Vous aimerez peut-être aussi
- Cálculo de Cota Redonda Por Interpolación PDFDocument1 pageCálculo de Cota Redonda Por Interpolación PDFCristian Andres Herrera AldanaPas encore d'évaluation
- Aceleración Velocidad y PosiciónDocument8 pagesAceleración Velocidad y PosiciónKamila Albujar OrtizPas encore d'évaluation
- Informe Fisica M.R.UDocument4 pagesInforme Fisica M.R.UGERSSON RONALDO RUIZ ULLOAPas encore d'évaluation
- Informe Laboratorio No1 MRU OKDocument25 pagesInforme Laboratorio No1 MRU OKJuan Jose Llanos EstradaPas encore d'évaluation
- Vectores de Posición, Velociad, AceleraciónDocument7 pagesVectores de Posición, Velociad, AceleraciónfabiolaPas encore d'évaluation
- Distancia de Visibilidad de Parada y VelocidadDocument12 pagesDistancia de Visibilidad de Parada y VelocidadAngela SaavedraPas encore d'évaluation
- Arias AleDocument17 pagesArias AlePierina Arias MenendezPas encore d'évaluation
- Movimiento Rectilineo UniformeDocument11 pagesMovimiento Rectilineo UniformePamela Natali Heredia RodríguezPas encore d'évaluation
- Principio D AlembertDocument9 pagesPrincipio D AlembertJEFFERSON STEVEN FLORIAN HERNANDEZPas encore d'évaluation
- Semana 12 - Sistema ParticulasDocument31 pagesSemana 12 - Sistema ParticulasAngelo HuamaniPas encore d'évaluation
- Ejemplo de Curva VerticalDocument14 pagesEjemplo de Curva VerticalJimmy PaucarPas encore d'évaluation
- Cinematica, Velocidad, Curva y TramoDocument25 pagesCinematica, Velocidad, Curva y TramoEmmanuel LombardiPas encore d'évaluation
- Guia Resuleta Mecanica de SuelosDocument64 pagesGuia Resuleta Mecanica de Suelosbrian rochaPas encore d'évaluation
- Principio de Transmisibilidad - INFOGRAFÍADocument1 pagePrincipio de Transmisibilidad - INFOGRAFÍAAriel plutarco cardoso herreraPas encore d'évaluation
- Curva Espiral-ClotoideDocument11 pagesCurva Espiral-Clotoideheiner hilarion bustincia games100% (1)
- Dinamica Unc VibracionesDocument35 pagesDinamica Unc VibracionesCésar MarinPas encore d'évaluation
- Ensayo de Tension IndirectaDocument10 pagesEnsayo de Tension IndirectayskkcresPas encore d'évaluation
- Topografia Planos en CarreteraDocument22 pagesTopografia Planos en CarreteraCarlos Miguel AlvarezPas encore d'évaluation
- Falla Ductil en Viguetas Con Cuantia Cercana A La MaximaDocument30 pagesFalla Ductil en Viguetas Con Cuantia Cercana A La MaximaJose Carlos Perez Cabarcas100% (1)
- Reporte de Práctica # 1Document3 pagesReporte de Práctica # 1Victor CalvilloPas encore d'évaluation
- Impulso y Cantidad de Movimiento.Document40 pagesImpulso y Cantidad de Movimiento.JeremíasPas encore d'évaluation
- Formula de La Torsión para Barras CircularesDocument3 pagesFormula de La Torsión para Barras CircularesJayson MontañoPas encore d'évaluation
- Movimiento CurvilineoDocument6 pagesMovimiento CurvilineoIvan IturbidePas encore d'évaluation
- Resumen Del Desarrollo de La Historia de La HidrologíaDocument3 pagesResumen Del Desarrollo de La Historia de La Hidrologíazulmary uco marquezPas encore d'évaluation
- Espirales-Registro Peraltes y SobreanchoDocument34 pagesEspirales-Registro Peraltes y SobreanchoJOSE LUIS RAMIREZPas encore d'évaluation
- DEFLEXIONESDocument18 pagesDEFLEXIONESAndrés Nicolás Díaz100% (1)
- Semana 1Document42 pagesSemana 1AlexsanderSullonPas encore d'évaluation
- Resumen de MRUADocument4 pagesResumen de MRUAIsrael García Nelo100% (1)
- FD-Presentación 3 Rev01Document23 pagesFD-Presentación 3 Rev01Robinson Cesar De la VegaPas encore d'évaluation
