Vous aimerez peut-être aussi
- Deal With The Function of The Pressure Control Valves in Hydraulic Power SystemsDocument6 pagesDeal With The Function of The Pressure Control Valves in Hydraulic Power Systems666667Pas encore d'évaluation
- Hydraulic Schematic SymbolsDocument12 pagesHydraulic Schematic SymbolsswainpiyushPas encore d'évaluation
- Directional Control Valves ExplainedDocument48 pagesDirectional Control Valves ExplainedMohamed ZahranPas encore d'évaluation
- DCVDocument35 pagesDCVTanoj Patro100% (1)
- SpeDocument12 pagesSpeseaqu3stPas encore d'évaluation
- Hydrostatic drive system components and functionsDocument27 pagesHydrostatic drive system components and functionsGiancarlo Olivera Bejar100% (3)
- Unit 24: Applications of Pneumatics and HydraulicsDocument15 pagesUnit 24: Applications of Pneumatics and HydraulicsEmad ElsaidPas encore d'évaluation
- Service Instructions: Oilgear Type "PVV 540" Open Loop PumpsDocument14 pagesService Instructions: Oilgear Type "PVV 540" Open Loop PumpsAxel LetonaPas encore d'évaluation
- Pneumatic Symbols GuideDocument3 pagesPneumatic Symbols Guidevishnunair27Pas encore d'évaluation
- Flow Control ValvesDocument24 pagesFlow Control Valvesmk_chandru100% (1)
- SPRAGUE J Pump BrochureDocument8 pagesSPRAGUE J Pump BrochurechauduonguyenPas encore d'évaluation
- Present ValvesDocument27 pagesPresent ValvesAbhishek ChoudharyPas encore d'évaluation
- Unbalanced Vane Pump Design ExplainedDocument5 pagesUnbalanced Vane Pump Design ExplainedRaghu KrishnanPas encore d'évaluation
- Hydraulic Basics Knowledge - Forms, Theory, ComponentsDocument72 pagesHydraulic Basics Knowledge - Forms, Theory, ComponentsVanHieu Luyen100% (1)
- Proportional Reducing ValveDocument8 pagesProportional Reducing ValvediabalziabPas encore d'évaluation
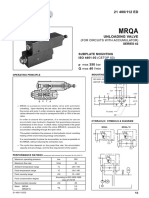
- Accumulator Unloading Valve, Type MRQADocument2 pagesAccumulator Unloading Valve, Type MRQALibinPas encore d'évaluation
- Hydraulic SystemsDocument42 pagesHydraulic SystemsGauthamPas encore d'évaluation
- MC Pump and Valve Training 11-10-17Document34 pagesMC Pump and Valve Training 11-10-17Jesus N Rodriguez100% (1)
- Using The 8T-2700 Blowby/Air Flow Indicator (0774, 0781, 0785)Document34 pagesUsing The 8T-2700 Blowby/Air Flow Indicator (0774, 0781, 0785)Jorge Luis Cervantes Carrillo100% (1)
- Neutral Position in DCVDocument6 pagesNeutral Position in DCVAimee SpearsPas encore d'évaluation
- External Gear Pumps Technical SpecificationsDocument4 pagesExternal Gear Pumps Technical SpecificationsAnton Feny SaputraPas encore d'évaluation
- Feedbacks in Hydraulic Servo Systems RydbergDocument21 pagesFeedbacks in Hydraulic Servo Systems Rydbergc1ronPas encore d'évaluation
- Fast Forw Ard, Manual Op Manual Op - Feed ValveDocument3 pagesFast Forw Ard, Manual Op Manual Op - Feed ValveA Ramos GabyPas encore d'évaluation
- Diagnostico Freios Abs MK Ii PDFDocument17 pagesDiagnostico Freios Abs MK Ii PDFtadeuPas encore d'évaluation
- HPS Notes of Lecture PDFDocument63 pagesHPS Notes of Lecture PDFsbhalesh100% (2)
- Shuttle Valves: Catalog HY15-3502/USDocument17 pagesShuttle Valves: Catalog HY15-3502/USPartsGopher.comPas encore d'évaluation
- Electro Hydraulic Servo ValveDocument8 pagesElectro Hydraulic Servo ValveabyzenPas encore d'évaluation
- Salami Catalog Group3 Zupcaste PumpeDocument32 pagesSalami Catalog Group3 Zupcaste Pumpeado_22Pas encore d'évaluation
- Dinison High Flow Seat Valve - Ver 7-En 5060-ADocument26 pagesDinison High Flow Seat Valve - Ver 7-En 5060-AKlaus Høj HenriksenPas encore d'évaluation
- Directional Control Valves GuideDocument193 pagesDirectional Control Valves GuidephaindikaPas encore d'évaluation
