019 Article TheRealizationAndEvaluationOfMmohammedPas encore d'évaluation
- Civil 222 Mid500Document20 pagesCivil 222 Mid500mohammedPas encore d'évaluation
- The Suite Born To BuildDocument2 pagesThe Suite Born To BuildmohammedPas encore d'évaluation
- Generating Classes1Document10 pagesGenerating Classes1mohammedPas encore d'évaluation
- POSSNSDocument2 pagesPOSSNSmohammedPas encore d'évaluation
- Laurichesse Ion Gnss 2015 September BDPDocument10 pagesLaurichesse Ion Gnss 2015 September BDPmohammedPas encore d'évaluation
- A Product By: Magicgnss PPP ReportDocument9 pagesA Product By: Magicgnss PPP ReportmohammedPas encore d'évaluation
- Innovation - Navigation From LEO - GPS World PDFDocument13 pagesInnovation - Navigation From LEO - GPS World PDFmohammedPas encore d'évaluation
- Precise Orbit Determination: Adrian Jäggi and Daniel ArnoldDocument47 pagesPrecise Orbit Determination: Adrian Jäggi and Daniel ArnoldmohammedPas encore d'évaluation
- Personal Information Collection Statement (PICS)Document2 pagesPersonal Information Collection Statement (PICS)mohammedPas encore d'évaluation
- A Product By: Magicgnss PPP ReportDocument9 pagesA Product By: Magicgnss PPP ReportmohammedPas encore d'évaluation
- Numerical Algorithms For Preci PDFDocument155 pagesNumerical Algorithms For Preci PDFmohammedPas encore d'évaluation
- Innovation - Navigation From LEO - GPS World PDFDocument13 pagesInnovation - Navigation From LEO - GPS World PDFmohammedPas encore d'évaluation
- The Multi-GNSS Experiment (MGEX) of The International GNSS Service (IGS) - Achievements, Prospects and ChallengesDocument27 pagesThe Multi-GNSS Experiment (MGEX) of The International GNSS Service (IGS) - Achievements, Prospects and ChallengesmohammedPas encore d'évaluation
- Research Grants Council: Hong Kong PHD Fellowship Scheme 2017/18 Explanatory Notes To ApplicantsDocument4 pagesResearch Grants Council: Hong Kong PHD Fellowship Scheme 2017/18 Explanatory Notes To ApplicantsTobi AkinyemiPas encore d'évaluation
- Photogrammetry ConceptDocument224 pagesPhotogrammetry ConceptMohamed El-zamanyPas encore d'évaluation
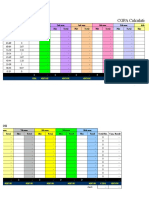
- CGPA Calculation: GPA #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0!Document2 pagesCGPA Calculation: GPA #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0!mohammedPas encore d'évaluation
- Grants DeclarationDocument3 pagesGrants DeclarationmohammedPas encore d'évaluation
- Endorsement LetterDocument1 pageEndorsement LettermohammedPas encore d'évaluation
- PTR 2Document31 pagesPTR 2Killer KnightPas encore d'évaluation
- Aruba enDocument15 pagesAruba enArco PrimPas encore d'évaluation
- The Universal Grid System: Coordsys@nga - MilDocument8 pagesThe Universal Grid System: Coordsys@nga - Milaku selalu ada untukmuPas encore d'évaluation
- (Journal of South Asian Languages and Linguistics) Retroflexion in South Asia Typological Genetic and Areal PatternsDocument53 pages(Journal of South Asian Languages and Linguistics) Retroflexion in South Asia Typological Genetic and Areal PatternsChetanPas encore d'évaluation
- Instructional PowerpointDocument23 pagesInstructional Powerpointapi-280377452Pas encore d'évaluation
- Sedimentation in LakeDocument7 pagesSedimentation in LakeWahyu SutrisnoPas encore d'évaluation
- CD112-Philippine Waters PDFDocument2 pagesCD112-Philippine Waters PDFKaren Clyde PamaPas encore d'évaluation
- Aquatic EcosystemDocument43 pagesAquatic EcosystemCarla KhyllPas encore d'évaluation
- IRSDocument18 pagesIRSNagalakshmi ThirunavukkarasuPas encore d'évaluation
- Vanadium DepositsDocument10 pagesVanadium DepositsAnonymous bcHKSCr100% (1)
- Thracian-Kings-As-Founders-Of-Hellenic-Apoikias-Astakos-Byzantion-And-Mesambria-Pontica - Content File PDFDocument3 pagesThracian-Kings-As-Founders-Of-Hellenic-Apoikias-Astakos-Byzantion-And-Mesambria-Pontica - Content File PDFanon_161636426Pas encore d'évaluation
- Changing Landforms BookDocument14 pagesChanging Landforms Bookapi-298672230Pas encore d'évaluation
- 10 Chapter 2 - Geo Physical Environment PDFDocument16 pages10 Chapter 2 - Geo Physical Environment PDFChrissaPas encore d'évaluation
- Devoy Brown - Lines of Latitude & Longitude Activity 3Document4 pagesDevoy Brown - Lines of Latitude & Longitude Activity 3Swayne BrownPas encore d'évaluation
- Grade 3 Peru Unit Test: Distinguished (D) Excellence (E) Proficient (P) Functional (F) Limited (L) Not Yet Achieved (NY)Document6 pagesGrade 3 Peru Unit Test: Distinguished (D) Excellence (E) Proficient (P) Functional (F) Limited (L) Not Yet Achieved (NY)api-297593984Pas encore d'évaluation
- Maths NotesDocument71 pagesMaths NotesSekar DineshPas encore d'évaluation
- TG 9780199064823 PDFDocument124 pagesTG 9780199064823 PDFhummaraPas encore d'évaluation
- Discover Reference ManualDocument462 pagesDiscover Reference ManualDjoeneyPas encore d'évaluation
- GeoMedia 2016 Product DescriptionDocument25 pagesGeoMedia 2016 Product DescriptionAnonymous zaBwWGb9hTPas encore d'évaluation
- Port ContactDocument410 pagesPort ContactSuryadilaga JajangPas encore d'évaluation
- Modern Historians About Ancient Epirus - Ethnicity of Ancient EpirotesDocument9 pagesModern Historians About Ancient Epirus - Ethnicity of Ancient EpirotesHistory-of-Macedonia.com100% (3)
- Lecture 4 - GIS SubsystemsDocument45 pagesLecture 4 - GIS SubsystemsJenal Jinggo83% (6)
- Abban EK Et Al 2004Document63 pagesAbban EK Et Al 2004james_bilcePas encore d'évaluation