Vous aimerez peut-être aussi
- 08 Small OscillationDocument37 pages08 Small OscillationRithish BarathPas encore d'évaluation
- Ekman Flow ExerciseDocument4 pagesEkman Flow ExerciseArief WibowoPas encore d'évaluation
- R Course 2014: Lecture 7Document45 pagesR Course 2014: Lecture 7GCEIDPas encore d'évaluation
- Furevik - (Exercise) Atmosphere Ocean DynamicDocument69 pagesFurevik - (Exercise) Atmosphere Ocean Dynamicraiz123Pas encore d'évaluation
- Arfken Weber Math Selected Problem SolutionDocument79 pagesArfken Weber Math Selected Problem SolutionClaudia VianaPas encore d'évaluation
- MSCPH 508Document228 pagesMSCPH 508Sukhmander SinghPas encore d'évaluation
- Idl Meteo IntroDocument39 pagesIdl Meteo IntrojjanuePas encore d'évaluation
- Movements of Ocean Water - Ocean Currents, TidesDocument6 pagesMovements of Ocean Water - Ocean Currents, TidesBhaskar Rao GopisettiPas encore d'évaluation
- Ocean Hydrodynamics QBank 02 PDFDocument19 pagesOcean Hydrodynamics QBank 02 PDFJai FrinzPas encore d'évaluation
- Merzbacher 3rd Problems 1 and 2Document2 pagesMerzbacher 3rd Problems 1 and 2Luke Burgess100% (1)
- 07 Hamiltonian MechanicsDocument74 pages07 Hamiltonian MechanicsRithish BarathPas encore d'évaluation
- Electricity-And Magnetism PDFDocument872 pagesElectricity-And Magnetism PDFMokshPas encore d'évaluation
- St. Paul University Philippines Graduate School: A Course Presentation in StatisticsDocument103 pagesSt. Paul University Philippines Graduate School: A Course Presentation in StatisticsRoselle Mae BinolocPas encore d'évaluation
- Chapter 7 - Time SeriesDocument37 pagesChapter 7 - Time SeriestrmpPas encore d'évaluation
- Manual Harmonic Analysis and Prediction of TidesDocument331 pagesManual Harmonic Analysis and Prediction of TidesNur DiyanaPas encore d'évaluation
- Mathematical Methods For Physicist Weber & Arfken ch.3 Selected SolutionsDocument9 pagesMathematical Methods For Physicist Weber & Arfken ch.3 Selected SolutionsJosh BrewerPas encore d'évaluation
- Krishna's - MechanicsDocument437 pagesKrishna's - Mechanicssharmila .T100% (1)
- Chap8 HM PDFDocument114 pagesChap8 HM PDFaboudy noureddinePas encore d'évaluation
- Study BookDocument316 pagesStudy BookTom JoynerPas encore d'évaluation
- Seefeld-Statistics Using R With Biological Examples PDFDocument325 pagesSeefeld-Statistics Using R With Biological Examples PDFManuel LoGaPas encore d'évaluation
- Ggplot2: A Layer-Based Introduction NYC R Meetup October 1st, 2009 Harlan D. Harris Harlan@harris - Name December 3rdDocument25 pagesGgplot2: A Layer-Based Introduction NYC R Meetup October 1st, 2009 Harlan D. Harris Harlan@harris - Name December 3rdjuneaftnPas encore d'évaluation
- Lecture notes on Mathematical Classical MechanicsDocument110 pagesLecture notes on Mathematical Classical MechanicsViral patelPas encore d'évaluation
- 16 Topics Ielts SpeakingDocument75 pages16 Topics Ielts SpeakingLinh Kha100% (1)
- Marsh Mathematica - ElectromagnetismDocument70 pagesMarsh Mathematica - ElectromagnetismAlejandro GabrielPas encore d'évaluation
- Introduction To Functional Analysis - Goetz GrammelDocument33 pagesIntroduction To Functional Analysis - Goetz GrammelLaura RadoiPas encore d'évaluation
- CH 05Document64 pagesCH 05sk112Pas encore d'évaluation
- Libro de Estadística - Omar AlcaláDocument283 pagesLibro de Estadística - Omar AlcaláSebastián Ramirez100% (1)
- Manual SalinasDocument90 pagesManual SalinasRenan AlvesPas encore d'évaluation
- Computing The Solar Vector 01Document11 pagesComputing The Solar Vector 01Anny Radas GoicocheaPas encore d'évaluation
- Galois Solutions PDFDocument23 pagesGalois Solutions PDFAbir KayalPas encore d'évaluation