- Lab 7 Mov Rotacion y TraslacionDocument5 pagesLab 7 Mov Rotacion y TraslacionYury Ruiz CruzPas encore d'évaluation
- Diseño de Estructuras SubterraneasDocument21 pagesDiseño de Estructuras SubterraneasDaniel Alejandro Carrillo Gutierrez100% (1)
- Péndulo SimpleDocument6 pagesPéndulo SimpleJorge Basantes0% (1)
- UNIDAD 5 Modelos para La Planeación Programación y Control de Proyectos de ConstrucciónDocument31 pagesUNIDAD 5 Modelos para La Planeación Programación y Control de Proyectos de ConstrucciónGino ReyesPas encore d'évaluation
- Ejercicio II.2 Granulometria Por SedimentacionDocument2 pagesEjercicio II.2 Granulometria Por SedimentacionMartin Velasco Ormeño100% (3)
- Cinemática Rectilínea, Movimiento ErráticoDocument21 pagesCinemática Rectilínea, Movimiento ErráticoJonn GuerraPas encore d'évaluation
- Nivelación SatelitalDocument1 pageNivelación SatelitalSebastian Pedraza RamirezPas encore d'évaluation
- Coordenadas Polares y RectangularesDocument15 pagesCoordenadas Polares y RectangularesJazminPas encore d'évaluation
- Cinemática Del Cuerpo Rigido-1Document13 pagesCinemática Del Cuerpo Rigido-1luis2018Pas encore d'évaluation
- Informe de Fisica I Conservacion de La Energia MecanicaDocument6 pagesInforme de Fisica I Conservacion de La Energia MecanicamarloncitopzjtPas encore d'évaluation
- Estatica - Sistema de Cursores - Sesión 1 PDFDocument34 pagesEstatica - Sistema de Cursores - Sesión 1 PDFLinked Carrera ReyesPas encore d'évaluation
- Semana-01 Clase PDFDocument28 pagesSemana-01 Clase PDFOlivera Fernandez YeisonPas encore d'évaluation
- Propiedades de La MaderaDocument9 pagesPropiedades de La MaderaRogher Bautista BardalesPas encore d'évaluation
- Conceptos de Cinemática (Biología)Document4 pagesConceptos de Cinemática (Biología)Sebastián Tabilo MuñozPas encore d'évaluation
- Trabajos de Exploración para Obras Importantes de Ingeniería CivilDocument5 pagesTrabajos de Exploración para Obras Importantes de Ingeniería CivilMoreno AurelioPas encore d'évaluation
- Nivel TopograficoDocument25 pagesNivel TopograficoJaime Monteza SosaPas encore d'évaluation
- Taller Dinámica y CircularDocument3 pagesTaller Dinámica y CircularLuis LoaizaPas encore d'évaluation
- Mecánica Dinámica - Unidad 2 2017Document67 pagesMecánica Dinámica - Unidad 2 2017Leonardo Diaz GonzalezPas encore d'évaluation
- Capítulo IDocument45 pagesCapítulo IIng Ignacio Rojo GastelumPas encore d'évaluation
- AltimetriaDocument43 pagesAltimetriaCarlos MarioPas encore d'évaluation
- Práctica Jalones y WinchaDocument7 pagesPráctica Jalones y WinchaValery Geraldine Valverde GoyzuetaPas encore d'évaluation
- Formulas TopografiaDocument2 pagesFormulas TopografiaGonzalo Salazar CastroPas encore d'évaluation
- Forma ModalesDocument13 pagesForma ModalesJesús J. Romero ValerianoPas encore d'évaluation
- 4 Levantamiento SatelitalDocument40 pages4 Levantamiento SatelitalGiulianna FloresPas encore d'évaluation
- Dinamica PpsDocument35 pagesDinamica PpsAnonymous BYtN6oG100% (1)
- Informe 4Document24 pagesInforme 4Thalia Herrera DominguezPas encore d'évaluation
- Movimiento Uniformemente AceleradoDocument17 pagesMovimiento Uniformemente Aceleradogreykol sanche zimanPas encore d'évaluation
- Movimiento Rectilíneo Uniforme Fisica de Tercer AñoDocument20 pagesMovimiento Rectilíneo Uniforme Fisica de Tercer Añoluis carrascoPas encore d'évaluation
- DanielDocument149 pagesDanielhigadosPas encore d'évaluation
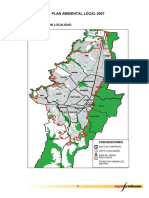
- PAL Chapinero-SDADocument29 pagesPAL Chapinero-SDAchristian francoPas encore d'évaluation
