Vous aimerez peut-être aussi
- Investigación de Ecuaciones Diferenciales Series de Fourier (Función Impar) .Document11 pagesInvestigación de Ecuaciones Diferenciales Series de Fourier (Función Impar) .Luis Miguel Pineda100% (1)
- Experiencias sobre circuitos eléctricos en serie operados por corriente directaD'EverandExperiencias sobre circuitos eléctricos en serie operados por corriente directaPas encore d'évaluation
- Capacitancia InformeDocument13 pagesCapacitancia InformeDiego RojasPas encore d'évaluation
- Coeficientes Indeterminados TeoríaDocument2 pagesCoeficientes Indeterminados TeoríaJess OrtizPas encore d'évaluation
- Tarea Variación de Parámetros PDFDocument1 pageTarea Variación de Parámetros PDFJavier Diaz HPas encore d'évaluation
- II Informe de FisicaDocument7 pagesII Informe de FisicasoldjairPas encore d'évaluation
- Potencias y Raices en Los Números ComplejosDocument8 pagesPotencias y Raices en Los Números ComplejosEDWAR DAVID LESMES RUIZ (Estudiante)Pas encore d'évaluation
- Apuntes de Probabilidad para Facen - RicardoDocument79 pagesApuntes de Probabilidad para Facen - RicardoAdánNoelPas encore d'évaluation
- Efecto de Coriolis y LagrangianoDocument7 pagesEfecto de Coriolis y LagrangianoEvelin Ortiz VallePas encore d'évaluation
- Aveiga Briones Cepeda Changoluisa Curipoma Angamarca Analisis Grafico Gr11Document4 pagesAveiga Briones Cepeda Changoluisa Curipoma Angamarca Analisis Grafico Gr11Jinson ChavezPas encore d'évaluation
- Modelado Con Ecuaciones Diferenciales de Orden SuperiorDocument6 pagesModelado Con Ecuaciones Diferenciales de Orden SuperiorKatherin SierraPas encore d'évaluation
- Métodos para calcular integrales impropiasDocument262 pagesMétodos para calcular integrales impropiasCHILON ISPILCO ELIOPas encore d'évaluation
- 09 Reporte Teorema de TorricelliDocument4 pages09 Reporte Teorema de TorricelliMaicol Alarcon AbantoPas encore d'évaluation
- 3.1 Parametrizacion de Curvas PlanasDocument8 pages3.1 Parametrizacion de Curvas PlanasPablo SaritamaPas encore d'évaluation
- Laboratorio de CapacitanciaDocument19 pagesLaboratorio de CapacitanciaAlexander RosalesPas encore d'évaluation
- Aplicacion de Funcion Armonicas de Numeros ComplejosDocument5 pagesAplicacion de Funcion Armonicas de Numeros Complejosdiego GSPas encore d'évaluation
- Traspasos de VillarrealDocument14 pagesTraspasos de VillarrealRyan Ascencios SeguraPas encore d'évaluation
- Laboratorio SolenoideDocument3 pagesLaboratorio SolenoideCristian J. CaballeroPas encore d'évaluation
- Guia - Fisica - III - CONDENSADORESDocument7 pagesGuia - Fisica - III - CONDENSADORESBrisseth Huicho ZavalaPas encore d'évaluation
- Informe 3 de Fisica General - OficialDocument43 pagesInforme 3 de Fisica General - OficialKEMBERLEY NICOLPas encore d'évaluation
- Problemas Campo ElectricoDocument4 pagesProblemas Campo Electricoyohan ramirez100% (1)
- Doble Malla SolucionesDocument3 pagesDoble Malla Solucionesricardotroncoso2012Pas encore d'évaluation
- Practica Dirigida de Fisica III Campo ElectricoDocument6 pagesPractica Dirigida de Fisica III Campo Electricobernabe rosado reyesPas encore d'évaluation
- Interpretación de Determinantes y Aplicaciones de MatricesDocument26 pagesInterpretación de Determinantes y Aplicaciones de MatricesFabiola Calderon0% (2)
- Dinamica VariosDocument18 pagesDinamica VariosPili DizPas encore d'évaluation
