Vous aimerez peut-être aussi
- Nonlinear Control Feedback Linearization Sliding Mode ControlD'EverandNonlinear Control Feedback Linearization Sliding Mode ControlPas encore d'évaluation
- Advanced Techniques and Technology of Computer-Aided Feedback ControlD'EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlPas encore d'évaluation
- Danial ReportDocument11 pagesDanial ReportImran AliPas encore d'évaluation
- AV 315 Control System: Raman Chawla SC12B042Document37 pagesAV 315 Control System: Raman Chawla SC12B042Raman ChawlaPas encore d'évaluation
- Mathematical Modelling& Various Control System Models & Responses Using MatlabDocument45 pagesMathematical Modelling& Various Control System Models & Responses Using MatlabJagabandhu KarPas encore d'évaluation
- TutorialsDocument14 pagesTutorialsAbdus SameePas encore d'évaluation
- Ta Proj 1 ReportlDocument12 pagesTa Proj 1 ReportlshaheerdurraniPas encore d'évaluation
- Clase Diseño Por Medio Del LGR Usando MatlabDocument42 pagesClase Diseño Por Medio Del LGR Usando MatlabJesus Tapia GallardoPas encore d'évaluation
- C&i Lab-2019Document67 pagesC&i Lab-2019aniruthPas encore d'évaluation
- Assignment 1: Answer.1 Syms T P (T) T 2+2 t+1Document24 pagesAssignment 1: Answer.1 Syms T P (T) T 2+2 t+1tommy merlynPas encore d'évaluation
- PID Controller Lab Exp5Document3 pagesPID Controller Lab Exp5Sanjoy Pathak100% (2)
- Experiment No 14 2018 BatchDocument14 pagesExperiment No 14 2018 BatchHafeez AliPas encore d'évaluation
- Project Based Learning IcsDocument14 pagesProject Based Learning IcsAvinash YadavPas encore d'évaluation
- EACT533 LCS Lab Work Report Garoma LAB Report-1Document43 pagesEACT533 LCS Lab Work Report Garoma LAB Report-1meseret sisayPas encore d'évaluation
- ACS PracticalFile IshaVerma PDFDocument23 pagesACS PracticalFile IshaVerma PDFDibyendu KarmakarPas encore d'évaluation
- Identification: 2.1 Identification of Transfer Functions 2.1.1 Review of Transfer FunctionDocument29 pagesIdentification: 2.1 Identification of Transfer Functions 2.1.1 Review of Transfer FunctionSucheful LyPas encore d'évaluation
- Names:-Ali Nawaz Ranjha: COMSATS-Lancaster Dual Degree ProgrammeDocument13 pagesNames:-Ali Nawaz Ranjha: COMSATS-Lancaster Dual Degree ProgrammeAli Nawaz RanjhaPas encore d'évaluation
- E N: CS I/833: Tille: S PI & PDDocument4 pagesE N: CS I/833: Tille: S PI & PD9700216256Pas encore d'évaluation
- Lab Report 4 PDFDocument15 pagesLab Report 4 PDF20pwmct0739Pas encore d'évaluation
- DC Motor Speed: Digital Controller Design: Eng Mohamed DobaDocument20 pagesDC Motor Speed: Digital Controller Design: Eng Mohamed DobaEng. Ibrahim Abdullah AlruhmiPas encore d'évaluation
- Mohsin PID Controller TutorialDocument12 pagesMohsin PID Controller TutorialMukaram Ali100% (1)
- Note - 11 - PD PI and PIDDocument9 pagesNote - 11 - PD PI and PIDDilip GPas encore d'évaluation
- ControllerDocument2 pagesControllerGiri KandePas encore d'évaluation
- Lab 9Document4 pagesLab 9Ali MohsinPas encore d'évaluation
- MATLAB and Its Control ToolboxDocument41 pagesMATLAB and Its Control ToolboxzkqasimPas encore d'évaluation
- Lab 06Document7 pagesLab 06Andy MeyerPas encore d'évaluation
- Activity 05Document17 pagesActivity 05Joshua AbadPas encore d'évaluation
- Experiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionDocument12 pagesExperiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionNimra NoorPas encore d'évaluation
- 3723 Lecture 18Document41 pages3723 Lecture 18Reddy BabuPas encore d'évaluation
- Mathematical Modeling of Control SystemsDocument11 pagesMathematical Modeling of Control Systemsayesha amjadPas encore d'évaluation
- Lab 4 ReportDocument16 pagesLab 4 Report20pwmct0739Pas encore d'évaluation
- Lab 3 - 4 ScilabDocument8 pagesLab 3 - 4 ScilabIq'wan RodzaiPas encore d'évaluation
- Control Theory 11Document50 pagesControl Theory 11faestningPas encore d'évaluation
- Assessment Report: ObjectiveDocument12 pagesAssessment Report: Objectivef158354 Muhammad HaseebPas encore d'évaluation
- L-12 (SS) (Ia&c) ( (Ee) Nptel) - P-I-D ControlDocument10 pagesL-12 (SS) (Ia&c) ( (Ee) Nptel) - P-I-D ControlRaymond EsmeraldaPas encore d'évaluation
