Vous aimerez peut-être aussi
- Exercícios Carta CapabilidadeDocument3 pagesExercícios Carta CapabilidadeThalesPas encore d'évaluation
- Models ATPDocument114 pagesModels ATPThales67% (3)
- ATPDraw: software para análise de redes elétricasDocument147 pagesATPDraw: software para análise de redes elétricasAlfredo Lopez Cordova0% (1)
- Curva característica do transistor bipolar de junçãoDocument14 pagesCurva característica do transistor bipolar de junçãoCDDSAPas encore d'évaluation
- 05-Fix 2 2 BimDocument1 page05-Fix 2 2 BimThalesPas encore d'évaluation
- Gerador SíncronoDocument1 pageGerador SíncronoThalesPas encore d'évaluation
- Introdução A Centrais HidrelétricasDocument80 pagesIntrodução A Centrais HidrelétricasThalesPas encore d'évaluation
- Introdução A Turbinas HidráulicasDocument68 pagesIntrodução A Turbinas HidráulicasThalesPas encore d'évaluation
- As 10 maiores usinas hidrelétricas do BrasilDocument1 pageAs 10 maiores usinas hidrelétricas do BrasilThalesPas encore d'évaluation
- 02 - MI Testes Eletricos Materiais IsolantesDocument2 pages02 - MI Testes Eletricos Materiais IsolantesThalesPas encore d'évaluation
- Usina Hidrelétrica de Itumbiara: História, Sistema e EquipamentosDocument22 pagesUsina Hidrelétrica de Itumbiara: História, Sistema e EquipamentosThalesPas encore d'évaluation
- 12 - Introdução A Projetos ElétricosDocument73 pages12 - Introdução A Projetos ElétricosThalesPas encore d'évaluation
- 01Document5 pages01ThalesPas encore d'évaluation
- Cap2 - Métodos de Solução 2011Document33 pagesCap2 - Métodos de Solução 2011ThalesPas encore d'évaluation
- Aula 01 - TelefoniaDocument56 pagesAula 01 - TelefoniaTiago SchuarzPas encore d'évaluation
- Minicurso Sssac Sbse 2014Document114 pagesMinicurso Sssac Sbse 2014ThalesPas encore d'évaluation
- Din1-03-Capt1-A Estabilidade Dos Sistemas ElétricosDocument32 pagesDin1-03-Capt1-A Estabilidade Dos Sistemas ElétricosThalesPas encore d'évaluation
- FEN 4 3521 Palestra SPDA At-BT 2010 2Document45 pagesFEN 4 3521 Palestra SPDA At-BT 2010 2Wilson Francisco HeckPas encore d'évaluation
- BL 09 - Ementa-MicrocontroladoresDocument1 pageBL 09 - Ementa-MicrocontroladoresThalesPas encore d'évaluation
- Conversao de Energia - 61405Document11 pagesConversao de Energia - 61405Fal JuniorPas encore d'évaluation
- Introducao Aos Sistemas EstruturadosDocument34 pagesIntroducao Aos Sistemas EstruturadosThalesPas encore d'évaluation
- Apostila Acionamentos Eletricos 2008 NeemiasDocument56 pagesApostila Acionamentos Eletricos 2008 Neemiasrodrigo_0909Pas encore d'évaluation
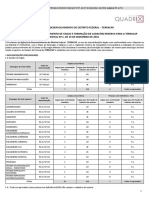
- Edital Terracap DFDocument42 pagesEdital Terracap DFmackPas encore d'évaluation
- TCC2 2014 1 Roberta FinalDocument52 pagesTCC2 2014 1 Roberta FinalThalesPas encore d'évaluation
- Formulario de Proposta de PeDDocument9 pagesFormulario de Proposta de PeDThalesPas encore d'évaluation
- Passo A Passo Solicitacao Identidade AcademicaDocument2 pagesPasso A Passo Solicitacao Identidade AcademicawinzeraPas encore d'évaluation
- Bisturi Wem Manual OperaçãoDocument39 pagesBisturi Wem Manual Operaçãorenatozim71% (7)
- Exercícios Resistencia e Resistividade.Document6 pagesExercícios Resistencia e Resistividade.Gabriel ZancanellaPas encore d'évaluation
- Circuitos TrifásicosDocument39 pagesCircuitos TrifásicosRanon Nunes100% (1)
