Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 140H Motor Grader XZHDocument18 pages140H Motor Grader XZHHebert Trujillo100% (2)
- D155B-II Operation ManualDocument186 pagesD155B-II Operation ManualViktor RadaPas encore d'évaluation
- Storage Procedure For Caterpillar Products (0355, 7000) : ShutdownDocument21 pagesStorage Procedure For Caterpillar Products (0355, 7000) : Shutdownmoises0% (1)
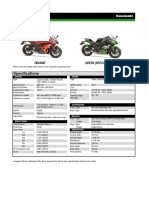
- Ninja 650 ABS E-Brochure PDFDocument1 pageNinja 650 ABS E-Brochure PDFAbang Mohd Saiful RahmanPas encore d'évaluation
- Kito Product GuideDocument5 pagesKito Product GuideKito CanadaPas encore d'évaluation
- MASS PROPERTIES and ADVANCED AUTOMOTIVE PDFDocument330 pagesMASS PROPERTIES and ADVANCED AUTOMOTIVE PDFNuraini Abdul AzizPas encore d'évaluation
- ClutchDocument24 pagesClutchJayson B. Cadelina100% (1)
- Mercedes Benz Actros, Atego, Axor Truck Fault Codes List Part 4Document7 pagesMercedes Benz Actros, Atego, Axor Truck Fault Codes List Part 4Mohamed Emam91% (35)
- FWD 6 Speed: Ganzeboom Transmission Parts & Torque ConvertersDocument2 pagesFWD 6 Speed: Ganzeboom Transmission Parts & Torque ConvertersAlli YantiPas encore d'évaluation
- Eee 1Document23 pagesEee 1Dany LutzPas encore d'évaluation
- 2008 Harley Davidson Night Rod 28Document137 pages2008 Harley Davidson Night Rod 28Roberto GonzalezPas encore d'évaluation
- 4valve Engine Order Sheet NC250 Parts CatalogDocument4 pages4valve Engine Order Sheet NC250 Parts Catalogsl_474530362100% (1)
- Code of Practive For Safe Use and Operation of Suspended Working PlatformDocument62 pagesCode of Practive For Safe Use and Operation of Suspended Working PlatformthowchinPas encore d'évaluation
- DifferentialsDocument48 pagesDifferentialsEngine Tuning UpPas encore d'évaluation
- Allis Chalmers I40 I400 Tractor Parts CatalogDocument20 pagesAllis Chalmers I40 I400 Tractor Parts Catalogjames100% (45)
- TM 5-2420-222-20-1 John Deere JD 410 Backhoe LoaderDocument507 pagesTM 5-2420-222-20-1 John Deere JD 410 Backhoe LoaderAdvocate76% (17)
- To U660e-U760e VBLDocument1 pageTo U660e-U760e VBLdomingo.toyota60gmail.comPas encore d'évaluation
- 600 KN Towing Winch ManualDocument173 pages600 KN Towing Winch ManualMartellusPas encore d'évaluation
- Assignment - 1: MEN303 Design of Mechanical Systems Submission Date: 28-06-2018Document2 pagesAssignment - 1: MEN303 Design of Mechanical Systems Submission Date: 28-06-2018Amit KapoorPas encore d'évaluation
- CatepillarDocument20 pagesCatepillartehbiroPas encore d'évaluation
- Steering GeometryDocument4 pagesSteering GeometryAnanya BhardwajPas encore d'évaluation
- Maruti Zen MaintenanceDocument3 pagesMaruti Zen MaintenanceSandeep AlvaPas encore d'évaluation
- CRF230F ServiceManual 2003-2013Document304 pagesCRF230F ServiceManual 2003-2013Ariel MuñozPas encore d'évaluation
- TATA 407 SpecificationDocument10 pagesTATA 407 Specificationbaisankit100% (2)
- 16x16 Sle Transmisson 40 SeriesDocument88 pages16x16 Sle Transmisson 40 SeriesscallybrandonPas encore d'évaluation
- Dominar 400 Abs & Non Abs Bsiv - SPCDocument87 pagesDominar 400 Abs & Non Abs Bsiv - SPCAroldo RuizPas encore d'évaluation
- CB Unicorn Dazzler 2010Document89 pagesCB Unicorn Dazzler 2010praveenkumarp614Pas encore d'évaluation
- XA400S - XR400S Illustrated Parts Catalog - MASTERDocument531 pagesXA400S - XR400S Illustrated Parts Catalog - MASTERCorrado Sirianni100% (4)
- 007 Operation&Safety CabinDocument33 pages007 Operation&Safety CabinJose Carmona100% (1)
- Aisin Automatic Transaxle PDFDocument234 pagesAisin Automatic Transaxle PDFAdal VeraPas encore d'évaluation