- Experiment No. 5 Study of The Effect of A Forward-Path Lead Compensator On The Performance of A Linear Feedback Control SystemDocument3 pagesExperiment No. 5 Study of The Effect of A Forward-Path Lead Compensator On The Performance of A Linear Feedback Control SystemSubhaPas encore d'évaluation
- Introduction To Digital Systems 13 - Register-Transfer Level (RTL) SystemsDocument57 pagesIntroduction To Digital Systems 13 - Register-Transfer Level (RTL) SystemsenggshantPas encore d'évaluation
- Introduction: PID Controller DesignDocument23 pagesIntroduction: PID Controller DesignRahul DubeyPas encore d'évaluation
- First of All, Tune The Desired C Value So That TheDocument6 pagesFirst of All, Tune The Desired C Value So That TheKar Yeong LoPas encore d'évaluation
- Experiment 8 DC Motor Position Control SystemDocument15 pagesExperiment 8 DC Motor Position Control Systemprateek khotPas encore d'évaluation
- Introduction To PIDDocument16 pagesIntroduction To PIDjocianvefPas encore d'évaluation
- LAB 1: Introduction To MATLAB and SimulinkDocument14 pagesLAB 1: Introduction To MATLAB and Simulinkwanxin leiPas encore d'évaluation
- Lab Report CS 2Document9 pagesLab Report CS 2ubaidPas encore d'évaluation
- Unit-III - Root LocusDocument67 pagesUnit-III - Root LocusRachana GadePas encore d'évaluation
- Pid Control ExperimentDocument15 pagesPid Control Experimentazhar3303Pas encore d'évaluation
- Matlab CodeDocument13 pagesMatlab CodeSelva RajPas encore d'évaluation
- IntroductionDocument51 pagesIntroductionAlex NegulescuPas encore d'évaluation
- Plant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorDocument39 pagesPlant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorMani Kumar ReddyPas encore d'évaluation
- Objectives:: Lab ReportDocument6 pagesObjectives:: Lab Reportraheel buttPas encore d'évaluation
- Taller 01 - Control Digital 2018Document4 pagesTaller 01 - Control Digital 2018Frank DiazPas encore d'évaluation
- Module 4: Time Response of Discrete Time Systems: Lecture Note 1Document5 pagesModule 4: Time Response of Discrete Time Systems: Lecture Note 1nirmal_inbox100% (1)
- R7220402 Control SystemsDocument2 pagesR7220402 Control SystemssivabharathamurthyPas encore d'évaluation
- Introduction: PID Controller Design: SystemDocument14 pagesIntroduction: PID Controller Design: SystemRantharu AttanayakePas encore d'évaluation
- Lab 2Document13 pagesLab 2Raja Awais Shaukat Kiyani 977-FET/BSME/F20Pas encore d'évaluation
- Lab TasksDocument53 pagesLab TasksAhmed SaeedPas encore d'évaluation
- Robust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationD'EverandRobust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationPas encore d'évaluation
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsD'EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsPas encore d'évaluation
- Distributed Model Predictive Control for Plant-Wide SystemsD'EverandDistributed Model Predictive Control for Plant-Wide SystemsPas encore d'évaluation
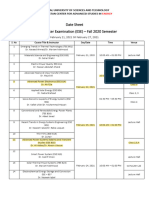
- USPCAS-E ESEs Fall 2020 Date Sheet FinalDocument2 pagesUSPCAS-E ESEs Fall 2020 Date Sheet FinalAbdul HaseebPas encore d'évaluation
- Smart Grid Communication Infrastructure: Dr. Muhammad TariqDocument49 pagesSmart Grid Communication Infrastructure: Dr. Muhammad TariqAbdul HaseebPas encore d'évaluation
- EE530 Smart GridDocument54 pagesEE530 Smart GridAbdul HaseebPas encore d'évaluation
- Lecture 09 Plug in Electric Vehicles and Smart Grid PDFDocument55 pagesLecture 09 Plug in Electric Vehicles and Smart Grid PDFAbdul HaseebPas encore d'évaluation
- Lecture 05 WSN For Smart Grids PDFDocument58 pagesLecture 05 WSN For Smart Grids PDFAbdul HaseebPas encore d'évaluation
- Distributed Energy Resource and Microgrids Integration: EE530 Smart GridDocument36 pagesDistributed Energy Resource and Microgrids Integration: EE530 Smart GridAbdul HaseebPas encore d'évaluation
- 12 Demand Response AnalysisDocument47 pages12 Demand Response AnalysisAbdul HaseebPas encore d'évaluation
- Bahria University Students Study Loans: Brief Guideline For Completion The ApplicationDocument4 pagesBahria University Students Study Loans: Brief Guideline For Completion The ApplicationSunee MentalPas encore d'évaluation
- Lecture Home and Building AutomationDocument47 pagesLecture Home and Building AutomationAbdul HaseebPas encore d'évaluation