- Manual 2103A 002Document23 pagesManual 2103A 002psmorais51Pas encore d'évaluation
- Smashweld 316Document68 pagesSmashweld 316Williams CuvierPas encore d'évaluation
- Investigação Da Modelagem Do Eletrolisador PEM Domínio Elétrico, Eficiência eDocument29 pagesInvestigação Da Modelagem Do Eletrolisador PEM Domínio Elétrico, Eficiência eJaspion SkyPas encore d'évaluation
- 3 - Amplificadores Operacionais v2.0Document44 pages3 - Amplificadores Operacionais v2.0carlos augusto do carmo braiaPas encore d'évaluation
- Manutenção central triflex 2TDocument20 pagesManutenção central triflex 2TSuporte Aliança NatalPas encore d'évaluation
- Diagrama de Sequencia Zero de TransformadoresDocument8 pagesDiagrama de Sequencia Zero de TransformadoresRafael Lima ConradoPas encore d'évaluation
- Corrente Contínua e AlternadaDocument4 pagesCorrente Contínua e AlternadaAugusto RodriguesPas encore d'évaluation
- Fenómenos TransitóriosDocument6 pagesFenómenos TransitóriosDenilson Adelino CossaPas encore d'évaluation
- Relés - Classificação Quanto À FunçãoDocument2 pagesRelés - Classificação Quanto À FunçãoEzequielRibas100% (1)
- Sensor LDRDocument4 pagesSensor LDRAlan Borges Da SilvaPas encore d'évaluation
- Fonte de Alimentação PC Atx 200WDocument6 pagesFonte de Alimentação PC Atx 200WFrancisco PereiraPas encore d'évaluation
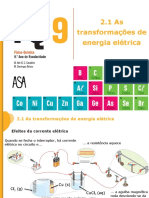
- As Transformações Da Energia ElétricaDocument10 pagesAs Transformações Da Energia ElétricaSara FrancoPas encore d'évaluation
- Mecânica - Manual Técnico Operação Chiller DAIKIN PDFDocument78 pagesMecânica - Manual Técnico Operação Chiller DAIKIN PDFRouberioRolim100% (2)
- Aula 02 - Diagrama Unifilar e PuDocument34 pagesAula 02 - Diagrama Unifilar e PuJoão Paulo LimaPas encore d'évaluation
- Comandos ElétricosDocument23 pagesComandos ElétricosJulio FerreiraPas encore d'évaluation
- Circuitos Elétricos 1Document4 pagesCircuitos Elétricos 1Otoni Nóbrega NetoPas encore d'évaluation
- Capacitores e Indutores em CircuitosDocument45 pagesCapacitores e Indutores em CircuitosThiago S. LacerdaPas encore d'évaluation
- Duosida-CarregadorCA (002) - Versão Atualizada Estoque Versao WEBDocument22 pagesDuosida-CarregadorCA (002) - Versão Atualizada Estoque Versao WEBEricaPas encore d'évaluation
- Projeto de rede de distribuição - cálculo mecânicoDocument52 pagesProjeto de rede de distribuição - cálculo mecânicoCarlos Renato BarrosPas encore d'évaluation
- TALKING ELECTRONICS 555 - 3de3Document12 pagesTALKING ELECTRONICS 555 - 3de3BapePas encore d'évaluation
- Catalogo ELO.2180Document2 pagesCatalogo ELO.2180Andrey Melo CRPas encore d'évaluation
- Pai Acs580 Catalogo PT 3aua0000145061 PT AltaDocument32 pagesPai Acs580 Catalogo PT 3aua0000145061 PT AltaWandesson DuartePas encore d'évaluation
- F Sica LEIS DE KIRCHHOFF Rodrigo 220919 232649Document3 pagesF Sica LEIS DE KIRCHHOFF Rodrigo 220919 232649André OliveiraPas encore d'évaluation
- Revisão para Prova: Disjuntores e esquemas de aterramentoDocument8 pagesRevisão para Prova: Disjuntores e esquemas de aterramentoMatheus OliveiraPas encore d'évaluation
- Fonte Regulada Com TransistorDocument6 pagesFonte Regulada Com Transistorcleiton_ctba100% (1)
- Circuito de Iluminação com Interrupção SimplesDocument59 pagesCircuito de Iluminação com Interrupção SimplesErnesto Armando Sigauque100% (2)