Vous aimerez peut-être aussi
- Trabajo - 200 Años de IndependenciaDocument12 pagesTrabajo - 200 Años de IndependenciaRomero M Jose APas encore d'évaluation
- Recosido Simulado PDFDocument2 pagesRecosido Simulado PDFVictor Yeampier Caxi Maqueda100% (1)
- Trabajo - Diccionario de Palabras ColoquialesDocument31 pagesTrabajo - Diccionario de Palabras ColoquialesRomero M Jose APas encore d'évaluation
- Trabajo - 200 Años de IndependenciaDocument9 pagesTrabajo - 200 Años de IndependenciaRomero M Jose APas encore d'évaluation
- Analisis Critico - CuestionarioDocument1 pageAnalisis Critico - CuestionarioRomero M Jose APas encore d'évaluation
- Trabajo - Funciones CónicasDocument16 pagesTrabajo - Funciones CónicasRomero M Jose APas encore d'évaluation
- Trabajo - Prueba de HipotesisDocument15 pagesTrabajo - Prueba de HipotesisRomero M Jose APas encore d'évaluation
- Ejercicios Unidad IIDocument3 pagesEjercicios Unidad IIRomero M Jose APas encore d'évaluation
- AutoritariaadoDocument2 pagesAutoritariaadoRomero M Jose APas encore d'évaluation
- Práctica 1 A-2016Document3 pagesPráctica 1 A-2016Romero M Jose APas encore d'évaluation
- Analisis Critico - Madre Como LiderDocument1 pageAnalisis Critico - Madre Como LiderRomero M Jose APas encore d'évaluation
- Semana 1Document1 pageSemana 1Romero M Jose APas encore d'évaluation
- Trabajo - Bolivar Como Reformador SocialDocument19 pagesTrabajo - Bolivar Como Reformador SocialRomero M Jose APas encore d'évaluation
- Trabajo - Prueba de HipotesisDocument15 pagesTrabajo - Prueba de HipotesisRomero M Jose APas encore d'évaluation
- Opsu - LuisDocument1 pageOpsu - LuisRomero M Jose APas encore d'évaluation
- KeiswuerDocument1 pageKeiswuerRomero M Jose APas encore d'évaluation
- Trabajo - Programacion en CDocument11 pagesTrabajo - Programacion en CRomero M Jose APas encore d'évaluation
- Trabajo - 200 Años de IndependenciaDocument9 pagesTrabajo - 200 Años de IndependenciaRomero M Jose APas encore d'évaluation
- Clase 01Document11 pagesClase 01Romero M Jose APas encore d'évaluation
- HornosDocument22 pagesHornosRomero M Jose APas encore d'évaluation
- Valores Esperados y MomentosDocument35 pagesValores Esperados y MomentosRomero M Jose A100% (3)
- Guía 1 - Formulacion de Problemas-1Document5 pagesGuía 1 - Formulacion de Problemas-1ecordova810% (1)
- Practicas y oDocument28 pagesPracticas y oGabriel CortesPas encore d'évaluation
- Requisitos BecaDocument2 pagesRequisitos BecaRomero M Jose APas encore d'évaluation
- Registro IntensivoDocument1 pageRegistro IntensivoRomero M Jose APas encore d'évaluation
- Trabajo - Funciones CónicasDocument16 pagesTrabajo - Funciones CónicasRomero M Jose APas encore d'évaluation
- Modelado de Sistemas FisicosDocument13 pagesModelado de Sistemas FisicosRomero M Jose APas encore d'évaluation
- PELICULASDocument8 pagesPELICULASRomero M Jose APas encore d'évaluation
- Curriculo - Luis MendozaDocument2 pagesCurriculo - Luis MendozaRomero M Jose APas encore d'évaluation
- Recubrimientos AnticorrosivosDocument75 pagesRecubrimientos AnticorrosivosKarina PrietoPas encore d'évaluation
- Examen Med Anulado 27-04-21Document7 pagesExamen Med Anulado 27-04-21Fernando PantaPas encore d'évaluation
- Semana 02Document16 pagesSemana 02Em LePas encore d'évaluation
- Necesidad Del Grado de Real Arco para El Maestro MasónDocument5 pagesNecesidad Del Grado de Real Arco para El Maestro Masóncarneirojimenez67% (3)
