Vous aimerez peut-être aussi
- Speed Control of Three Phase Induction Motor by Using PLCDocument31 pagesSpeed Control of Three Phase Induction Motor by Using PLCPravat Satpathy100% (2)
- Playstation (Console) : Manufacturer Product Family Type Generation Retail Availability PlaystationDocument22 pagesPlaystation (Console) : Manufacturer Product Family Type Generation Retail Availability Playstationro_venancioPas encore d'évaluation
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionPas encore d'évaluation
- PLC Technical DefinitionDocument6 pagesPLC Technical DefinitionKyle EmersonPas encore d'évaluation
- Programmable Logic ControllerDocument28 pagesProgrammable Logic ControllerMOHAMMED RAHEELPas encore d'évaluation
- TCL Service Manual: L32D2730A/MS08EP-LADocument45 pagesTCL Service Manual: L32D2730A/MS08EP-LAMaria GomezPas encore d'évaluation
- Introducion To PLC and Relay Logic-1Document50 pagesIntroducion To PLC and Relay Logic-1eyoule abdiPas encore d'évaluation
- Project Report Speed Control of Induction MotorDocument47 pagesProject Report Speed Control of Induction MotorSanjivee SachinPas encore d'évaluation
- Ijert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariDocument4 pagesIjert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariAvinash Babu KmPas encore d'évaluation
- Panasonic Plasma FHD TV S & ST Series Technical Guide 2013Document111 pagesPanasonic Plasma FHD TV S & ST Series Technical Guide 2013edsel72100% (3)
- Answers For QuestionnsDocument101 pagesAnswers For QuestionnsfitzgeraldPas encore d'évaluation
- Chapter 7Document55 pagesChapter 7Abo Shaker HaboudalPas encore d'évaluation
- Lecture Notes For Programmable Logic ControllerDocument32 pagesLecture Notes For Programmable Logic ControllerDenny TarembaPas encore d'évaluation
- Advanced Three Phase PWM Inverter ControDocument8 pagesAdvanced Three Phase PWM Inverter Controbehaoszi100% (1)
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionÉvaluation : 5 sur 5 étoiles5/5 (1)
- Project Reprt333Document49 pagesProject Reprt333dhirajsingh_avit83% (6)
- Neural Network Based Speed Control of Induction MotorDocument6 pagesNeural Network Based Speed Control of Induction MotorRohit AswarPas encore d'évaluation
- Convergence 36Document3 pagesConvergence 36Furqan WarisPas encore d'évaluation
- Department of Electronics, M.E.S College Marampally 1Document22 pagesDepartment of Electronics, M.E.S College Marampally 1hariPas encore d'évaluation
- Advanced Three Phase PWM Inverter Control Using MicrocontrollerDocument8 pagesAdvanced Three Phase PWM Inverter Control Using MicrocontrollerAbdur Rehman TayyabPas encore d'évaluation
- Applications of MicrocontrollerDocument12 pagesApplications of MicrocontrollerBabak DanyalPas encore d'évaluation
- Implementation of The Designed Automatic 2748d2f1Document7 pagesImplementation of The Designed Automatic 2748d2f1dhandy juliantoPas encore d'évaluation
- Design and Implementation of PLC-Based Monitoring SystemDocument8 pagesDesign and Implementation of PLC-Based Monitoring SystemAsha Rani C KPas encore d'évaluation
- Auto Phase Switching in A 3 Phase SytemDocument10 pagesAuto Phase Switching in A 3 Phase SytemAnshu HilsaPas encore d'évaluation
- Industrial Automation System: AbstractDocument6 pagesIndustrial Automation System: AbstractEngr Nayyer Nayyab MalikPas encore d'évaluation
