Vous aimerez peut-être aussi
- Regular FalsiDocument11 pagesRegular FalsiHajra AamirPas encore d'évaluation
- Applications of Variational Inequalities in Stochastic ControlD'EverandApplications of Variational Inequalities in Stochastic ControlÉvaluation : 2 sur 5 étoiles2/5 (1)
- Dynamical Systems Method for Solving Nonlinear Operator EquationsD'EverandDynamical Systems Method for Solving Nonlinear Operator EquationsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Exercises3120 PDFDocument82 pagesExercises3120 PDFJames MaxwellPas encore d'évaluation
- Unit - 1 - Two Mark QuestionsDocument3 pagesUnit - 1 - Two Mark QuestionsRustEdPas encore d'évaluation
- Rate of ConvergenceDocument10 pagesRate of ConvergenceKhalid ShahPas encore d'évaluation
- DM AllDocument1 731 pagesDM Alllucy annPas encore d'évaluation
- CH 1 - IntroductionDocument41 pagesCH 1 - IntroductionArwa .H100% (1)
- Difference Between Partial Derivatives and Total DerivativesDocument15 pagesDifference Between Partial Derivatives and Total Derivativessugamsehgal100% (1)
- Bs-III Diff Geo Mcqs With AnsDocument5 pagesBs-III Diff Geo Mcqs With AnsFahad Khan100% (1)
- Coding Theory and Its ApplicationsDocument45 pagesCoding Theory and Its Applicationsnavisingla100% (1)
- Heat Equation in One - and Two-Dimensional Systems - Utkstair OrgDocument26 pagesHeat Equation in One - and Two-Dimensional Systems - Utkstair Orgar_frankPas encore d'évaluation
- Unit - IV: Numerical Solutions of Differential Equations (MCQ)Document5 pagesUnit - IV: Numerical Solutions of Differential Equations (MCQ)DeathSky GamingPas encore d'évaluation
- ACFrOgBuDfj 7u91QJfmv6DvkAhbPmlkl2i1DdpoTnFL0CVSDG7odLam3d1WK1Zp ZuGPd38NT2hMlV3 AGFTfTjwE64u5YQMuldsq0ICCdxfhyBZucNvs05yzO7pyTG7GbnvPnRKyCYH8s 8LDocument71 pagesACFrOgBuDfj 7u91QJfmv6DvkAhbPmlkl2i1DdpoTnFL0CVSDG7odLam3d1WK1Zp ZuGPd38NT2hMlV3 AGFTfTjwE64u5YQMuldsq0ICCdxfhyBZucNvs05yzO7pyTG7GbnvPnRKyCYH8s 8LPRAJWAL GOWDAPas encore d'évaluation
- Maths Model Question PaperDocument21 pagesMaths Model Question Papersp ilangovanPas encore d'évaluation
- 094 - MA8351, MA6566 Discrete Mathematics - Important QuestionsDocument39 pages094 - MA8351, MA6566 Discrete Mathematics - Important QuestionsSasi BalajiPas encore d'évaluation
- Solu 8Document35 pagesSolu 8Basil Aziz TinahPas encore d'évaluation
- Solu 9Document37 pagesSolu 9Opaque Cheshire0% (1)
- Leibniz Integral Rule - WikipediaDocument70 pagesLeibniz Integral Rule - WikipediaMannu Bhattacharya100% (1)
- Ordinary Differential Equations OdesDocument25 pagesOrdinary Differential Equations OdesDeepshikhaSinghPas encore d'évaluation
- List of Mathematical Symbols - Wikipedia PDFDocument22 pagesList of Mathematical Symbols - Wikipedia PDFChorinho Atkinson LauriePas encore d'évaluation
- Conformal MappingsDocument22 pagesConformal Mappingsjeff_hammonds351100% (1)
- Vector Field: Vector Fields On Subsets of Euclidean SpaceDocument8 pagesVector Field: Vector Fields On Subsets of Euclidean SpaceDiego VillalobosPas encore d'évaluation
- Lecture 3 Extremum ProblemsDocument14 pagesLecture 3 Extremum ProblemsDaniel Agbaje100% (1)
- Practice Final II - SolutionDocument9 pagesPractice Final II - SolutionGeoff SimmonsPas encore d'évaluation
- Measure Theory Notes Anwar KhanDocument171 pagesMeasure Theory Notes Anwar KhanMegan SPas encore d'évaluation
- Complex Analysis Iqra LiaqatDocument468 pagesComplex Analysis Iqra LiaqatAli Hassa0% (1)
- Predictor-Corrector MethodDocument10 pagesPredictor-Corrector Method064 Jayapratha P RPas encore d'évaluation
- Numerical Analysis Module 2 Fundamentals of Vector SpacesDocument33 pagesNumerical Analysis Module 2 Fundamentals of Vector Spacespartha4uPas encore d'évaluation
- Linear FunctionalsDocument7 pagesLinear Functionalshyd arnes100% (1)
- Pages From Gri2 PDFDocument146 pagesPages From Gri2 PDFyuritziPas encore d'évaluation
- Solution of Fredholm Integral Equations by CollocationDocument4 pagesSolution of Fredholm Integral Equations by Collocationrodwellhead100% (1)