- ME4803 Motion Control: The Strengths and Design of Fluid Power SystemsDocument36 pagesME4803 Motion Control: The Strengths and Design of Fluid Power SystemssayproPas encore d'évaluation
- Servo Solenoid ValvesDocument204 pagesServo Solenoid Valveschandushar1604100% (1)
- 3 Handout Pilot-Controls enDocument16 pages3 Handout Pilot-Controls enluis100% (1)
- Scanwill Pressure IntensifierDocument12 pagesScanwill Pressure IntensifierÁlvaro Conti FilhoPas encore d'évaluation
- Industrial Hydraulics - SPSDocument72 pagesIndustrial Hydraulics - SPSPrakash KumarPas encore d'évaluation
- Hydrostatic DriveDocument13 pagesHydrostatic DriveDhanraj PatilPas encore d'évaluation
- WalvoilDocument64 pagesWalvoilSamad A BakarPas encore d'évaluation
- Bucket Hydraulic SystemDocument4 pagesBucket Hydraulic SystemNay SoePas encore d'évaluation
- Pump Control With Variable Frequency Drives - Case Study: Hitachi America, Ltd.Document4 pagesPump Control With Variable Frequency Drives - Case Study: Hitachi America, Ltd.Hitachi America, Ltd., Industrial Components and Equipment DivisionPas encore d'évaluation
- Pressure Sequence ValvesDocument3 pagesPressure Sequence ValvesJegan SJ100% (1)
- Aircraft Hydraulic System 58a22e86ebd79Document23 pagesAircraft Hydraulic System 58a22e86ebd79Hein SoePas encore d'évaluation
- Bacis Pneumatic Hydraulic SymbolsDocument7 pagesBacis Pneumatic Hydraulic Symbolsmailmohith2322Pas encore d'évaluation
- Installation Maintenance CalzoniDocument75 pagesInstallation Maintenance Calzonimobydick230% (1)
- Hydraulic Brake Systems and Components For Off-Highway Vehicles and EquipmentDocument10 pagesHydraulic Brake Systems and Components For Off-Highway Vehicles and EquipmentJenner Volnney Quispe ChataPas encore d'évaluation
- M4 Spool Replacement PDFDocument11 pagesM4 Spool Replacement PDFMira RedaPas encore d'évaluation
- High Precision Position Control of Electro-Hydraulic Servo SystemDocument10 pagesHigh Precision Position Control of Electro-Hydraulic Servo Systemamin342Pas encore d'évaluation
- Closed Loop Control Systems ExplainedDocument33 pagesClosed Loop Control Systems ExplainedSgsksbskxvxk100% (1)
- PGP030 031 SeriesDocument28 pagesPGP030 031 SeriesWesame ShnodaPas encore d'évaluation
- Hydraulic System:-: Chapter-2 Hydraulic, Pneumatic and Electrical Telemetry SystemsDocument7 pagesHydraulic System:-: Chapter-2 Hydraulic, Pneumatic and Electrical Telemetry SystemsMayur ParmarPas encore d'évaluation
- M318S-Steering PumpDocument88 pagesM318S-Steering Pumpzeck28Pas encore d'évaluation
- Group 3 Pilot Circuit: RCV Pedal Remote Control Valve (LH Lever) Remote Control Valve (RH Lever)Document8 pagesGroup 3 Pilot Circuit: RCV Pedal Remote Control Valve (LH Lever) Remote Control Valve (RH Lever)thierrylindoPas encore d'évaluation
- Orbitrol StuureenhedenDocument98 pagesOrbitrol Stuureenhedenkaoblekstena100% (1)
- H-Series Motor Grader Hydraulic System TrainingDocument39 pagesH-Series Motor Grader Hydraulic System TrainingVictorDjChiqueCastilloPas encore d'évaluation
- Load SensingDocument27 pagesLoad SensingRobert Gordon100% (6)
- Pressure Control ValveDocument53 pagesPressure Control ValveRaghu Bhat100% (1)
- Pressure-Control Valves PDFDocument15 pagesPressure-Control Valves PDFRagab Abulmagd100% (1)
- RLD - MMM - Expansion Compression Tanks Hydronic Systems Maximum Tank PressureDocument5 pagesRLD - MMM - Expansion Compression Tanks Hydronic Systems Maximum Tank PressureHyeong-Ho KimPas encore d'évaluation
- LS Control Saves PowerDocument4 pagesLS Control Saves PowerpalanimechPas encore d'évaluation
- Load Sensing Pump ControlDocument4 pagesLoad Sensing Pump ControlNachiketPas encore d'évaluation