- Automatic Phase Selector Fro, Avilable Three Phase With Use of RelaysDocument37 pagesAutomatic Phase Selector Fro, Avilable Three Phase With Use of RelaysDinesh KumarPas encore d'évaluation
- Automatic Monitoring, Controlling and Protecting of 3-Phase I.M. Using MicrocontrollerDocument8 pagesAutomatic Monitoring, Controlling and Protecting of 3-Phase I.M. Using MicrocontrollerHarsh PatelPas encore d'évaluation
- Fault Detection and Protection of Induction Motors Using SensorsDocument5 pagesFault Detection and Protection of Induction Motors Using Sensorsdhirajsingh_avit100% (3)
- Four Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerDocument12 pagesFour Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerpriyaPas encore d'évaluation
- AEM4Document7 pagesAEM4dhaval2430Pas encore d'évaluation
- Presentation On Seminar EnrunDocument33 pagesPresentation On Seminar EnrunElectrical Circuit Globe ECGPas encore d'évaluation
- Microcontroller Based Numerical Relay For Induction Motor ProtectionDocument4 pagesMicrocontroller Based Numerical Relay For Induction Motor ProtectionRama Krishna SamireddyPas encore d'évaluation
- PLC Based Star - Delta Starter For Three Phase Squirrel Cage Induction MotorDocument10 pagesPLC Based Star - Delta Starter For Three Phase Squirrel Cage Induction MotorTana AzeezPas encore d'évaluation
- Design and Implementation of PLC-Based Monitoring and Sequence Controller SystemDocument9 pagesDesign and Implementation of PLC-Based Monitoring and Sequence Controller SystemMohammed SelmanPas encore d'évaluation
- GSM Based Distribution Transformer Monitoring and Controlling System Ijariie1748Document3 pagesGSM Based Distribution Transformer Monitoring and Controlling System Ijariie1748Velu SamyPas encore d'évaluation
- Four - Quadrant Control SystemsDocument4 pagesFour - Quadrant Control SystemsRICHARDPas encore d'évaluation
- Power Theft Detection Via PLC: By, Shashanka B (1RV08EE047) Ravi S Gokavi (1RV08EE041) Chandrashekar C (1RV07EE016)Document23 pagesPower Theft Detection Via PLC: By, Shashanka B (1RV08EE047) Ravi S Gokavi (1RV08EE041) Chandrashekar C (1RV07EE016)2692rimmiPas encore d'évaluation
- New Supervisory Control and Data Acquisition (SCADA) Based Fault Isolation System For Low Voltage Distribution SystemsDocument6 pagesNew Supervisory Control and Data Acquisition (SCADA) Based Fault Isolation System For Low Voltage Distribution SystemsAzhar Fayyaz ParachaPas encore d'évaluation
- EEE 4706 Control System Engineering LabDocument4 pagesEEE 4706 Control System Engineering LabNawshad Uddin Ahmad ChowdhuryPas encore d'évaluation
- Automatic Ic Control of 3 Phase MotorsDocument5 pagesAutomatic Ic Control of 3 Phase Motorsಶ್ರೀಕಾಂತ್ ತಿಪ್ಪೇರುದ್ರಪ್ಪPas encore d'évaluation
- 8 A.) - Various Types of IED SDocument4 pages8 A.) - Various Types of IED SIfiifPas encore d'évaluation
- Microcontrollers (MCU) Are Complete Computer Systems On A Chip. They Combine AnDocument4 pagesMicrocontrollers (MCU) Are Complete Computer Systems On A Chip. They Combine AnSukhveer SinghPas encore d'évaluation
- Assignment 3Document7 pagesAssignment 3nwaytk520Pas encore d'évaluation
- Protection of Induction Motor Using MicrocontrollerDocument5 pagesProtection of Induction Motor Using Microcontrollerkip kipPas encore d'évaluation