- Solutions To StrogatzDocument2 pagesSolutions To StrogatzRamesh KadambiPas encore d'évaluation
- What Is A Cox Model?: Sponsored by An Educational Grant From Aventis PharmaDocument8 pagesWhat Is A Cox Model?: Sponsored by An Educational Grant From Aventis PharmaIswahyudi AlamsyahPas encore d'évaluation
- Geostatistics article from American StatisticianDocument7 pagesGeostatistics article from American StatisticianDilson David Ramirez ForeroPas encore d'évaluation
- Book IntroStatistics PDFDocument263 pagesBook IntroStatistics PDFErick Saldaña VillaPas encore d'évaluation
- Chapter 9 Cox Proportional Hazards: Library (Survival)Document10 pagesChapter 9 Cox Proportional Hazards: Library (Survival)Yosef GUEVARA SALAMANCAPas encore d'évaluation
- Download Descargar libro de geometria analitica de ricardo figueroa bookDocument3 pagesDownload Descargar libro de geometria analitica de ricardo figueroa bookJuniorPas encore d'évaluation
- Pulsed NMR Grad LabDocument3 pagesPulsed NMR Grad LabSumith SaleheenPas encore d'évaluation
- MTH 424 IITK Quiz SolutionsDocument2 pagesMTH 424 IITK Quiz SolutionsMayur GuptaPas encore d'évaluation
- Intermediate R - Nonlinear Regression in RDocument4 pagesIntermediate R - Nonlinear Regression in RVivay SalazarPas encore d'évaluation
- Quantum Mechanics Zettli Chap 2, 3 Exercise SolutionDocument37 pagesQuantum Mechanics Zettli Chap 2, 3 Exercise SolutionAamir Mahmood0% (1)
- Objective Criteria for Evaluating Clustering MethodsDocument6 pagesObjective Criteria for Evaluating Clustering Methodsadin80Pas encore d'évaluation
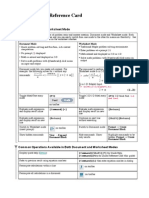
- Maple 13 Quick Reference Card: Document Mode vs. Worksheet ModeDocument5 pagesMaple 13 Quick Reference Card: Document Mode vs. Worksheet ModeteachopensourcePas encore d'évaluation
- Exercise 1 Instruction PcaDocument9 pagesExercise 1 Instruction PcaHanif IshakPas encore d'évaluation
- Analysis of Categorical DataDocument75 pagesAnalysis of Categorical DataMalik Shabbir AliPas encore d'évaluation
- A Brief Introduction To Atmospheric Dynamics: J. H. Lacasce, UioDocument61 pagesA Brief Introduction To Atmospheric Dynamics: J. H. Lacasce, UioyyasamannPas encore d'évaluation
- Econometrics of Panel Data ModelsDocument34 pagesEconometrics of Panel Data Modelsarmailgm100% (1)
- Kleinbaum D.G., Klein M., Logistic Regression - A Self-Learning Text (3ed, Springer, 2010,709p,) PDFDocument1 pageKleinbaum D.G., Klein M., Logistic Regression - A Self-Learning Text (3ed, Springer, 2010,709p,) PDFNasir AhmadPas encore d'évaluation
- Pure Birth ProcessesDocument13 pagesPure Birth ProcessesDaniel Mwaniki100% (1)
- Fourier Series and Transform PDFDocument407 pagesFourier Series and Transform PDFRanjeet KumarPas encore d'évaluation
- Stata Ts Introduction To Time-Series CommandsDocument6 pagesStata Ts Introduction To Time-Series CommandsngocmimiPas encore d'évaluation
- ARIMA Models - Part 1 ExplainedDocument20 pagesARIMA Models - Part 1 ExplainedDadedidoduPas encore d'évaluation
- What is Time Series Analysis? Understanding Trends & ForecastingDocument28 pagesWhat is Time Series Analysis? Understanding Trends & ForecastingNidhi KaushikPas encore d'évaluation
- Econometrics: Autocorrelation: What Happens If The Error Terms Are Correlated?Document43 pagesEconometrics: Autocorrelation: What Happens If The Error Terms Are Correlated?whoosh2008Pas encore d'évaluation
- Stationarity Issues in Time Series Models: David A. Dickey North Carolina State UniversityDocument17 pagesStationarity Issues in Time Series Models: David A. Dickey North Carolina State Universityaaditya01Pas encore d'évaluation
- AutocorrelationDocument36 pagesAutocorrelationIshanDograPas encore d'évaluation