- Numeros FraccionariosDocument12 pagesNumeros FraccionariosCASE BRPas encore d'évaluation
- FUNDAMENTOS DE ECONOMIA EnsayoDocument5 pagesFUNDAMENTOS DE ECONOMIA EnsayomonicaPas encore d'évaluation
- Copia de TFGDocument37 pagesCopia de TFGana_navasolPas encore d'évaluation
- Partograma Con Curva de AlertaDocument24 pagesPartograma Con Curva de AlertaJoshimarLopezPas encore d'évaluation
- FDS AntiespumanteDocument11 pagesFDS AntiespumanteJulian Mora AntivarPas encore d'évaluation
- Reglamento Interno Padres 2024Document43 pagesReglamento Interno Padres 2024Kelvin PalaciosPas encore d'évaluation
- Cañasbamba Tractoragricola CalculosDocument17 pagesCañasbamba Tractoragricola CalculosLuz Yda Brito GonzalesPas encore d'évaluation
- El Articulo de Divulgacion CientificaDocument7 pagesEl Articulo de Divulgacion CientificaFernandaDominguezPas encore d'évaluation
- Diapositivas EmprendimientoDocument17 pagesDiapositivas EmprendimientoSilvana ManchayPas encore d'évaluation
- Cobertura VegetalDocument11 pagesCobertura Vegetalluis taboada100% (1)
- Habilidades de Comprensión LectoraDocument11 pagesHabilidades de Comprensión LectoraElisa LaraPas encore d'évaluation
- Lección 1 / Actividad 1: Fundamentos de La Red 5G (Nivel 2)Document3 pagesLección 1 / Actividad 1: Fundamentos de La Red 5G (Nivel 2)Dark100% (1)
- DH y Del TrabajoDocument3 pagesDH y Del TrabajoAngie MartinezPas encore d'évaluation
- Gestion Estrategica de Compras y Proveedores 2021 - Caso Practico Parte 1 EduDocument3 pagesGestion Estrategica de Compras y Proveedores 2021 - Caso Practico Parte 1 EduEduardo Aquino LinoPas encore d'évaluation
- LA CIENCIA Y LA ECONOMIA (Etica y Valores Ultimo Bloque)Document10 pagesLA CIENCIA Y LA ECONOMIA (Etica y Valores Ultimo Bloque)Itzel AtzinPas encore d'évaluation
- Grupo#4.Gestion de Seguridad de Los ProcesosDocument46 pagesGrupo#4.Gestion de Seguridad de Los Procesosangel_7_5004635Pas encore d'évaluation
- Segunda Practica Calificada Eureka 2010-IIDocument8 pagesSegunda Practica Calificada Eureka 2010-IIGuido Yasmani Puma PumaPas encore d'évaluation
- Tema 2 TransimisiónDocument69 pagesTema 2 TransimisiónDori Lopez GilPas encore d'évaluation
- Toolkit I+E N2 - VFDocument37 pagesToolkit I+E N2 - VFCarlos Moraga Copier100% (2)
- Nom-016 Operación y Mantenimiento de Ferrocarriles Condiciones de Seguridad e HigieneDocument10 pagesNom-016 Operación y Mantenimiento de Ferrocarriles Condiciones de Seguridad e HigieneRaymond MarcialPas encore d'évaluation
- Rúbrica Regiones de ChileDocument2 pagesRúbrica Regiones de ChileJOCELINE PAOLA RIVEROS MENDEZPas encore d'évaluation
- Resumen Capitulo 46 GuytonDocument8 pagesResumen Capitulo 46 GuytonMcPotatoe :86% (7)
- Gestion Eficaz Del Tiempo UNIDAD IDocument35 pagesGestion Eficaz Del Tiempo UNIDAD IcarolinaPas encore d'évaluation
- Etnografía Importancia, Reflexividad, Traajo de Campo Y Entrevista - Guber - RestrepoDocument2 pagesEtnografía Importancia, Reflexividad, Traajo de Campo Y Entrevista - Guber - RestrepoKevin VelascoPas encore d'évaluation
- Trabajo Grupal Pensamiento Lógico FINALDocument12 pagesTrabajo Grupal Pensamiento Lógico FINALRINI JACKELINE DE LA CRUZ PAREDES75% (4)
- Informe de Laboratorio #02 - TelematicaDocument12 pagesInforme de Laboratorio #02 - TelematicaRocio Sthefanny Apaza DelgadoPas encore d'évaluation
- Ea U2 PracticasDocument11 pagesEa U2 PracticasLeslie RodríguezPas encore d'évaluation
- Catalogo Gruetzner - 2019 - Rolando FallaDocument32 pagesCatalogo Gruetzner - 2019 - Rolando FallaDiana LuciaPas encore d'évaluation