- List of Topics For ASSMS Admission TestDocument3 pagesList of Topics For ASSMS Admission TestMahwish RabbaniPas encore d'évaluation
- Fluid McqsDocument10 pagesFluid Mcqsfloret leoPas encore d'évaluation
- Wiedemann Franz LawDocument3 pagesWiedemann Franz LawAleš NagodePas encore d'évaluation
- Affine CipherDocument3 pagesAffine CipheramitpandaPas encore d'évaluation
- Center Manifold ReductionDocument8 pagesCenter Manifold Reductionsunoval2013100% (2)
- DM Important Questions-1Document3 pagesDM Important Questions-1Sudhakar reddyPas encore d'évaluation
- Normal Forms (Logic) PDFDocument36 pagesNormal Forms (Logic) PDFmarsPas encore d'évaluation
- Unit Pfaffian Differential Equations: StructureDocument30 pagesUnit Pfaffian Differential Equations: StructureIrene WambuiPas encore d'évaluation
- Max-Flow Problem and Augmenting Path AlgorithmDocument26 pagesMax-Flow Problem and Augmenting Path AlgorithmHuy ThongPas encore d'évaluation
- Cauchy's TheoremDocument20 pagesCauchy's TheoremCyber_king123Pas encore d'évaluation
- VOLTERRA INTEGRAL EQUATIONS .RuDocument15 pagesVOLTERRA INTEGRAL EQUATIONS .RujokdannyPas encore d'évaluation
- EE 769 Introduction To Machine Learning: Sheet 4 - 2020-21-2 Linear ClassificationDocument4 pagesEE 769 Introduction To Machine Learning: Sheet 4 - 2020-21-2 Linear ClassificationANURAG DIXITPas encore d'évaluation
- Inverse and Implicit Function TheoremDocument4 pagesInverse and Implicit Function TheoremkelvinlPas encore d'évaluation
- Haar WaveletsDocument4 pagesHaar WaveletsSumapriya PhilipPas encore d'évaluation
- Solu 10Document43 pagesSolu 10c_nonePas encore d'évaluation
- Quantum Tunneling Through A BarrierDocument12 pagesQuantum Tunneling Through A Barrierjasmine-rPas encore d'évaluation
- The Handshaking LemmaDocument14 pagesThe Handshaking LemmaYusuf AmirudinPas encore d'évaluation
- Analytical Solutions For The Flow of Carreau and Cross Fluids in Circular Pipes and Thin SlitsDocument27 pagesAnalytical Solutions For The Flow of Carreau and Cross Fluids in Circular Pipes and Thin SlitsTaha SochiPas encore d'évaluation
- Max-Flow Min-Cut ProblemsDocument9 pagesMax-Flow Min-Cut ProblemsJuan Miguel GarciaPas encore d'évaluation
- Chapter 2: Algorithms: Abstraction. by This We Mean That FromDocument11 pagesChapter 2: Algorithms: Abstraction. by This We Mean That FromChris ChuaPas encore d'évaluation
- Chapter 1 Introduction To Numerical Method 1Document32 pagesChapter 1 Introduction To Numerical Method 1Rohan sharmaPas encore d'évaluation
- Theoretical DistributionDocument4 pagesTheoretical DistributionAtul JhariyaPas encore d'évaluation
- Jacobi MethodDocument2 pagesJacobi MethodJuancho SotilloPas encore d'évaluation
- Problems Chaptr 1 PDFDocument4 pagesProblems Chaptr 1 PDFcaught inPas encore d'évaluation
- MC Question - Solution CH 05.05 Spline Method PDFDocument8 pagesMC Question - Solution CH 05.05 Spline Method PDFMaximiliano FaríaPas encore d'évaluation
- Grad Proj Method 2 June 2022Document14 pagesGrad Proj Method 2 June 2022Orizon FerreiraPas encore d'évaluation
- Worksheet On Vector Valued FunctionsDocument6 pagesWorksheet On Vector Valued FunctionsvietboiiPas encore d'évaluation
- CH 4Document14 pagesCH 4Nazia EnayetPas encore d'évaluation
- Regula Falsi Method TheoryDocument3 pagesRegula Falsi Method TheoryAnurag Priyadarshi100% (1)
- Bisection Method TheoryDocument3 pagesBisection Method TheoryAnurag PriyadarshiPas encore d'évaluation
- Bulk Diffraction Selection Rules For Common Conventional Unit CellsDocument1 pageBulk Diffraction Selection Rules For Common Conventional Unit CellsAnurag PriyadarshiPas encore d'évaluation
- Project Work On Okhla Bird SanctuaryDocument41 pagesProject Work On Okhla Bird SanctuaryAnurag Priyadarshi75% (4)
- Trigonometry ReviewerDocument2 pagesTrigonometry Reviewerapi-19965132Pas encore d'évaluation