- 405 Econometrics: by Domodar N. GujaratiDocument47 pages405 Econometrics: by Domodar N. Gujaratimuhendis_8900Pas encore d'évaluation
- 3 - 1 Transformations and AdjustmentsDocument7 pages3 - 1 Transformations and AdjustmentsVicente Camarillo AdamePas encore d'évaluation
- Models Time Series Data With AR, MA, ARMA and ARIMA ModelsDocument13 pagesModels Time Series Data With AR, MA, ARMA and ARIMA ModelsabdulraufhccPas encore d'évaluation
- Does A Real Exchange Rate Have A Mean Reverting Property?: e Be The Logarithm of Exchange Rate of A Country and PP BeDocument14 pagesDoes A Real Exchange Rate Have A Mean Reverting Property?: e Be The Logarithm of Exchange Rate of A Country and PP BePär SjölanderPas encore d'évaluation
- Time Series Analysis Using SAS The Augmented Dickey-Fuller (ADF) TestDocument6 pagesTime Series Analysis Using SAS The Augmented Dickey-Fuller (ADF) TestJimit R Zaveri PerfectionistPas encore d'évaluation
- Time Series Decomposition (2019)Document40 pagesTime Series Decomposition (2019)DadedidoduPas encore d'évaluation
- Assignment 2 - FIN 335 (2018)Document1 pageAssignment 2 - FIN 335 (2018)DadedidoduPas encore d'évaluation
- Public Relations (PR) .: Public Relations As Part of The Marketing Communications Mix. Public RelationsDocument3 pagesPublic Relations (PR) .: Public Relations As Part of The Marketing Communications Mix. Public RelationsDadedidoduPas encore d'évaluation
- PricingDocument2 pagesPricingDadedidoduPas encore d'évaluation
- Cases CompilationDocument49 pagesCases CompilationDadedidoduPas encore d'évaluation
- What Is Change? What Is Change?: Organizing: Organizing: Managing Change Managing Change and Innovation and InnovationDocument3 pagesWhat Is Change? What Is Change?: Organizing: Organizing: Managing Change Managing Change and Innovation and InnovationDadedidoduPas encore d'évaluation
- Exponential Smoothing (Part 1)Document20 pagesExponential Smoothing (Part 1)DadedidoduPas encore d'évaluation
- ARIMA Models - Part 1 ExplainedDocument20 pagesARIMA Models - Part 1 ExplainedDadedidoduPas encore d'évaluation
- UP School of Economics: Discussion PapersDocument42 pagesUP School of Economics: Discussion PapersNerissa PascuaPas encore d'évaluation
- Sales PromotionDocument1 pageSales PromotionDadedidoduPas encore d'évaluation
- Krugman Obstfeld ch02Document44 pagesKrugman Obstfeld ch02oykubayraktarPas encore d'évaluation
- Inflation Targeting BookDocument18 pagesInflation Targeting BookishaPas encore d'évaluation
- Franchising Convenience Around the World: The Rise of Southland CorpDocument28 pagesFranchising Convenience Around the World: The Rise of Southland CorpDadedidoduPas encore d'évaluation
- 2009 Family Income and Expenditure Survey: A. Identification and Other InformationDocument70 pages2009 Family Income and Expenditure Survey: A. Identification and Other InformationDadedidoduPas encore d'évaluation
- Chapter 3 - Modeling and Solving LP Problems RevDocument20 pagesChapter 3 - Modeling and Solving LP Problems Revekbalaji100% (3)
- Chapter 11Document5 pagesChapter 11DadedidoduPas encore d'évaluation
- Inflation Targeting BookDocument18 pagesInflation Targeting BookishaPas encore d'évaluation
- ATTENDANCE (Revised UP Code: Art. 346)Document1 pageATTENDANCE (Revised UP Code: Art. 346)DadedidoduPas encore d'évaluation
- Chapter 19 PDFDocument66 pagesChapter 19 PDFDadedidoduPas encore d'évaluation
- Amado Picart vs. Frank Smith JR.: Supreme CourtDocument4 pagesAmado Picart vs. Frank Smith JR.: Supreme CourtDadedidoduPas encore d'évaluation
- Inflation Targeting PDFDocument1 pageInflation Targeting PDFDadedidoduPas encore d'évaluation