- 1 A INFORMATICA Componentes ElectronicosDocument3 pages1 A INFORMATICA Componentes ElectronicosAngel GoyesPas encore d'évaluation
- Ingeniería de TránsitoDocument10 pagesIngeniería de TránsitoSilvia Cortés VallejoPas encore d'évaluation
- Metodos de Estudio Del Sistema NerviosoDocument13 pagesMetodos de Estudio Del Sistema NerviosoYulieth MoraPas encore d'évaluation
- Cotizacion TRIPLE A 26 - 1Document1 pageCotizacion TRIPLE A 26 - 1irvin calixPas encore d'évaluation
- TrabajoDocument6 pagesTrabajodanielchancusig4Pas encore d'évaluation
- Interaccion de Los RX Con La Materia - Radiacion Dispersa DZDocument13 pagesInteraccion de Los RX Con La Materia - Radiacion Dispersa DZClari CorreaPas encore d'évaluation
- Influencia de La Temperatura Sobre La Presión Ejercida Por Un GasDocument6 pagesInfluencia de La Temperatura Sobre La Presión Ejercida Por Un GasElvis AguilarPas encore d'évaluation
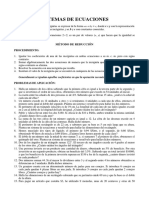
- Sistemas de EcuacionesDocument5 pagesSistemas de EcuacionesAndrès SolizPas encore d'évaluation
- Catalogo Torres de Enfriamiento 2015-2Document8 pagesCatalogo Torres de Enfriamiento 2015-2Mauro MartinzPas encore d'évaluation
- Plaza de Mercado La ConcordiaDocument4 pagesPlaza de Mercado La ConcordiaMaria Natalia Morales SilvaPas encore d'évaluation
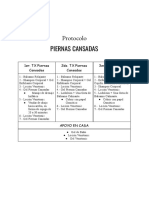
- Protocolo Piernas Cansadas: 1er. TX Piernas Cansadas 2do. TX Piernas Cansadas 3er. TX Piernas CansadasDocument3 pagesProtocolo Piernas Cansadas: 1er. TX Piernas Cansadas 2do. TX Piernas Cansadas 3er. TX Piernas CansadasAnaPas encore d'évaluation
- CIENCIAS NATURALES Martes de Prueba 1y2Document5 pagesCIENCIAS NATURALES Martes de Prueba 1y2Andres TorresPas encore d'évaluation
- Comida SaludableDocument2 pagesComida SaludableMarian Rocha CamachoPas encore d'évaluation
- Guia de Elaboración de Informe de Laboratorio-2Document5 pagesGuia de Elaboración de Informe de Laboratorio-2Cami ZambraniPas encore d'évaluation
- 2 - Proceso de CristalizaciónDocument34 pages2 - Proceso de CristalizaciónBren AcPas encore d'évaluation
- Reuso Del Espacio Patrimonial y Sociedad CivilDocument33 pagesReuso Del Espacio Patrimonial y Sociedad CivilJorge Ortiz ColomPas encore d'évaluation
- Triptico MajesDocument2 pagesTriptico Majesckarloss100% (1)
- Jean Paul Margot La FelicidadDocument32 pagesJean Paul Margot La Felicidadroromero0% (1)
- MakroAhorro Food 12Document17 pagesMakroAhorro Food 12Lucho ClaiPas encore d'évaluation
- 4.3 Balanceo Dinámico en Uno y Dos Planos Por El Método de Coeficientes de InfluenciaDocument22 pages4.3 Balanceo Dinámico en Uno y Dos Planos Por El Método de Coeficientes de InfluenciaEnrique FanesPas encore d'évaluation
- Cuadro Manjar Blanco TerminadoDocument3 pagesCuadro Manjar Blanco TerminadoJhordy Maycol Rodas Quiroz0% (1)
- Practica #5 Tecnicas de Coloración01Document4 pagesPractica #5 Tecnicas de Coloración01neyer ivanPas encore d'évaluation
- Capitulo 3Document37 pagesCapitulo 3César Leyva VPas encore d'évaluation
- CASO CLINICO Semana 3Document5 pagesCASO CLINICO Semana 3Andre BarretoPas encore d'évaluation
- Solución de La Tarea NDocument2 pagesSolución de La Tarea NSelene Terrones TorresPas encore d'évaluation
- Ancy Los TomasDocument1 pageAncy Los TomasjayronPas encore d'évaluation