- Graphing and Solving Quadratic Inequalities: You Should LearnDocument7 pagesGraphing and Solving Quadratic Inequalities: You Should LearnSeif Sameh MohamedPas encore d'évaluation
- Multiplication Year 2 Maths Worksheets FreeDocument32 pagesMultiplication Year 2 Maths Worksheets Freevarmen vemal100% (1)
- Sin (1/x), Fplot Command - y Sin (X), Area (X, Sin (X) ) - y Exp (-X. X), Barh (X, Exp (-X. X) )Document26 pagesSin (1/x), Fplot Command - y Sin (X), Area (X, Sin (X) ) - y Exp (-X. X), Barh (X, Exp (-X. X) )ayman hammadPas encore d'évaluation
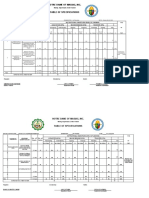
- Notre Dame of Masiag, Inc.: TopicsDocument4 pagesNotre Dame of Masiag, Inc.: TopicsKeneth Rose FagtananPas encore d'évaluation
- Maths Entry Test 1 1Document27 pagesMaths Entry Test 1 1Tishana ThompsonPas encore d'évaluation
- Mathematics For Olympiads and Talent Search Competitions For Class 7 - NodrmDocument498 pagesMathematics For Olympiads and Talent Search Competitions For Class 7 - NodrmNEET/AAIMS COMPLETE PREPARATION100% (1)
- Good Hope 1718 Paper 1 Marking PDFDocument11 pagesGood Hope 1718 Paper 1 Marking PDFVincent haPas encore d'évaluation
- Solving Quadratics by Factorising 1 PDFDocument3 pagesSolving Quadratics by Factorising 1 PDFcarolinethami13Pas encore d'évaluation
- MIT 213 Day 2 - ADocument17 pagesMIT 213 Day 2 - AprageethmohottyPas encore d'évaluation
- Year 10 International Maths Revision ListDocument3 pagesYear 10 International Maths Revision ListAmy KimPas encore d'évaluation
- Class Ix - Annual Examination Mathematics: SECTION A (40 Marks)Document8 pagesClass Ix - Annual Examination Mathematics: SECTION A (40 Marks)Hopper PlaysPas encore d'évaluation
- 3.b MeasurementsDocument23 pages3.b MeasurementsAnthony Benson100% (1)
- Linx JCSF Mathematics (Problems and Elements)Document38 pagesLinx JCSF Mathematics (Problems and Elements)Kim Howard CastilloPas encore d'évaluation
- fx-115ES fx-991ES: User's GuideDocument75 pagesfx-115ES fx-991ES: User's Guideapi-294268347Pas encore d'évaluation
- New General Mathematics 3Document298 pagesNew General Mathematics 3Keiron Cyrus91% (118)
- DLL Math G4 Q2 W3Document6 pagesDLL Math G4 Q2 W3Daniel MingoyPas encore d'évaluation
- CAT 1994 ExplanationsDocument14 pagesCAT 1994 ExplanationsSuporna GhoshPas encore d'évaluation
- Singapore International Mathematical Olympiad Training ProblemsDocument5 pagesSingapore International Mathematical Olympiad Training ProblemsKanchit SaehoPas encore d'évaluation
- Intermediate Algebra With Applications and Visualization 3rd Edition Rockswold Krieger Test BankDocument22 pagesIntermediate Algebra With Applications and Visualization 3rd Edition Rockswold Krieger Test Bankveronica100% (22)
- 1 4 PacketDocument7 pages1 4 Packetapi-326933003Pas encore d'évaluation
- 4.1 Trigonometric RatiosDocument20 pages4.1 Trigonometric RatiosHafizuddin ZamriPas encore d'évaluation
- Modul Nadi Kasih 2017Document62 pagesModul Nadi Kasih 2017Ros Anita ARPas encore d'évaluation
- Ncert Maths 8Document288 pagesNcert Maths 8Amreedhya BeraPas encore d'évaluation
- Trigonometry PDFDocument16 pagesTrigonometry PDFdoss mPas encore d'évaluation
- Module Overview: GE 7 Mathematics in The Modern World Module 5: Mathematical SystemDocument23 pagesModule Overview: GE 7 Mathematics in The Modern World Module 5: Mathematical SystemLotis Datuin100% (1)
- A Line ABDocument5 pagesA Line ABnabalsinghPas encore d'évaluation
- 62.3 2d Pythagoras Trigonometry - Cie Igcse Maths 0580-Ext Theory-QpDocument5 pages62.3 2d Pythagoras Trigonometry - Cie Igcse Maths 0580-Ext Theory-Qpnamakuleli_143319411Pas encore d'évaluation
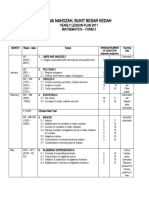
- Sma Nahdzah, Bukit Besar Kedah: Yearly Lesson Plan 2011 Mathematics - Form 3Document3 pagesSma Nahdzah, Bukit Besar Kedah: Yearly Lesson Plan 2011 Mathematics - Form 3Mizi RomliPas encore d'évaluation
- Pre-Calculus Math 40s Standards Test - Trigonometry II QUESTIONSDocument17 pagesPre-Calculus Math 40s Standards Test - Trigonometry II QUESTIONShmdniltfiPas encore d'évaluation