- Chapter 18Document5 pagesChapter 18DadedidoduPas encore d'évaluation
- Relative Valuation: Comparing Companies Using MultiplesDocument29 pagesRelative Valuation: Comparing Companies Using MultiplesAbhinav VermaPas encore d'évaluation
- 3 Externalities Coase Private 2017Document28 pages3 Externalities Coase Private 2017DadedidoduPas encore d'évaluation
- Externality MicroeconomicsDocument38 pagesExternality MicroeconomicsDadedidoduPas encore d'évaluation
- Democracy and Legitimacy: Exploring Models and TheoriesDocument20 pagesDemocracy and Legitimacy: Exploring Models and TheoriesDadedidodu100% (1)
- Econ 101 (February 25, 2017)Document6 pagesEcon 101 (February 25, 2017)DadedidoduPas encore d'évaluation
- 1 PBDocument5 pages1 PBDadedidoduPas encore d'évaluation
- Digital Circuits Lab Experiment 1 - Logic Gates FundamentalsDocument7 pagesDigital Circuits Lab Experiment 1 - Logic Gates Fundamentalsfaizan bariPas encore d'évaluation
- JJJJJJJJJJJJJJJJJDocument16 pagesJJJJJJJJJJJJJJJJJNitin Suyan PanchalPas encore d'évaluation
- General Motion of Rigid BodyDocument18 pagesGeneral Motion of Rigid BodyphysicspalanichamyPas encore d'évaluation
- Business MathDocument7 pagesBusiness Mathlun3l1ght18Pas encore d'évaluation
- Pythagorean Theorem LessonDocument3 pagesPythagorean Theorem LessonFerdinand Asuncion0% (1)
- BSABE Study ProgramDocument4 pagesBSABE Study ProgramRaymarck PatricioPas encore d'évaluation
- Determinant Practice SheetDocument13 pagesDeterminant Practice Sheetfake lovePas encore d'évaluation
- Equation of Parabola Opens DownwardDocument33 pagesEquation of Parabola Opens DownwardJohn NavosPas encore d'évaluation
- 4 D Tomlin Modelo Cartografico PDFDocument14 pages4 D Tomlin Modelo Cartografico PDFMauricio GonzálezPas encore d'évaluation
- D1 - Review Excerise 2Document46 pagesD1 - Review Excerise 2Ahmed NurulPas encore d'évaluation
- Ace Analysis Additional Mathematics SPM - SPM Practice (Form 4, Chapter 1, Pg. 1-4) IDocument4 pagesAce Analysis Additional Mathematics SPM - SPM Practice (Form 4, Chapter 1, Pg. 1-4) I钰颖Pas encore d'évaluation
- Math Department Unit 1: Absolute Value Worksheet #1 Name MYP Year 3 Teacher Dema Aljariri DateDocument4 pagesMath Department Unit 1: Absolute Value Worksheet #1 Name MYP Year 3 Teacher Dema Aljariri Datedima alajririPas encore d'évaluation
- Intro MataDocument39 pagesIntro MatajoniakomPas encore d'évaluation
- Important Books For IIT (AskIITians)Document6 pagesImportant Books For IIT (AskIITians)AseemSharanPas encore d'évaluation
- Weekly Prototype Plan Week 1 General MathematicsDocument9 pagesWeekly Prototype Plan Week 1 General MathematicsLily Anne Ramos MendozaPas encore d'évaluation
- Class Xii Mathematics BookletDocument239 pagesClass Xii Mathematics BookletBasant KothariPas encore d'évaluation
- A General Algorithm For Building Z-Matrix Based On Transitional MatricesDocument4 pagesA General Algorithm For Building Z-Matrix Based On Transitional Matricesjaach78100% (1)
- Basic Math & Logarithm - DPP 06 (Of Lec 09) - Arjuna JEE 2024Document2 pagesBasic Math & Logarithm - DPP 06 (Of Lec 09) - Arjuna JEE 2024YASHPas encore d'évaluation
- Ap, GP, HPDocument29 pagesAp, GP, HPJay DayalPas encore d'évaluation
- Jupika:: Jurnal Pendidikan Matematika Universitas FloresDocument10 pagesJupika:: Jurnal Pendidikan Matematika Universitas FloresNina AlfianaPas encore d'évaluation
- DLL Math 1 q3 Week 3 d5 Lc42cDocument3 pagesDLL Math 1 q3 Week 3 d5 Lc42cMaica67% (3)
- Math5 SLHTQ2W4MELC M5NS LLD LLL.LDocument7 pagesMath5 SLHTQ2W4MELC M5NS LLD LLL.LMENCHUPas encore d'évaluation
- Course Notes: Week 2.: Math 270C: Applied Numerical Linear AlgebraDocument8 pagesCourse Notes: Week 2.: Math 270C: Applied Numerical Linear AlgebraShwetabh SrivastavaPas encore d'évaluation
