Vous aimerez peut-être aussi
- Ejercicios U6Document9 pagesEjercicios U6J Rodrigo Castro HPas encore d'évaluation
- Guia de Breath of Fire 4Document121 pagesGuia de Breath of Fire 4J Rodrigo Castro H92% (12)
- Ensayo de RefrigeracionDocument1 pageEnsayo de RefrigeracionJ Rodrigo Castro HPas encore d'évaluation
- Documentos YakultDocument14 pagesDocumentos YakultAirisu GarduñoPas encore d'évaluation
- Dibujo IndustrialDocument59 pagesDibujo IndustrialJ Rodrigo Castro HPas encore d'évaluation
- Escala en Dibujo TecnicoDocument15 pagesEscala en Dibujo TecnicoJ Rodrigo Castro HPas encore d'évaluation
- Cojinetes y RodamientosDocument23 pagesCojinetes y RodamientosJ Rodrigo Castro H100% (1)
- Bombas de Desplazamiento PositivoDocument21 pagesBombas de Desplazamiento PositivoJ Rodrigo Castro H100% (1)
- Cuestionario de MetrologíaDocument6 pagesCuestionario de MetrologíaJ Rodrigo Castro HPas encore d'évaluation
- Vibraciones UiDocument14 pagesVibraciones UiJ Rodrigo Castro HPas encore d'évaluation
- 3.1 Respuesta en El Tiempo de Sistemas DinámicosDocument12 pages3.1 Respuesta en El Tiempo de Sistemas DinámicosJ Rodrigo Castro HPas encore d'évaluation
- Unidad IV Balanceo de RotoresDocument19 pagesUnidad IV Balanceo de RotoresJ Rodrigo Castro HPas encore d'évaluation
- Estructura de Los Compuestos OrganicosDocument18 pagesEstructura de Los Compuestos OrganicosJ Rodrigo Castro H100% (2)
- Presentacion de Diseño Asistido Por Computadora (Unidad 2)Document4 pagesPresentacion de Diseño Asistido Por Computadora (Unidad 2)J Rodrigo Castro HPas encore d'évaluation
- Ejercicios EES Refrigeracion (Unidad 2)Document4 pagesEjercicios EES Refrigeracion (Unidad 2)J Rodrigo Castro HPas encore d'évaluation
- Ejercicios Con FuncionesDocument1 pageEjercicios Con FuncionesJ Rodrigo Castro HPas encore d'évaluation
- Toxicologia y Control AmbientalDocument34 pagesToxicologia y Control AmbientalJ Rodrigo Castro H67% (3)
- Generador Eólico de Energía RenovableDocument10 pagesGenerador Eólico de Energía RenovableJ Rodrigo Castro HPas encore d'évaluation
- Comunicar Las Aspiraciones y La Dirección de La GerenciaDocument2 pagesComunicar Las Aspiraciones y La Dirección de La Gerenciapsm727Pas encore d'évaluation
- Manual de Practicas PLC PDFDocument34 pagesManual de Practicas PLC PDFEmmanuel Ber SPas encore d'évaluation
- Manejo de La Camara FotoDocument4 pagesManejo de La Camara FotogreenemePas encore d'évaluation
- Examen 1 Escenario 2 Herramientas Logica ComputacionalDocument5 pagesExamen 1 Escenario 2 Herramientas Logica ComputacionalErick Salamanca100% (1)
- Diferencia Entre Meta y ObjetivoDocument2 pagesDiferencia Entre Meta y ObjetivoAdrian Jaime ZamudioPas encore d'évaluation
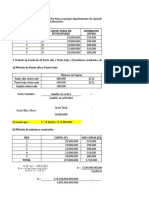
- Metodo Punto Alto y BajoDocument5 pagesMetodo Punto Alto y BajoSaray Moran100% (1)
- Respuestas Web Examen BibliotecaDocument8 pagesRespuestas Web Examen BibliotecaMichel de MontaignePas encore d'évaluation
- Maual de Recepción de DonativosDocument5 pagesMaual de Recepción de DonativosEmilioCamargoPas encore d'évaluation
- Caja Negra (Psicología) - Wikipedia, La Enciclopedia Libre PDFDocument4 pagesCaja Negra (Psicología) - Wikipedia, La Enciclopedia Libre PDFrafael ernestoPas encore d'évaluation
- Funciones Asociadas Al Manejo de CadenasDocument8 pagesFunciones Asociadas Al Manejo de CadenasFrancisco JavierPas encore d'évaluation
- Actividad 4 Servicio Al ClienteDocument2 pagesActividad 4 Servicio Al ClienteHENRY VELEZ100% (1)
- Figueroa - Filosofías de Gestión en GyM PDFDocument6 pagesFigueroa - Filosofías de Gestión en GyM PDFCirohj JaramilloPas encore d'évaluation
- Listado de Links .Onion Tor 2015Document311 pagesListado de Links .Onion Tor 2015Max SonicoPas encore d'évaluation
- Guia de Problemas Matematicos y AlgebraicosDocument8 pagesGuia de Problemas Matematicos y AlgebraicosVinicio Contreras CastroPas encore d'évaluation
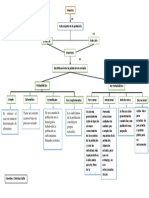
- Mapa Conceptual de ProbabilidadDocument1 pageMapa Conceptual de ProbabilidadCristian CallePas encore d'évaluation
- NTC Iso 14001 LiderazgoDocument9 pagesNTC Iso 14001 LiderazgoJavier SaNzhez GaRciaPas encore d'évaluation
- Tiempo de Ejecución y Eficiencia de AlgoritmosDocument9 pagesTiempo de Ejecución y Eficiencia de AlgoritmosCarlos Francisco Brindis GonzalezPas encore d'évaluation
- Competencias, Capacidades e Indicadores CtaDocument3 pagesCompetencias, Capacidades e Indicadores CtaedmavePas encore d'évaluation
- MK10S1 (1) .En - EsDocument19 pagesMK10S1 (1) .En - EsMarco GuachunPas encore d'évaluation
- CharlaDocument2 pagesCharlaYessy NayoPas encore d'évaluation
- Tarea 6. Latch y FlancosDocument9 pagesTarea 6. Latch y FlancosAngel Osvaldo Richard peñaPas encore d'évaluation
- FsgsfgsDocument5 pagesFsgsfgsCarlos javier bellidoPas encore d'évaluation
- INforme de Medidores de EnergiaDocument6 pagesINforme de Medidores de Energiamoshi3824Pas encore d'évaluation
- Curriculum Moderno Rellenar EcuadorDocument2 pagesCurriculum Moderno Rellenar EcuadorSandroRamirezPas encore d'évaluation
- CV Steve Junnior Covos VillarDocument5 pagesCV Steve Junnior Covos VillarGrupo Agunsa0% (1)
- UF0856Document3 pagesUF0856GASPAR0% (1)
- 20 ProgresionesDocument13 pages20 Progresioneseli2013100% (6)
- Diagrama de BodeDocument11 pagesDiagrama de BodeJean Carlo Andia JimenezPas encore d'évaluation
- DB 1Document13 pagesDB 1enriquePas encore d'évaluation