Vous aimerez peut-être aussi
- Las ViejitasDocument12 pagesLas ViejitasJhon DavidPas encore d'évaluation
- Catálogo de Experiencias Sindicales de SustituciónDocument82 pagesCatálogo de Experiencias Sindicales de SustituciónJhon DavidPas encore d'évaluation
- Ejemplo 3 Articulo Revista RIEDocument18 pagesEjemplo 3 Articulo Revista RIEJhon DavidPas encore d'évaluation
- Ejemplo 2 Articulo Revista RIEDocument20 pagesEjemplo 2 Articulo Revista RIEJhon DavidPas encore d'évaluation
- Fisica I (Caida Libre)Document10 pagesFisica I (Caida Libre)Jhon DavidPas encore d'évaluation
- Sentencia por accidente laboralDocument9 pagesSentencia por accidente laboralJhon DavidPas encore d'évaluation
- Oscilaciones en Una Cuerda FinitaDocument6 pagesOscilaciones en Una Cuerda FinitaJhon DavidPas encore d'évaluation
- Masa Resorte Practica 2Document10 pagesMasa Resorte Practica 2Jhon DavidPas encore d'évaluation
- 00 - Disartria - Dimensiones Clinica MayoDocument3 pages00 - Disartria - Dimensiones Clinica MayoGabriel CórdovaPas encore d'évaluation
- Ensayo de Formacion SocioculturalDocument5 pagesEnsayo de Formacion SocioculturalJosé Montes de OcaPas encore d'évaluation
- Estadística y ProbabilidadesDocument14 pagesEstadística y ProbabilidadesGianella GuerraPas encore d'évaluation
- Optimización de producción con Solver en ExcelDocument6 pagesOptimización de producción con Solver en ExcelMartin Castro ArquerosPas encore d'évaluation
- 5to Grado Septiembre - 03 La Injusticia Social en La Independencia 2023-2024Document28 pages5to Grado Septiembre - 03 La Injusticia Social en La Independencia 2023-2024AMON RAPas encore d'évaluation
- Por Qué Surge El BarrocoDocument3 pagesPor Qué Surge El BarrocoJose JaspePas encore d'évaluation
- Guía 2 Primero BásicoDocument21 pagesGuía 2 Primero BásicoPaulina Alejandra Rogel TirachiniPas encore d'évaluation
- 10°y 11° Grado CUADRO DIAGNÓSTICO DE MATEMÁTICA - MIGUELDocument4 pages10°y 11° Grado CUADRO DIAGNÓSTICO DE MATEMÁTICA - MIGUELMiguel SandobalPas encore d'évaluation
- Guía sobre encuestas salarialesDocument11 pagesGuía sobre encuestas salarialesJorge Lopez DominguezPas encore d'évaluation
- Evolucion Historica y Antecedentes Del Mercado Laboral en VenezuelaDocument3 pagesEvolucion Historica y Antecedentes Del Mercado Laboral en VenezuelaRey SolitarioPas encore d'évaluation
- Conceptos, parámetros y etapas de la eutrofizaciónDocument36 pagesConceptos, parámetros y etapas de la eutrofizaciónMarco López ChilcaPas encore d'évaluation
- Motivacion de EfectanciaDocument13 pagesMotivacion de EfectanciaKarhen ReyhexPas encore d'évaluation
- HemorragiasDocument9 pagesHemorragiasARMANDO LADEUTH MORALESPas encore d'évaluation
- Cirugia de La Incontinencia Anal Del AdultoDocument16 pagesCirugia de La Incontinencia Anal Del AdultoDavid Salomon Gomez AscencioPas encore d'évaluation
- Crea gráficos de seguimiento Power BIDocument5 pagesCrea gráficos de seguimiento Power BIEvelyn ReadPas encore d'évaluation
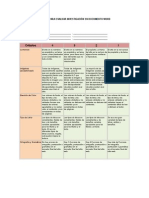
- Rubrica para Evaluar Investigacin en WordDocument1 pageRubrica para Evaluar Investigacin en Wordapi-257093331Pas encore d'évaluation
- DEMANDADocument9 pagesDEMANDAVanessa Hija de MarisolPas encore d'évaluation
- Elman BackpropagationDocument2 pagesElman BackpropagationgianPas encore d'évaluation
- Copia de Proyecto Formato Compatibilidad Estatal Chihuahua NivelesDocument2 pagesCopia de Proyecto Formato Compatibilidad Estatal Chihuahua NivelesGabriela ChaviraPas encore d'évaluation
- Pruebas de Bondad y AjusteDocument4 pagesPruebas de Bondad y AjusteFernando Solís LeónPas encore d'évaluation
- Duwprada - Taller 2Document1 pageDuwprada - Taller 2MARIA ALEJANDRA SAAVEDRAPas encore d'évaluation
- Informe de ExtintoresDocument2 pagesInforme de Extintoresandres roman100% (1)
- Hoja de SeguridadDocument4 pagesHoja de Seguridadwilmer carrionPas encore d'évaluation
- Tarea 1 Jorge JuarezDocument8 pagesTarea 1 Jorge Juarezjorge juarezPas encore d'évaluation
- Plan de ClasesDocument10 pagesPlan de ClasesSilvana FloresPas encore d'évaluation
- Manual de Uso SDZ Ii Nuevo PDFDocument16 pagesManual de Uso SDZ Ii Nuevo PDFmirandowebsPas encore d'évaluation
- Simulacion de Procesos Quimicos: Universidad Nacional Del Altiplano Facultad de Ingenieria QuimicaDocument19 pagesSimulacion de Procesos Quimicos: Universidad Nacional Del Altiplano Facultad de Ingenieria Quimicaelia melayde rosello ccasaPas encore d'évaluation
- Procedimiento excavaciones zanjasDocument23 pagesProcedimiento excavaciones zanjasJose Pizarro50% (2)
- Punta lógica TTLDocument2 pagesPunta lógica TTLCristian Daniel Gonzalez RodriguezPas encore d'évaluation
- Cultivo de PulpoDocument4 pagesCultivo de PulpoXosé Toxeiro MoloPas encore d'évaluation