Vous aimerez peut-être aussi
- Iec 61131-3 ExposicionDocument15 pagesIec 61131-3 ExposicionMaria Camila Calderon CardozoPas encore d'évaluation
- KinectDocument7 pagesKinectMaria Camila Calderon CardozoPas encore d'évaluation
- Filtros FIR e IIRDocument3 pagesFiltros FIR e IIRMaria Camila Calderon CardozoPas encore d'évaluation
- Sensor InductivoDocument5 pagesSensor InductivoMaria Camila Calderon CardozoPas encore d'évaluation
- Sensores FinalDocument39 pagesSensores FinalMaria Camila Calderon CardozoPas encore d'évaluation
- Sistema Eletrico Scania CompletoDocument73 pagesSistema Eletrico Scania CompletoBerišlavWladimirVladiloPeric100% (11)
- Gestión RAIDDocument4 pagesGestión RAIDIsabel LópezPas encore d'évaluation
- 04.CJ211 04 Maintenance Instructions S222.362-01.EsDocument114 pages04.CJ211 04 Maintenance Instructions S222.362-01.EscesarPas encore d'évaluation
- Actividad InteractivaDocument12 pagesActividad InteractivaClark KentPas encore d'évaluation
- Proyecto Equipo 3Document26 pagesProyecto Equipo 3Juan AntonioPas encore d'évaluation
- Manual JS125-F PDFDocument32 pagesManual JS125-F PDFHelmust CharaPas encore d'évaluation
- Plan de MantenimientoDocument23 pagesPlan de MantenimientokattyPas encore d'évaluation
- 5-2-1 Clasificacion de Elementos de UnionDocument50 pages5-2-1 Clasificacion de Elementos de UnionEducacio Visual100% (3)
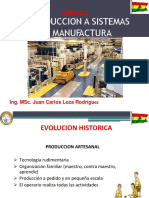
- Tema 1 Introduccion Sistemas ManufacturaDocument25 pagesTema 1 Introduccion Sistemas ManufacturaRicardo Dencker CortezPas encore d'évaluation
- EGS002 Manual enDocument6 pagesEGS002 Manual enAnonymous 5EJjCnYeMy100% (1)
- Relevadores de Protección de Sobre CorrienteDocument31 pagesRelevadores de Protección de Sobre CorrientejosePas encore d'évaluation
- Como Seguir Una Falla en Una Placa Que No EnciendeDocument4 pagesComo Seguir Una Falla en Una Placa Que No EnciendeJorge Eliecer DelgadoPas encore d'évaluation
- 6K4L2LT#ABMDocument4 pages6K4L2LT#ABMrodrigo gonzalezPas encore d'évaluation
- Capacitacion SLATE Nov.2020Document114 pagesCapacitacion SLATE Nov.2020INFOMATICA JCT100% (2)
- Proceso de DigitaciónDocument15 pagesProceso de DigitaciónGarcés Juan SebastianPas encore d'évaluation
- Inf 4º Ejercicios Unidad 1 - MODIFDocument4 pagesInf 4º Ejercicios Unidad 1 - MODIFSonny BurnetPas encore d'évaluation
- Zonas de ProtecciónDocument5 pagesZonas de Proteccióncarlos sanchezPas encore d'évaluation
- ¿Cómo Reconstruir El Archivo BCD y El Registro de Arranque Maestro (MBR) en Windows 10 - Reparar InfoDocument10 pages¿Cómo Reconstruir El Archivo BCD y El Registro de Arranque Maestro (MBR) en Windows 10 - Reparar InfoJota M.Pas encore d'évaluation
- IT Essentials 2018 Cap 1Document115 pagesIT Essentials 2018 Cap 1Vaneziita Uribe DelgadoPas encore d'évaluation
- Informes TecnicosDocument2 pagesInformes Tecnicosdae jimPas encore d'évaluation
- Lógica CableadaDocument7 pagesLógica CableadaLuis MataPas encore d'évaluation
- INFORME SumadoresDocument2 pagesINFORME SumadoresDanielPas encore d'évaluation
- Almacenamiento UsbsDocument4 pagesAlmacenamiento Usbsapi-468050138Pas encore d'évaluation
- Introduccion A La Informatica - 1ers - 7semana - MDPDocument3 pagesIntroduccion A La Informatica - 1ers - 7semana - MDPnysels02Pas encore d'évaluation
- Guia RapidaDocument20 pagesGuia RapidaMiguel De Castro MiguelPas encore d'évaluation
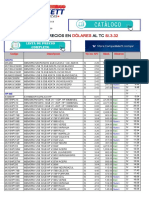
- Lista PreciosDocument2 pagesLista PreciosDjedisson NapaPas encore d'évaluation
- Ranking de CPU SDocument39 pagesRanking de CPU SclegracielaPas encore d'évaluation
- Manual FujitaDocument113 pagesManual Fujitapayazon88% (8)
- Capitulo 10 PDFDocument33 pagesCapitulo 10 PDFjeremyPas encore d'évaluation
- Arquitectura de Computadores Lab 2 PDFDocument18 pagesArquitectura de Computadores Lab 2 PDFruizgPas encore d'évaluation