Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Computer Engineering (Ai)Document244 pagesComputer Engineering (Ai)arun kumarPas encore d'évaluation
- 1 DecDocument10 pages1 Decarun kumarPas encore d'évaluation
- D1-22683 Aam Tyan 2023-24 SMDDocument6 pagesD1-22683 Aam Tyan 2023-24 SMDarun kumarPas encore d'évaluation
- October 2023 Machine Learning Aim-405Document3 pagesOctober 2023 Machine Learning Aim-405arun kumarPas encore d'évaluation
- 1 MarDocument10 pages1 Mararun kumarPas encore d'évaluation
- State Board of Technical Education & Training Ap:: MangalagiriDocument10 pagesState Board of Technical Education & Training Ap:: Mangalagiriarun kumarPas encore d'évaluation
- C23 - Lab Rubrics - 2023-24Document19 pagesC23 - Lab Rubrics - 2023-24arun kumarPas encore d'évaluation
- A1Document2 pagesA1arun kumarPas encore d'évaluation
- LR Intimating Lab RubricsDocument1 pageLR Intimating Lab Rubricsarun kumarPas encore d'évaluation
- Microelectronic Technology For MEMS: Unit - 2Document179 pagesMicroelectronic Technology For MEMS: Unit - 2arun kumarPas encore d'évaluation
- Matlab Programmming Previous PapersDocument4 pagesMatlab Programmming Previous Papersarun kumarPas encore d'évaluation
- Annual Sports Day Report 2018-2019: Department of Physical Education & SportsDocument1 pageAnnual Sports Day Report 2018-2019: Department of Physical Education & Sportsarun kumarPas encore d'évaluation
- Electrical, Electronics and InstrumentationDocument2 pagesElectrical, Electronics and Instrumentationarun kumarPas encore d'évaluation
- Interaction Slot - 21 June 2020Document10 pagesInteraction Slot - 21 June 2020arun kumarPas encore d'évaluation
- Interaction Slot - 20 June 2020Document10 pagesInteraction Slot - 20 June 2020arun kumarPas encore d'évaluation
- B.Tech Supple Notifications 2Document5 pagesB.Tech Supple Notifications 2arun kumarPas encore d'évaluation
- DSP Lab ModrobsDocument2 pagesDSP Lab Modrobsarun kumar0% (1)
- Answers To Tutorial 1Document1 pageAnswers To Tutorial 1arun kumarPas encore d'évaluation
- Laboratories 1 - 4 For The TMS320C5416 DSKDocument9 pagesLaboratories 1 - 4 For The TMS320C5416 DSKarun kumarPas encore d'évaluation
- Amma HD, Sai, PCN TV: NO:19, R.S.Road, Andra Bank Upstairs Kondasamuthiram, Gudiyatham Cell: 9003858500,9362640285Document1 pageAmma HD, Sai, PCN TV: NO:19, R.S.Road, Andra Bank Upstairs Kondasamuthiram, Gudiyatham Cell: 9003858500,9362640285arun kumarPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Strategic Planning ModelDocument55 pagesStrategic Planning ModelShamkant KomarpantPas encore d'évaluation
- Community Health Nursing Course DescriptionDocument1 pageCommunity Health Nursing Course DescriptionMiegan BaluyotPas encore d'évaluation
- CV Europass 20190114 LucianConstantin enDocument2 pagesCV Europass 20190114 LucianConstantin enLucian DumitrachePas encore d'évaluation
- Holliday - Native SpeakerismDocument3 pagesHolliday - Native SpeakerismDánisaGarderesPas encore d'évaluation
- COT 2 Reading and Writing Q4Document4 pagesCOT 2 Reading and Writing Q4Romy Sales Grande Jr.Pas encore d'évaluation
- PIT Error Overview - ParetoDocument208 pagesPIT Error Overview - ParetoHariharan Yelomalei50% (2)
- Gerflor Card Taralay Impression Uni en - PDF - 348 - EnrichDocument12 pagesGerflor Card Taralay Impression Uni en - PDF - 348 - EnrichMartinPas encore d'évaluation
- Recruitment and Selection Process in Bangladesh Civil ServiceDocument9 pagesRecruitment and Selection Process in Bangladesh Civil ServiceAllen AlfredPas encore d'évaluation
- CV - Nhan - EnglishDocument4 pagesCV - Nhan - EnglishnhanpcPas encore d'évaluation
- 2nd Year English Send Up 22Document2 pages2nd Year English Send Up 22Keats 28Pas encore d'évaluation
- Aunty Maria': Come Home For A Coffee: Teaching NoteDocument4 pagesAunty Maria': Come Home For A Coffee: Teaching NoteAditya DesaiPas encore d'évaluation
- Circular QueueDocument10 pagesCircular QueuesalembalkiPas encore d'évaluation
- Olympic Message SystemDocument16 pagesOlympic Message Systemtrevor randyPas encore d'évaluation
- Loads Dead Loads Imposed Loads Floor Roof Determining Load Per M and m2 WindDocument58 pagesLoads Dead Loads Imposed Loads Floor Roof Determining Load Per M and m2 Windwaheedopple3998Pas encore d'évaluation
- General Manager - Mining / Oil & Gas (Expat)Document4 pagesGeneral Manager - Mining / Oil & Gas (Expat)RajaSyakistPas encore d'évaluation
- ISO Guide 35 Statistical Procedures For Reference MaterialsDocument38 pagesISO Guide 35 Statistical Procedures For Reference MaterialsAlberto Núñez Cardezo50% (2)
- Quiz1 ISDS361BDocument4 pagesQuiz1 ISDS361BAnh PhamPas encore d'évaluation
- Stating The Obvious PDFDocument10 pagesStating The Obvious PDFGlenn E. DicenPas encore d'évaluation
- Heavy Lifting Risk AssessmentsDocument9 pagesHeavy Lifting Risk AssessmentsSayed Darwish100% (6)
- Water Treatment PDFDocument87 pagesWater Treatment PDFJubin KumarPas encore d'évaluation
- Name: Course/year:: Micro Asia College of Science and TechnologyDocument3 pagesName: Course/year:: Micro Asia College of Science and TechnologyTrisTan DolojanPas encore d'évaluation
- Developmental Model of Intercultural Sensitivity (Oral Com Quiz)Document1 pageDevelopmental Model of Intercultural Sensitivity (Oral Com Quiz)Hero DiasPas encore d'évaluation
- Group 4 - Reference and SenseDocument24 pagesGroup 4 - Reference and SenseMachsunaPas encore d'évaluation
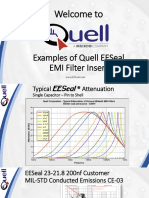
- Examples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsDocument15 pagesExamples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsXto PeregrinPas encore d'évaluation
- Planning For Big Data PDFDocument88 pagesPlanning For Big Data PDFexelius100% (1)
- Tableau VM Tuning and Best PracticesDocument6 pagesTableau VM Tuning and Best Practicessrikanth_4allPas encore d'évaluation
- Beekman - Tomorrow's Technology and You 9eDocument89 pagesBeekman - Tomorrow's Technology and You 9eJimmy DrakePas encore d'évaluation
- Mom MF-1Document79 pagesMom MF-1AnbuPas encore d'évaluation
- TPS - Quick AssessmentDocument2 pagesTPS - Quick AssessmentcssIllinois100% (1)
- 36-217 Fall 2013 HW04Document2 pages36-217 Fall 2013 HW04Gabriel Bernard MullenPas encore d'évaluation