- EcuacionesLagrangeSEODocument5 pagesEcuacionesLagrangeSEOAnthony HuacachiPas encore d'évaluation
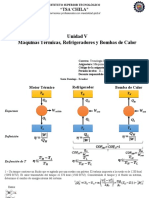
- Unidad V - MAQUINAS TERMICAS, RIFRIGERADORES, BOMBAS DE CALOR - CLASE 3Document37 pagesUnidad V - MAQUINAS TERMICAS, RIFRIGERADORES, BOMBAS DE CALOR - CLASE 3Едуин ТарантоPas encore d'évaluation
- PRACTICA III UNIDAD - PiDocument17 pagesPRACTICA III UNIDAD - PiHECTOR FRANCISCO ORE QUIROZPas encore d'évaluation
- Informe de Laboratorio#8 FIS1102 IDocument14 pagesInforme de Laboratorio#8 FIS1102 IRomerrrPas encore d'évaluation
- Tensores básicos: Delta de Kronecker y Épsilon de Levi-CivitaDocument3 pagesTensores básicos: Delta de Kronecker y Épsilon de Levi-CivitaAlexis MasidePas encore d'évaluation
- Ecuacion de Calor (Resumen)Document18 pagesEcuacion de Calor (Resumen)brunoPas encore d'évaluation
- Proyecto Simpson 3/8Document3 pagesProyecto Simpson 3/8Fernanda González Rocha100% (1)
- Centro de MasaDocument21 pagesCentro de MasaWallo48100% (1)
- Solución 3 Elec 2020-02Document3 pagesSolución 3 Elec 2020-02Hugo Gonzalez100% (1)
- Física-Informe 5 Segunda Ley de NewtonDocument4 pagesFísica-Informe 5 Segunda Ley de NewtonCarlos AndrésPas encore d'évaluation
- Interruptores NeumáticosDocument3 pagesInterruptores Neumáticossurvivalsherman4100% (1)
- Aplicaciones de Integral de LineaDocument12 pagesAplicaciones de Integral de LineaAlejandra Chavez VasquezPas encore d'évaluation
- Ejemplos Movimiento ParabolicoDocument2 pagesEjemplos Movimiento ParabolicoCinthia cayoPas encore d'évaluation
- Demostración de Número de CoordinaciónDocument3 pagesDemostración de Número de CoordinaciónID: 73100% (1)
- FortranDocument30 pagesFortranjhoshy nathalyPas encore d'évaluation
- Formulario de Transferencia de CalorDocument6 pagesFormulario de Transferencia de CalorjteadorePas encore d'évaluation
- Sucesiones y Series de FuncionesDocument20 pagesSucesiones y Series de Funcionestakamaru777Pas encore d'évaluation
- Aplicación de Las Matrices A La IngenieríaDocument8 pagesAplicación de Las Matrices A La IngenieríaOMAR ROLANDO CORREA FELIPEPas encore d'évaluation
- Practica1 Labo Cir IIIDocument21 pagesPractica1 Labo Cir IIILiz Escobar ParragaPas encore d'évaluation
- Practica #5 Condicion de EquilibrioDocument7 pagesPractica #5 Condicion de EquilibrioLuis RomeroPas encore d'évaluation
- Trabajo Autonomo IIDocument19 pagesTrabajo Autonomo IIRobayo 3rikPas encore d'évaluation
- Informe de Laboratorio #6 de Fisica IIIDocument33 pagesInforme de Laboratorio #6 de Fisica IIIAnonymous OW7RYIUwtPas encore d'évaluation
- Fórmulas campo eléctricoDocument1 pageFórmulas campo eléctricoGuti AdgsPas encore d'évaluation
- Vaciado de Un Depósito AbiertoDocument2 pagesVaciado de Un Depósito AbiertoAYALA CASTAÑEDA ANDERSON DEIVEPas encore d'évaluation
- Fuerzas eléctricas y campos en problemas de físicaDocument4 pagesFuerzas eléctricas y campos en problemas de físicalinaPas encore d'évaluation
- Almacenadores Y Respuesta NaturalDocument58 pagesAlmacenadores Y Respuesta NaturalErasin0% (1)
- Ley de Faraday, Ohm, CoulombDocument3 pagesLey de Faraday, Ohm, CoulombAna Karen Priego CruzPas encore d'évaluation
- Examen Parcial 2 23369 PDFDocument4 pagesExamen Parcial 2 23369 PDFSebastian FajardoPas encore d'évaluation
- Interpolación de Lagrange.Document16 pagesInterpolación de Lagrange.Saul Perez PerezPas encore d'évaluation
- Ley de Hooke Informe 1Document13 pagesLey de Hooke Informe 1Joshua CrederPas encore d'évaluation