- Speed Control of Single Phase Induction Motor Using Infrared Receiver ModuleDocument6 pagesSpeed Control of Single Phase Induction Motor Using Infrared Receiver ModuleSanjay ShelarPas encore d'évaluation
- The Essentials of Automation Applied To Distribution Systems Via PLCs SCADA IEDs and RTUsDocument17 pagesThe Essentials of Automation Applied To Distribution Systems Via PLCs SCADA IEDs and RTUsBruno SamosPas encore d'évaluation
- Microcontroller Based DC Motor Speed Control Using PWM TechniqueDocument5 pagesMicrocontroller Based DC Motor Speed Control Using PWM TechniqueswetaPas encore d'évaluation
- PLC Basics and Voltage Sag Susceptibilities-NEWDocument20 pagesPLC Basics and Voltage Sag Susceptibilities-NEWMouna NjPas encore d'évaluation
- Protection of Three-Phase Induction MotorDocument9 pagesProtection of Three-Phase Induction Motoryisakabera123Pas encore d'évaluation
- Final Report Acs 12Document36 pagesFinal Report Acs 12Abhishek SinghPas encore d'évaluation
- Protection of 3 Phase IM Against Various Abnormal Conditions Ijariie4028 PDFDocument5 pagesProtection of 3 Phase IM Against Various Abnormal Conditions Ijariie4028 PDFGanesh PawarPas encore d'évaluation
- PLC Quick Working ExplainDocument8 pagesPLC Quick Working ExplainMalik SameeullahPas encore d'évaluation
- Programmable Logic ControlDocument136 pagesProgrammable Logic Controljoshbinmollel112Pas encore d'évaluation
- Design and Implementation of PLC-Based Monitoring Control System For Three-Phase Induction Motors Fed by PWM InverterDocument8 pagesDesign and Implementation of PLC-Based Monitoring Control System For Three-Phase Induction Motors Fed by PWM InverterPrajyot KhairkarPas encore d'évaluation
- Automation of Belt Conveyor SystemDocument11 pagesAutomation of Belt Conveyor SystemSummA Learning CenterPas encore d'évaluation
- Induction Motor Protection Using Micro Controller: NtroductionDocument5 pagesInduction Motor Protection Using Micro Controller: Ntroductionwondi BETPas encore d'évaluation
- Role of PLC and SCADA in Power Transmission Control StationDocument26 pagesRole of PLC and SCADA in Power Transmission Control StationabhijitPas encore d'évaluation
- Chapter 4 Industrial AutomationDocument19 pagesChapter 4 Industrial AutomationMelkamu SimenehPas encore d'évaluation
- Three-Phase PWM Rectifier Based On Integrated Power Module and Fixed-Point Digital Signal Processor For Rapid Prototyping IssuesDocument13 pagesThree-Phase PWM Rectifier Based On Integrated Power Module and Fixed-Point Digital Signal Processor For Rapid Prototyping IssuesDenise JenningsPas encore d'évaluation
- Microcontroller Based Low Cost Controlled Rectifiers Training Module For Power Electronics LaboratoryDocument4 pagesMicrocontroller Based Low Cost Controlled Rectifiers Training Module For Power Electronics LaboratoryJubari FikriPas encore d'évaluation
- Programmable Logic Controller (PLC) (جمربملا يقطنملا مكحتملا)Document30 pagesProgrammable Logic Controller (PLC) (جمربملا يقطنملا مكحتملا)Jurf AlnadafPas encore d'évaluation
- PLC Scada ReportDocument50 pagesPLC Scada ReportAbhijeet KumarPas encore d'évaluation
- MSP Buck Regulator Closed LoopDocument4 pagesMSP Buck Regulator Closed LoopMarkoMarkovicPas encore d'évaluation
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorD'EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorPas encore d'évaluation