- How VFD Speed Affects Centrifugal Pump HydraulicsDocument6 pagesHow VFD Speed Affects Centrifugal Pump HydraulicsAudrey Patrick KallaPas encore d'évaluation
- 9 PDFDocument2 pages9 PDFMahmmod Al-QawasmehPas encore d'évaluation
- Caterpillar 631/637G Wheel Tractor-Scrapers New ReleaseDocument39 pagesCaterpillar 631/637G Wheel Tractor-Scrapers New ReleaseMahmmod Al-Qawasmeh100% (1)
- View Latest Kit Information: Entire GroupDocument1 pageView Latest Kit Information: Entire GroupMahmmod Al-QawasmehPas encore d'évaluation
- Electrohydraulics Basic LevelDocument202 pagesElectrohydraulics Basic LevelSavio Fernandes100% (9)
- CAT Machine Care 02Document14 pagesCAT Machine Care 02Mahmmod Al-QawasmehPas encore d'évaluation
- Caterpillar EMCPDocument40 pagesCaterpillar EMCPrealwild93% (59)
- Cat 621G 623G 627G NpiDocument51 pagesCat 621G 623G 627G NpiMahmmod Al-QawasmehPas encore d'évaluation
- Pilot System Training for 320B/330B Hydraulic ExcavatorsDocument10 pagesPilot System Training for 320B/330B Hydraulic ExcavatorsImam Java92% (38)
- Electrohydraulics Basic LevelDocument202 pagesElectrohydraulics Basic LevelSavio Fernandes100% (9)
- 950h mxl00417Document13 pages950h mxl00417Mahmmod Al-Qawasmeh100% (1)
- CAT 631E 637E Test ProcedureDocument16 pagesCAT 631E 637E Test ProcedureMahmmod Al-QawasmehPas encore d'évaluation
- Bosch Rexroth Training PDFDocument19 pagesBosch Rexroth Training PDFMahmmod Al-QawasmehPas encore d'évaluation
- Row Crop Challenger SpecsDocument88 pagesRow Crop Challenger SpecsMahmmod Al-Qawasmeh100% (1)
- 0315 SWLDocument2 pages0315 SWLMahmmod Al-QawasmehPas encore d'évaluation
- Delivery Checklist RecordDocument2 pagesDelivery Checklist RecordMahmmod Al-Qawasmeh100% (1)
- CB-534D Propulsion System: Component Identification and OperationDocument19 pagesCB-534D Propulsion System: Component Identification and OperationMahmmod Al-Qawasmeh100% (1)
- 950h RemoveDocument2 pages950h RemoveMahmmod Al-QawasmehPas encore d'évaluation
- 05 CB534D Machine Systems Tech InstDocument23 pages05 CB534D Machine Systems Tech InstMahmmod Al-QawasmehPas encore d'évaluation
- Important Safety InformationDocument3 pagesImportant Safety InformationMahmmod Al-QawasmehPas encore d'évaluation
- CB-534D Vibratory Compactors Vibratory SystemDocument20 pagesCB-534D Vibratory Compactors Vibratory SystemMahmmod Al-QawasmehPas encore d'évaluation
- Cat Cb434c 534c 634c ST MatDocument43 pagesCat Cb434c 534c 634c ST MatMahmmod Al-Qawasmeh100% (2)
- Row Crop Challenger Specs SLDDocument42 pagesRow Crop Challenger Specs SLDMahmmod Al-QawasmehPas encore d'évaluation
- 09 Cat BHL B&C Hydsys3Document15 pages09 Cat BHL B&C Hydsys3Mahmmod Al-QawasmehPas encore d'évaluation
- 03 Cat BHL B&C ElectrDocument14 pages03 Cat BHL B&C ElectrMahmmod Al-QawasmehPas encore d'évaluation
- Service Training: Backhoe Loaders All Wheel SteerDocument7 pagesService Training: Backhoe Loaders All Wheel SteerMahmmod Al-QawasmehPas encore d'évaluation
- 10 Cat BHL B&C Appendix IIDocument4 pages10 Cat BHL B&C Appendix IIMahmmod Al-QawasmehPas encore d'évaluation
- Service Training Answers to Student Quizzes on Backhoe Loaders in MalagaDocument14 pagesService Training Answers to Student Quizzes on Backhoe Loaders in MalagaMahmmod Al-QawasmehPas encore d'évaluation
- Service Training: Backhoe Loaders All Wheel SteerDocument7 pagesService Training: Backhoe Loaders All Wheel SteerMahmmod Al-QawasmehPas encore d'évaluation
- Cat D Series Aws BHL - SLDDocument10 pagesCat D Series Aws BHL - SLDMahmmod Al-QawasmehPas encore d'évaluation
- Testing & AdjustingDocument4 pagesTesting & AdjustingMahmmod Al-QawasmehPas encore d'évaluation