- Math 10 Q1 M18Document14 pagesMath 10 Q1 M18JaredPas encore d'évaluation
- Representarea diagramatică și rezolvarea problemelor structurateDocument13 pagesRepresentarea diagramatică și rezolvarea problemelor structuratesimonaPas encore d'évaluation
- Lesson 1: Understanding The Normal Curve DistributionDocument22 pagesLesson 1: Understanding The Normal Curve DistributionBUTTERCUP SHIEPas encore d'évaluation
- Beam Deflection MethodsDocument14 pagesBeam Deflection MethodskishorechakravarthyPas encore d'évaluation
- Computer Science: Component 1 and Component 2Document8 pagesComputer Science: Component 1 and Component 2HappybabyPas encore d'évaluation
- Presentation On Public Key CryptographyDocument29 pagesPresentation On Public Key CryptographyAdnan YusufPas encore d'évaluation
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityD'EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityÉvaluation : 4.5 sur 5 étoiles4.5/5 (13)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationD'EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationPas encore d'évaluation
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)D'EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Évaluation : 4 sur 5 étoiles4/5 (4)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamD'EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamPas encore d'évaluation
- CEH Certified Ethical Hacker Practice Exams, Third EditionD'EverandCEH Certified Ethical Hacker Practice Exams, Third EditionPas encore d'évaluation
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamD'EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamÉvaluation : 5 sur 5 étoiles5/5 (1)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxD'EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (67)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionD'EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionÉvaluation : 5 sur 5 étoiles5/5 (4)
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireD'EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpirePas encore d'évaluation
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsD'EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsPas encore d'évaluation
- Amazon Web Services (AWS) Interview Questions and AnswersD'EverandAmazon Web Services (AWS) Interview Questions and AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366D'EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Pas encore d'évaluation
- CCST Cisco Certified Support Technician Study Guide: Networking ExamD'EverandCCST Cisco Certified Support Technician Study Guide: Networking ExamPas encore d'évaluation
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)D'EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Pas encore d'évaluation
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeD'EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeÉvaluation : 5 sur 5 étoiles5/5 (1)
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationD'EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationPas encore d'évaluation
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachD'EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsD'EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsPas encore d'évaluation
- IP Routing Protocols All-in-one: OSPF EIGRP IS-IS BGP Hands-on LabsD'EverandIP Routing Protocols All-in-one: OSPF EIGRP IS-IS BGP Hands-on LabsPas encore d'évaluation
- FTTx Networks: Technology Implementation and OperationD'EverandFTTx Networks: Technology Implementation and OperationÉvaluation : 5 sur 5 étoiles5/5 (1)