- Aplicaciones de Las Derivadas ParcialesDocument28 pagesAplicaciones de Las Derivadas ParcialesJonathan Pier Linarez LaizaPas encore d'évaluation
- Modelamiento de Un Sistema Fisico Con Ecuaciones DiferencialesDocument31 pagesModelamiento de Un Sistema Fisico Con Ecuaciones DiferencialesSandra ChachaPas encore d'évaluation
- Aplicación de Ecuaciones DiferencialesDocument15 pagesAplicación de Ecuaciones DiferencialesJosue Hector Ramos CardenasPas encore d'évaluation
- Tarea Oscilaciones 3Document5 pagesTarea Oscilaciones 3Juan Carlos Morales ParraPas encore d'évaluation
- Estandarización ácido-base de HCl y NaOHDocument10 pagesEstandarización ácido-base de HCl y NaOHAbner ValdiviesoPas encore d'évaluation
- Contaminación Del Suelo en La Zona Minera de Rasgatá BajoDocument13 pagesContaminación Del Suelo en La Zona Minera de Rasgatá BajoAbner ValdiviesoPas encore d'évaluation
- Solucion Examen 2 Do ParcialDocument6 pagesSolucion Examen 2 Do ParcialAbner ValdiviesoPas encore d'évaluation
- Contaminación Del Suelo en La Zona Minera de Rasgatá BajoDocument13 pagesContaminación Del Suelo en La Zona Minera de Rasgatá BajoAbner ValdiviesoPas encore d'évaluation
- Determinación de alcalinidad en agua mediante métodos titulométrico y potenciométricoDocument10 pagesDeterminación de alcalinidad en agua mediante métodos titulométrico y potenciométricoAbner ValdiviesoPas encore d'évaluation
- INTRODUCCIÓNDocument28 pagesINTRODUCCIÓNAbner ValdiviesoPas encore d'évaluation
- Informe1 - Titulaciones Ácido - BaseDocument10 pagesInforme1 - Titulaciones Ácido - BaseAbner ValdiviesoPas encore d'évaluation
- Informe1 - Titulaciones Ácido - BaseDocument10 pagesInforme1 - Titulaciones Ácido - BaseAbner ValdiviesoPas encore d'évaluation
- Medición Con Estación Total y CintaDocument3 pagesMedición Con Estación Total y CintaAbner ValdiviesoPas encore d'évaluation
- Formato de Informe QADocument9 pagesFormato de Informe QAAbner ValdiviesoPas encore d'évaluation
- Tipos de Proyecciones TopograficasDocument8 pagesTipos de Proyecciones TopograficasAbner ValdiviesoPas encore d'évaluation
- A Plantilla Poligonal CIVG1002-1Document1 pageA Plantilla Poligonal CIVG1002-1Abner ValdiviesoPas encore d'évaluation
- Tarea - Práctica 8Document2 pagesTarea - Práctica 8Abner ValdiviesoPas encore d'évaluation
- Práctica 8Document1 pagePráctica 8Dannes Vera GonzalezPas encore d'évaluation
- B Plantilla Radiación CIVG1002-1Document6 pagesB Plantilla Radiación CIVG1002-1Abner ValdiviesoPas encore d'évaluation
- Ejercicios de Intervalos de Confianza DB07Document2 pagesEjercicios de Intervalos de Confianza DB07Abner ValdiviesoPas encore d'évaluation
- Análisis de Resultados - Datos Con NavegadoresDocument3 pagesAnálisis de Resultados - Datos Con NavegadoresAbner ValdiviesoPas encore d'évaluation
- Lipschitz Continuous Functions Es PDFDocument3 pagesLipschitz Continuous Functions Es PDFKevin100% (1)
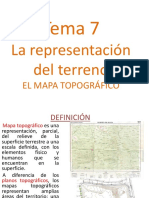
- Tema7 Elmapa TopograficoDocument25 pagesTema7 Elmapa TopograficoCarlos EnriquePas encore d'évaluation
- Lección 4 LAS ETAPAS DE PROYECTODocument9 pagesLección 4 LAS ETAPAS DE PROYECTOElizabeth de LeonPas encore d'évaluation
- Enfermedades Suprarrenales 2017Document25 pagesEnfermedades Suprarrenales 2017Geraldine Bobadilla PastorPas encore d'évaluation