- Advisers To The Prime Minister: S.No. Name PortfolioDocument1 pageAdvisers To The Prime Minister: S.No. Name PortfoliobasitaleePas encore d'évaluation
- Ecc 29 07 2019Document3 pagesEcc 29 07 2019basitaleePas encore d'évaluation
- China VS India 1 GuardianDocument7 pagesChina VS India 1 GuardianbasitaleePas encore d'évaluation
- Advisers To The Prime Minister: S.No. Name PortfolioDocument1 pageAdvisers To The Prime Minister: S.No. Name PortfoliobasitaleePas encore d'évaluation
- FPSC GR Challan 28 02 2020Document1 pageFPSC GR Challan 28 02 2020arainPas encore d'évaluation
- To Be Published in The Gazette of P Kist A X Raordi AR: I B I I IDocument3 pagesTo Be Published in The Gazette of P Kist A X Raordi AR: I B I I IbasitaleePas encore d'évaluation
- Special Assistants To The Prime Minister: S.No. Name PortfolioDocument1 pageSpecial Assistants To The Prime Minister: S.No. Name PortfoliobasitaleePas encore d'évaluation
- CCoCPEC 13 11 2019Document3 pagesCCoCPEC 13 11 2019basitaleePas encore d'évaluation
- Hadith MCQDDocument1 pageHadith MCQDbasitaleePas encore d'évaluation
- CSS Current Affairs MCQs 2018-19 EditionDocument54 pagesCSS Current Affairs MCQs 2018-19 EditionTahir NabeelPas encore d'évaluation
- List of Ministries / DivisionsDocument2 pagesList of Ministries / DivisionsbasitaleePas encore d'évaluation
- Current Affairs MCQs Ebook January 2019Document28 pagesCurrent Affairs MCQs Ebook January 2019hafiz umar100% (1)
- Current Affairs MCQs Book February 2019 in PDFDocument49 pagesCurrent Affairs MCQs Book February 2019 in PDFShahroz AfzalPas encore d'évaluation
- I.R.-II SubjectiveDocument1 pageI.R.-II SubjectiveKakar ZakirPas encore d'évaluation
- Css Islamiat 2015Document2 pagesCss Islamiat 2015Nouman ButtPas encore d'évaluation
- Events For 1Q2020Document8 pagesEvents For 1Q2020basitaleePas encore d'évaluation
- Applied Maths SubjectiveDocument2 pagesApplied Maths SubjectiveMuhammad Talha MunirPas encore d'évaluation
- I.R. 1 SubjectiveDocument1 pageI.R. 1 SubjectiveAbdullah HussainPas encore d'évaluation
- English (P&C) SubjectiveDocument2 pagesEnglish (P&C) SubjectiveAijaz AhmedPas encore d'évaluation
- GK1 SubjectiveDocument2 pagesGK1 SubjectiveRana M ShakeelPas encore d'évaluation
- Essay CssDocument1 pageEssay Css77chim100% (1)
- General Knowledge-Ii (Current Affairs)Document1 pageGeneral Knowledge-Ii (Current Affairs)Rana M ShakeelPas encore d'évaluation
- Applied Maths SubjectiveDocument2 pagesApplied Maths SubjectiveMuhammad Talha MunirPas encore d'évaluation
- Gover - and P.pol - SubjectiveDocument1 pageGover - and P.pol - SubjectiveFaizan LiaquatPas encore d'évaluation
- CH-9 4Document42 pagesCH-9 4basitaleePas encore d'évaluation
- Hydrogen Iodide EquilibriumDocument2 pagesHydrogen Iodide EquilibriumbasitaleePas encore d'évaluation
- CH-9 4Document42 pagesCH-9 4basitaleePas encore d'évaluation
- CH 7 Solution & ElectrolytesDocument57 pagesCH 7 Solution & ElectrolytesbasitaleePas encore d'évaluation
- CH 7 Solution & Electrolytes UpdatedDocument50 pagesCH 7 Solution & Electrolytes UpdatedbasitaleePas encore d'évaluation
- Pakisatn Beyond CrsisDocument3 pagesPakisatn Beyond CrsisCanna IqbalPas encore d'évaluation
- CS7 Dicom Conformance Statement A47FEA01EN02 130828 FixDocument52 pagesCS7 Dicom Conformance Statement A47FEA01EN02 130828 FixKirje Martinez YoPas encore d'évaluation
