Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Laurent Polynomial - WikipediaDocument2 pagesLaurent Polynomial - WikipediaBoneChenPas encore d'évaluation
- Math 8 First Quarterly Tos 2022 2023Document4 pagesMath 8 First Quarterly Tos 2022 2023Carmina CunananPas encore d'évaluation
- Polynomial RingsDocument9 pagesPolynomial Ringssakshi raiPas encore d'évaluation
- Course Outline - AlgebraDocument3 pagesCourse Outline - AlgebraTú NguyễnPas encore d'évaluation
- Chapter 2-MMWDocument40 pagesChapter 2-MMWCarlaMaeMaquirangPas encore d'évaluation
- STPM (Math M)Document54 pagesSTPM (Math M)norhidayumohdzaini100% (1)
- Algorithms For Polynomial and Rational ApproximationDocument141 pagesAlgorithms For Polynomial and Rational ApproximationMuhammad AmmarPas encore d'évaluation
- MM UniDocument100 pagesMM Unibhavana0% (1)
- BSCE Course Outline - PreCalculusDocument4 pagesBSCE Course Outline - PreCalculusClaire GubatPas encore d'évaluation
- Integrated Review Week 2 MathematicsDocument28 pagesIntegrated Review Week 2 MathematicsMarvin PamePas encore d'évaluation
- TI-NspireCAS Reference Guide EN PDFDocument293 pagesTI-NspireCAS Reference Guide EN PDFИлья ДашкевичPas encore d'évaluation
- St. Peter's College of Misamis Oriental, IncDocument2 pagesSt. Peter's College of Misamis Oriental, IncKier Abejuela AcutPas encore d'évaluation
- CH 02Document32 pagesCH 02Kat FishPas encore d'évaluation
- Math 101 Unit 2 Lesson 1Document11 pagesMath 101 Unit 2 Lesson 1Paul John PanganibanPas encore d'évaluation
- CBCS - BSC (Hons) Maths LOCF SyllabusDocument70 pagesCBCS - BSC (Hons) Maths LOCF SyllabusAkshatPas encore d'évaluation
- MCR3U7 Course Outline 2020Document2 pagesMCR3U7 Course Outline 2020RickPas encore d'évaluation
- Math 1311 2020Document21 pagesMath 1311 2020api-506911304Pas encore d'évaluation
- Baker MAT 1033 Online Syllabus Spring 2017-1Document13 pagesBaker MAT 1033 Online Syllabus Spring 2017-1Trey CrossPas encore d'évaluation
- Numerical Methods: Module 2 Part 2 by Carlos Hortinela IVDocument11 pagesNumerical Methods: Module 2 Part 2 by Carlos Hortinela IVBenj MendozaPas encore d'évaluation
- Algebra 2 PDFDocument600 pagesAlgebra 2 PDFAndré Camargo Llano100% (16)
- Module 1 Fundamentals of AlgebraDocument50 pagesModule 1 Fundamentals of AlgebraGEL UPas encore d'évaluation
- MDAT - Math 7 - 2ndDocument6 pagesMDAT - Math 7 - 2ndJaycel TargaPas encore d'évaluation
- 5.1 - Adding, Subtracting, Multiplying and Dividing Functions Math 30-1Document18 pages5.1 - Adding, Subtracting, Multiplying and Dividing Functions Math 30-1Math 30-1 EDGE Study Guide Workbook - by RTD LearningPas encore d'évaluation
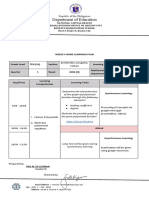
- Department of Education: Weekly Home Learning PlanDocument2 pagesDepartment of Education: Weekly Home Learning PlanEric de GuzmanPas encore d'évaluation
- June Exam 2014 Grade 8 MathematicsDocument7 pagesJune Exam 2014 Grade 8 MathematicsEstelle Esterhuizen100% (1)
- Integrability of Dynamical Systems: Algebra and AnalysisDocument390 pagesIntegrability of Dynamical Systems: Algebra and AnalysisMoises Lama100% (1)
- Socrative Quizzes BankDocument48 pagesSocrative Quizzes BankHyunSung KimPas encore d'évaluation
- Term 1 Exam 2023Document5 pagesTerm 1 Exam 2023Fouziya RamzyPas encore d'évaluation
- Q1 - 1.1 - Common Monomial FactorDocument18 pagesQ1 - 1.1 - Common Monomial FactorErika Lloren Luyun-GaliaPas encore d'évaluation
- Programming Laboratory Lab - ManualDocument56 pagesProgramming Laboratory Lab - ManualAmit SangalePas encore d'évaluation