- Macro Matriz de Recursos SST 2023Document6 pagesMacro Matriz de Recursos SST 2023SARA LUCIA TANGARIFE PINEDAPas encore d'évaluation
- Aglutinantes NaturalesDocument20 pagesAglutinantes NaturalesMaria Paredes100% (2)
- COAP3Document32 pagesCOAP3ofg333Pas encore d'évaluation
- 6 SESION La Globalización, Internet y Redes SocialesDocument3 pages6 SESION La Globalización, Internet y Redes SocialesTania Cerna NarcisoPas encore d'évaluation
- Bienes para LaboratorioDocument3 pagesBienes para LaboratorioEl chespy y sus amigos.Pas encore d'évaluation
- Resolución Administrativa N°202-2013Document15 pagesResolución Administrativa N°202-2013oitedrstPas encore d'évaluation
- Diseño PublicitarioDocument24 pagesDiseño PublicitarioCas Isac100% (3)
- Dos personasDocument4 pagesDos personasFacundo VillafañePas encore d'évaluation
- Lifestyle Meal Plan - ESDocument10 pagesLifestyle Meal Plan - ESfootpeidoPas encore d'évaluation
- Cuadernillo Saberes y Pensamiento Cientifico 06 Al 09 de Febrero Del 2024 2.0Document2 pagesCuadernillo Saberes y Pensamiento Cientifico 06 Al 09 de Febrero Del 2024 2.0Liz Angelica Gutierrez de RodartePas encore d'évaluation
- Ejercicios Diseño AntisismicoDocument4 pagesEjercicios Diseño AntisismicoraulpumacahuaPas encore d'évaluation
- Captura de Pantalla 2022-11-13 A La(s) 18.10.29Document8 pagesCaptura de Pantalla 2022-11-13 A La(s) 18.10.29camila belen toralesPas encore d'évaluation
- ESTUDIO ORGANIZACIÓN Y ASPECTOS LEGALESDocument83 pagesESTUDIO ORGANIZACIÓN Y ASPECTOS LEGALESMelvinDonaldoLopez100% (1)
- Cuestionario Miembro SuperiorDocument22 pagesCuestionario Miembro SuperiorAislinn BarriosPas encore d'évaluation
- SRAMDocument12 pagesSRAMque buenoPas encore d'évaluation
- Informe Saponificación Del Aceite UsadoDocument7 pagesInforme Saponificación Del Aceite Usado05-OB-HU-CARLA DANIELA VILCAS CARRIONPas encore d'évaluation
- Functional Programming With Elixir EsDocument29 pagesFunctional Programming With Elixir Eselkinlon0930Pas encore d'évaluation
- Silla de ruedas controlada por movimientos de cabezaDocument14 pagesSilla de ruedas controlada por movimientos de cabezaJean MezaPas encore d'évaluation
- Grupo 3 - ESTUDIO DEL ANGULO EN POSICION NORMALDocument19 pagesGrupo 3 - ESTUDIO DEL ANGULO EN POSICION NORMALYessenia HuancaPas encore d'évaluation
- Tarea 3 de Psicologia EducativaDocument4 pagesTarea 3 de Psicologia EducativaclaritzaPas encore d'évaluation
- Balance de MateriaDocument5 pagesBalance de MateriaJulio ZepedaPas encore d'évaluation
- PETS Preparación de Tapón en Labores ParalizadasDocument2 pagesPETS Preparación de Tapón en Labores ParalizadasDario Bravo BordaPas encore d'évaluation
- GRUPO 1 - La Evolución Digital en El Sistema Financiero PeruanoDocument16 pagesGRUPO 1 - La Evolución Digital en El Sistema Financiero PeruanoFelipe Soplopuco RivadeneiraPas encore d'évaluation
- Economía en IrlandaDocument5 pagesEconomía en Irlandatuperrotucaca0Pas encore d'évaluation
- Instructivo Proceso de Examen de Título-GradoDocument6 pagesInstructivo Proceso de Examen de Título-GradoMarcos Antonio TonolexPas encore d'évaluation
- Examen Parcial Contabilidad Gerencial UNITECDocument7 pagesExamen Parcial Contabilidad Gerencial UNITECDaniela Zavala0% (1)
- LINARES-PONCE, Partido ArqDocument1 pageLINARES-PONCE, Partido ArqRenatoLinaresGonzalesPas encore d'évaluation
- Cuestionario Disco DuroDocument2 pagesCuestionario Disco Durodaniel gonzalesPas encore d'évaluation