Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Technical Service Manual For KempomatDocument53 pagesTechnical Service Manual For KempomatAugustoferreira Ferreira100% (1)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Flight ControllerDocument19 pagesFlight ControllerPrajvi Udar100% (3)
- ASIC Interview Question & Answer - ASIC VerificationDocument3 pagesASIC Interview Question & Answer - ASIC Verificationprodip7Pas encore d'évaluation
- Electrical and Electronic Installation For IACSDocument60 pagesElectrical and Electronic Installation For IACSKenneth TanPas encore d'évaluation
- Transfomer ParametersDocument4 pagesTransfomer ParametersSadia Sultana Likhan0% (1)
- Advanced PythonDocument39 pagesAdvanced PythonSalasPas encore d'évaluation
- Control stepper speed and position with AccelStepper libraryDocument2 pagesControl stepper speed and position with AccelStepper librarySalasPas encore d'évaluation
- EE423 Transducer in InstrumentationDocument1 pageEE423 Transducer in InstrumentationPrasanthPas encore d'évaluation
- 1976 Bookmatter SpectrosDocument10 pages1976 Bookmatter SpectrosSalasPas encore d'évaluation
- Catalog Hoap 2Document0 pageCatalog Hoap 2jiji1183Pas encore d'évaluation
- Inovance Md310 VFD Quick Guide English 20-4-20Document64 pagesInovance Md310 VFD Quick Guide English 20-4-20phu chuPas encore d'évaluation
- Fresh Water Unit Jowa PDFDocument148 pagesFresh Water Unit Jowa PDFLuca PencoPas encore d'évaluation
- Acon (Polymer Thru-Hole) RF SeriesDocument3 pagesAcon (Polymer Thru-Hole) RF SeriesfiilckyzkurvenyPas encore d'évaluation
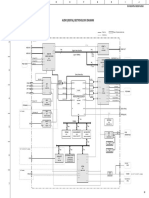
- Block Diagrams: Audio (Digital) Section Block DiagramDocument19 pagesBlock Diagrams: Audio (Digital) Section Block DiagramAran Jed HostelleroPas encore d'évaluation
- Elevator Control Module User's ManualDocument44 pagesElevator Control Module User's ManualWissam RgailyPas encore d'évaluation
- Lesson 6 PID Control of Heat Exchanger Temp PDFDocument2 pagesLesson 6 PID Control of Heat Exchanger Temp PDFJenny GoPas encore d'évaluation
- Polimobil PlusDocument8 pagesPolimobil Plusrossi100% (1)
- Operation of a Pulse RadarDocument2 pagesOperation of a Pulse RadarVaibhav VyasPas encore d'évaluation
- Deh-X6650bt Deh-X4650bt Operating Manual (Eng-Por-Esp)Document72 pagesDeh-X6650bt Deh-X4650bt Operating Manual (Eng-Por-Esp)lgszlgsz0% (1)
- Engineering eBooks Download SiteDocument303 pagesEngineering eBooks Download SiteMahesh TekiPas encore d'évaluation
- Public Address Amplifier: User'S ManualDocument16 pagesPublic Address Amplifier: User'S ManualganiPas encore d'évaluation
- Seisgram2K PQL Datawiewer Winscp Teraterm: Monitoring The EarthDocument2 pagesSeisgram2K PQL Datawiewer Winscp Teraterm: Monitoring The EarthLuna FitrianaPas encore d'évaluation
- New Step-Up and Step-Down 18-Pulse Direct Asymmetric Autotransformer Rectifier UnitsDocument7 pagesNew Step-Up and Step-Down 18-Pulse Direct Asymmetric Autotransformer Rectifier UnitsMaikPortnoyPas encore d'évaluation
- Ne Waved Pa Concept PowerDocument118 pagesNe Waved Pa Concept PowerhighwtonPas encore d'évaluation
- Q4 2023 India RE Update - JMK Research - RevisedDocument32 pagesQ4 2023 India RE Update - JMK Research - RevisedJhajjarPas encore d'évaluation
- Seaeye Tiger & Lynx: Observation and Inspection Class RovsDocument4 pagesSeaeye Tiger & Lynx: Observation and Inspection Class RovsPWkannonPas encore d'évaluation
- Safety Manual Locator GuideDocument34 pagesSafety Manual Locator Guidemfj796075550% (1)
- PhoenexDocument8 pagesPhoenexSebastián LagosPas encore d'évaluation
- CNSSAM - 01 - 13 - Red Black Installation GuidanceDocument43 pagesCNSSAM - 01 - 13 - Red Black Installation GuidanceTim_CPas encore d'évaluation
- KAP 12-24 KV 300 ENACC MVACC DS ENDocument1 pageKAP 12-24 KV 300 ENACC MVACC DS ENMd Imran pashaPas encore d'évaluation
- Institute of Aeronautical Engineering (Autonomous) : Electronics and Communication EngineeringDocument23 pagesInstitute of Aeronautical Engineering (Autonomous) : Electronics and Communication EngineeringMano HarPas encore d'évaluation
- CPU fan controller project uses PSOC for temperature-based speed controlDocument4 pagesCPU fan controller project uses PSOC for temperature-based speed controlmantorulePas encore d'évaluation
- Preliminary Program ICHQP 2014 PDFDocument22 pagesPreliminary Program ICHQP 2014 PDFRadislav MilankovPas encore d'évaluation
- Paper - 3 Set ADocument7 pagesPaper - 3 Set Afakir mohammadPas encore d'évaluation