- Joystick Control Plumbing - H PatternDocument3 pagesJoystick Control Plumbing - H PatternricardoPas encore d'évaluation
- Murugesan Resume 2021Document5 pagesMurugesan Resume 2021Murugesan .JPas encore d'évaluation
- Compressor Handbook Sec 6 ArielDocument32 pagesCompressor Handbook Sec 6 Arielfrana hadiPas encore d'évaluation
- Climatology-Unit III 3rd SEMDocument14 pagesClimatology-Unit III 3rd SEMflower lilyPas encore d'évaluation
- Rtad Free Cooling CatalogDocument24 pagesRtad Free Cooling CatalogAdedayo AdebimpePas encore d'évaluation
- Diaphragm Control Valve (Fc200-Trim11)Document1 pageDiaphragm Control Valve (Fc200-Trim11)slavaPas encore d'évaluation
- 1900 Series Safety Relief Valve Spec Data Gea20256dDocument100 pages1900 Series Safety Relief Valve Spec Data Gea20256dUmar SaeedPas encore d'évaluation
- Electronic Cooling Using Synthetic Jet ImpingementDocument11 pagesElectronic Cooling Using Synthetic Jet ImpingementEKKACHAI PRABNAKORNPas encore d'évaluation
- GB ENEXIO Sedimentation TechnologyDocument20 pagesGB ENEXIO Sedimentation TechnologyPhạm BắcPas encore d'évaluation
- Chapter 5 Pump and Control Devices PDFDocument68 pagesChapter 5 Pump and Control Devices PDFRana G100% (2)
- CAIRO UNIVERSITY CHEMICAL ENG MOMENTUM TRANSFERDocument2 pagesCAIRO UNIVERSITY CHEMICAL ENG MOMENTUM TRANSFERMohamed TallyPas encore d'évaluation
- Grundfos Design HVACDocument68 pagesGrundfos Design HVACmishraenggPas encore d'évaluation
- The Effect of Lubricant Viscosity-Temperature Characteristics On The Performance of Plain Journal BearingsDocument2 pagesThe Effect of Lubricant Viscosity-Temperature Characteristics On The Performance of Plain Journal BearingsAnibal RiosPas encore d'évaluation
- Problem Sheet 1 PDFDocument4 pagesProblem Sheet 1 PDFJeff HardyPas encore d'évaluation
- Clarifier process datasheetDocument1 pageClarifier process datasheetMuhammad GhaziPas encore d'évaluation
- Chem HW 3Document16 pagesChem HW 3leldridge09Pas encore d'évaluation
- Artificial Lift System Applications in Tight Formations: The State of KnowledgeDocument14 pagesArtificial Lift System Applications in Tight Formations: The State of Knowledgeimam zulkipliPas encore d'évaluation
- Arab Oil Naturalgas - Com Crude Oil Storage TanksDocument3 pagesArab Oil Naturalgas - Com Crude Oil Storage TanksWael_Barakat_31790% (1)
- Fabrication of Shell and Tube Heat Exchanger To Cool Hydraulic OilDocument30 pagesFabrication of Shell and Tube Heat Exchanger To Cool Hydraulic OilDeepthi Swaroobini100% (1)
- VISCOUS PIPE FLOWDocument34 pagesVISCOUS PIPE FLOWShinee JayasilanPas encore d'évaluation
- LPG Pipe SizingDocument2 pagesLPG Pipe Sizingimtiyaz94Pas encore d'évaluation
- DST Course NiocDocument37 pagesDST Course NiocOmid ShahbaziPas encore d'évaluation
- Valve Tanks AquatrolDocument26 pagesValve Tanks AquatrolJohn CenaPas encore d'évaluation
- Tutorials QuestionsDocument3 pagesTutorials Questionskarri100% (1)
- Surface Tension MeasurementsDocument7 pagesSurface Tension MeasurementsXena Jenn Y. BacsarpaPas encore d'évaluation
- SW FS 2021-Technical ReferenceDocument160 pagesSW FS 2021-Technical Reference28Pas encore d'évaluation
- Experiment No. 3 Flow Over Broad Crested Weir: 3.1 GeneralDocument6 pagesExperiment No. 3 Flow Over Broad Crested Weir: 3.1 GeneralAlamin HosainPas encore d'évaluation
- Chemical Kinetics Rate EquationsDocument5 pagesChemical Kinetics Rate EquationsShreePas encore d'évaluation
- Highrise BLDG Drainage Stack Velocity PDFDocument6 pagesHighrise BLDG Drainage Stack Velocity PDFPatel KalingaPas encore d'évaluation
- KSFL ReportDocument56 pagesKSFL ReportAbhishek KumarPas encore d'évaluation