Vous aimerez peut-être aussi
- PC-03 Atención Requerimientos ClienteDocument12 pagesPC-03 Atención Requerimientos ClienteIvoDiazGPas encore d'évaluation
- Electro Neumática (Ejercicios 1-17)Document26 pagesElectro Neumática (Ejercicios 1-17)Jaime Muñoz100% (1)
- Rectificado Con MuelasDocument2 pagesRectificado Con MuelasFernando BatistaPas encore d'évaluation
- TAREA4Document2 pagesTAREA4Fernando BatistaPas encore d'évaluation
- Graficas Del Lab 3 MecaDocument2 pagesGraficas Del Lab 3 MecaFernando BatistaPas encore d'évaluation
- Regresion LinealDocument11 pagesRegresion LinealFernando BatistaPas encore d'évaluation
- TAREA4Document2 pagesTAREA4Fernando BatistaPas encore d'évaluation
- Lab ControlDocument3 pagesLab ControlFernando BatistaPas encore d'évaluation
- Lab 3 Teoria de ControlDocument2 pagesLab 3 Teoria de ControlFernando BatistaPas encore d'évaluation
- ScilabDocument1 pageScilabFernando BatistaPas encore d'évaluation
- Regresion LinealDocument1 pageRegresion LinealFernando BatistaPas encore d'évaluation
- Lab 3Document4 pagesLab 3Fernando BatistaPas encore d'évaluation
- Splines y ExtrapolacionDocument2 pagesSplines y ExtrapolacionFernando BatistaPas encore d'évaluation
- Practica de Minimos CuadradosDocument2 pagesPractica de Minimos CuadradosFernando BatistaPas encore d'évaluation
- Trabajo de Teoria de ControlDocument16 pagesTrabajo de Teoria de ControlFernando BatistaPas encore d'évaluation
- Regresión Lineal MúltipleDocument4 pagesRegresión Lineal MúltipleFernando BatistaPas encore d'évaluation
- Cronograma de EstadisticaDocument2 pagesCronograma de EstadisticaFernando BatistaPas encore d'évaluation
- Temporizadores ENYA Serie - Retardos, Impulsos y Ciclos SimétricosDocument3 pagesTemporizadores ENYA Serie - Retardos, Impulsos y Ciclos SimétricosClaudio Patricio Zarate VidalPas encore d'évaluation
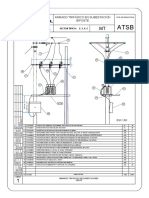
- MT Sed Atsb 22.9Document2 pagesMT Sed Atsb 22.9WinstonArrieta100% (2)
- El Diseño Educativo Como Sistema de Enseñanza AprendizajeDocument21 pagesEl Diseño Educativo Como Sistema de Enseñanza AprendizajeJuan Alexander Flores FloresPas encore d'évaluation
- Catalogo ImcoDocument10 pagesCatalogo ImcoCarlos Jair MarquezPas encore d'évaluation
- Clasificación de Bosniak de Masas Renales QuísticDocument1 pageClasificación de Bosniak de Masas Renales QuísticJosé Luis Barrantes TicllaPas encore d'évaluation
- Transcripción de Softwares Especializados para Ingeniería IndustrialDocument7 pagesTranscripción de Softwares Especializados para Ingeniería IndustrialLuis Alberto Sanchez SubiaPas encore d'évaluation
- Casos de Uso TextualesDocument16 pagesCasos de Uso TextualesJesús Juan San MartínPas encore d'évaluation
- Crear Controles en Tiempo de EjecucionDocument2 pagesCrear Controles en Tiempo de EjecucionelidatoPas encore d'évaluation
- Presentación Diapositivas Proceso Gestión DocumentalDocument22 pagesPresentación Diapositivas Proceso Gestión DocumentalJuan De Jesus MontenegroPas encore d'évaluation
- Lab.1 - Acondicionamiento de Señales AnalógicasDocument11 pagesLab.1 - Acondicionamiento de Señales AnalógicasOmar Ruiz RodríguezPas encore d'évaluation
- Refrigeration Controls InstructionsDocument2 pagesRefrigeration Controls InstructionsFREDDY CANTERO100% (1)
- Check-List para Una Carrera ProfesionalDocument5 pagesCheck-List para Una Carrera Profesionallive_93Pas encore d'évaluation
- Matriz FodaDocument1 pageMatriz FodaBrayan Benito MontoyaPas encore d'évaluation
- 1 Cuestionario Guía EvaluaciónDocument28 pages1 Cuestionario Guía EvaluaciónSalomon Elias Chavez SucasairePas encore d'évaluation
- Matriz Equipos de Proteccion Contra CaidasDocument5 pagesMatriz Equipos de Proteccion Contra CaidasmayraGP100% (1)
- Matriz Del Perfil CompetitivoDocument5 pagesMatriz Del Perfil CompetitivoAlejandra DeviaPas encore d'évaluation
- Máquina de Corte Por Chorro de Agua CNCDocument3 pagesMáquina de Corte Por Chorro de Agua CNCFely Saavedra AricaPas encore d'évaluation
- ArchivoDocument45 pagesArchivoCarlos Gerardo MarínPas encore d'évaluation
- Historia Del Timbal SinfónicoDocument14 pagesHistoria Del Timbal SinfónicoeduardoPas encore d'évaluation
- Anexo Procedimiento de Instalacion EltekDocument7 pagesAnexo Procedimiento de Instalacion EltekJuan MedinaPas encore d'évaluation
- Conceptos Básicos de La Auditoría TributariaDocument24 pagesConceptos Básicos de La Auditoría Tributariamirko javier morales calderonPas encore d'évaluation
- La Capacidad de Adaptación Vista Desde El Test de WarteggDocument5 pagesLa Capacidad de Adaptación Vista Desde El Test de WarteggFCPas encore d'évaluation
- Caldera YCRTDocument9 pagesCaldera YCRTOPISantaCruzPas encore d'évaluation
- Carrera Espacial - Guerra FríaDocument8 pagesCarrera Espacial - Guerra Fríalau.lauPas encore d'évaluation
- Especificaciones técnicas TW106 altavoz intercomunicación ventanaDocument2 pagesEspecificaciones técnicas TW106 altavoz intercomunicación ventanaFrancisco ChangoPas encore d'évaluation
- VOLQUETA 4X4 OPERACIÓN Y MANTENIMIENTODocument128 pagesVOLQUETA 4X4 OPERACIÓN Y MANTENIMIENTOdchosgo2639Pas encore d'évaluation
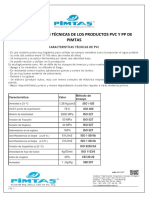
- Hoja Tecnica PimtasDocument20 pagesHoja Tecnica Pimtasrobinson RPas encore d'évaluation