- CEIBA2 Server Installation GuideDocument7 pagesCEIBA2 Server Installation GuideInet IntelliPas encore d'évaluation
- How To Install TWRP Root Xiaomi Redmi Note 7 Pro (Violet) - TWRP UnofficialDocument3 pagesHow To Install TWRP Root Xiaomi Redmi Note 7 Pro (Violet) - TWRP UnofficialDanny GetPas encore d'évaluation
- M201ew01 V0 AuoDocument32 pagesM201ew01 V0 AuoBonetzPas encore d'évaluation
- Zebra Printer Z90 XiII, 140 XiII, 170 XiII, 220 XiII Parts & ServiceDocument165 pagesZebra Printer Z90 XiII, 140 XiII, 170 XiII, 220 XiII Parts & ServiceToddPas encore d'évaluation
- 14.1 Manage Red Hat Enterprise Linux NetworkingDocument9 pages14.1 Manage Red Hat Enterprise Linux Networkingamit_post2000Pas encore d'évaluation
- PDF - 15 - 1614notification No. 50 of 2023Document4 pagesPDF - 15 - 1614notification No. 50 of 2023ankush laybarPas encore d'évaluation
- Toughpad FZ-M1 Tablet Accessories: Panasonic Recommends WindowsDocument4 pagesToughpad FZ-M1 Tablet Accessories: Panasonic Recommends Windowssamsularief03Pas encore d'évaluation
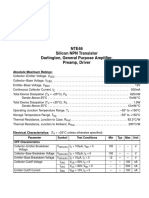
- NTE46 Silicon NPN Transistor Darlington, General Purpose Amplifier, Preamp, DriverDocument2 pagesNTE46 Silicon NPN Transistor Darlington, General Purpose Amplifier, Preamp, DriverAbel RodriguezPas encore d'évaluation
- Project Proposal - Chapter OneDocument12 pagesProject Proposal - Chapter OneMAROOF OYEWOPas encore d'évaluation
- Jeff RyanDocument45 pagesJeff RyanSuren MarkosovPas encore d'évaluation
- Raster Scan and Random Scan PDFDocument10 pagesRaster Scan and Random Scan PDFMusic DiaryPas encore d'évaluation
- Pioneer Pfp42a3hd Plasma TV Training ManualDocument103 pagesPioneer Pfp42a3hd Plasma TV Training Manualdann222Pas encore d'évaluation
- Ug67 Datasheet enDocument4 pagesUg67 Datasheet enKy GohPas encore d'évaluation
- Power Mac G4 Cube: FeaturesDocument3 pagesPower Mac G4 Cube: Featuresdigital64Pas encore d'évaluation
- Nju7505a eDocument8 pagesNju7505a eCleber MouraPas encore d'évaluation
- Slides 09Document41 pagesSlides 09ERIPIDIUSPas encore d'évaluation
- LogDocument717 pagesLogZakiyyatur RahmahPas encore d'évaluation
- Setstate Tutorial ReactDocument8 pagesSetstate Tutorial ReactDhanushPas encore d'évaluation
- Digital Clock Using 8051 Microcontroller With RTCDocument47 pagesDigital Clock Using 8051 Microcontroller With RTCsiddharthPas encore d'évaluation
- BASIC: Beginner's All-Purpose Symbolic Instruction Code: What Does BASIC Look Like A Larger Program: Animal - BASDocument6 pagesBASIC: Beginner's All-Purpose Symbolic Instruction Code: What Does BASIC Look Like A Larger Program: Animal - BASAtanu DasPas encore d'évaluation
- Introduction To RoR: A Beautiful Framework For Today's WebDocument90 pagesIntroduction To RoR: A Beautiful Framework For Today's WebshaerhassanPas encore d'évaluation
- 2.4G NRF24L01+PA+LNA Wireless Module With Antenna - ZboticDocument5 pages2.4G NRF24L01+PA+LNA Wireless Module With Antenna - ZboticvenkatasathPas encore d'évaluation
- BT-2xx ONU Configuration ManualDocument13 pagesBT-2xx ONU Configuration ManualJhon Edwin CordobaPas encore d'évaluation
- 81131H Regolat-Program ENGDocument13 pages81131H Regolat-Program ENGGopal HegdePas encore d'évaluation
- Emerson Automated Patch Management ServiceDocument8 pagesEmerson Automated Patch Management ServicebioPas encore d'évaluation