- Lecture 10 Renewable Energy and Smart GridDocument43 pagesLecture 10 Renewable Energy and Smart GridAbdul HaseebPas encore d'évaluation
- Only For Result Awaited Candidates Please Make On Rs.5 or Above Stamp Paper and Attested Notary Public Affida V ITDocument1 pageOnly For Result Awaited Candidates Please Make On Rs.5 or Above Stamp Paper and Attested Notary Public Affida V ITAbdul HaseebPas encore d'évaluation
- Application Form For Admission in MSC Engineering: University of Engineering and Technology, TaxilaDocument2 pagesApplication Form For Admission in MSC Engineering: University of Engineering and Technology, TaxilaAbdul HaseebPas encore d'évaluation
- Lesson 15 - Cells and ModulesDocument32 pagesLesson 15 - Cells and ModulesAbdul HaseebPas encore d'évaluation
- Application Form For Admission in MSC Engineering: University of Engineering and Technology, TaxilaDocument2 pagesApplication Form For Admission in MSC Engineering: University of Engineering and Technology, TaxilaAbdul HaseebPas encore d'évaluation
- Thank You For This Opportunity To Speak About The LeadershipDocument2 pagesThank You For This Opportunity To Speak About The LeadershipAbdul HaseebPas encore d'évaluation
- TransformersDocument24 pagesTransformersWonbae ChoiPas encore d'évaluation
- EE Time Table Ramadan VersionDocument7 pagesEE Time Table Ramadan VersionAbdul HaseebPas encore d'évaluation
- Labs PDFDocument2 pagesLabs PDFAbdul HaseebPas encore d'évaluation
- Academic Plan Spring-2020-Ver-1 PDFDocument1 pageAcademic Plan Spring-2020-Ver-1 PDFAli YasirPas encore d'évaluation
- Labs PDFDocument2 pagesLabs PDFAbdul HaseebPas encore d'évaluation
- Lecture 10 Renewable Energy and Smart GridDocument43 pagesLecture 10 Renewable Energy and Smart GridAbdul HaseebPas encore d'évaluation
- Measure of Central Tendency PDFDocument47 pagesMeasure of Central Tendency PDFAbdul HaseebPas encore d'évaluation
- EE TIMETable Spring-2019 V4Document1 pageEE TIMETable Spring-2019 V4Abdul HaseebPas encore d'évaluation
- Electromechanical System Lab Manual 2Document8 pagesElectromechanical System Lab Manual 2Abdul HaseebPas encore d'évaluation
- General Safety Measures of Electromechanical System LabDocument7 pagesGeneral Safety Measures of Electromechanical System LabAbdul HaseebPas encore d'évaluation
- Schedule of Graduate Assessment Test (GAT™ General) 2019Document1 pageSchedule of Graduate Assessment Test (GAT™ General) 2019Abdul HaseebPas encore d'évaluation
- Lecture 01-02Document1 pageLecture 01-02Abdul HaseebPas encore d'évaluation
- Earthquake DetectorDocument3 pagesEarthquake DetectorAbdul HaseebPas encore d'évaluation
- Miller IndicesDocument12 pagesMiller IndicesKaushal GandhiPas encore d'évaluation
- Solution of Linear Systems of Equations in Matlab, Freemat, Octave and Scilab by WWW - Freemat.infoDocument4 pagesSolution of Linear Systems of Equations in Matlab, Freemat, Octave and Scilab by WWW - Freemat.inforodwellheadPas encore d'évaluation
- Listening - Cot4thDocument6 pagesListening - Cot4thmichel.atilanoPas encore d'évaluation
- PROII Data Transfer System User GuideDocument91 pagesPROII Data Transfer System User Guidemfruge7Pas encore d'évaluation
- Religious Affiliation, Internalized Homophobia, and Mental Health in Lesbians, Gay Men, and BisexualsDocument11 pagesReligious Affiliation, Internalized Homophobia, and Mental Health in Lesbians, Gay Men, and BisexualsRandy HowePas encore d'évaluation
- WSDL Versioning Best PracticesDocument6 pagesWSDL Versioning Best Practiceshithamg6152Pas encore d'évaluation
- Finding The Process Edge: ITIL at Celanese: Ulrike SchultzeDocument18 pagesFinding The Process Edge: ITIL at Celanese: Ulrike SchultzeCristiane Drebes PedronPas encore d'évaluation
- Articles of Confederation LessonDocument2 pagesArticles of Confederation Lessonapi-233755289Pas encore d'évaluation
- Case Study Sustainable ConstructionDocument5 pagesCase Study Sustainable ConstructionpraisethenordPas encore d'évaluation
- Hibernate-Generic-Dao: GenericdaoexamplesDocument1 pageHibernate-Generic-Dao: GenericdaoexamplesorangotaPas encore d'évaluation
- Researchpaper Parabolic Channel DesignDocument6 pagesResearchpaper Parabolic Channel DesignAnonymous EIjnKecu0JPas encore d'évaluation
- Change Sequence's Current Value (CURRVAL) Without Dropping It OraExplorerDocument6 pagesChange Sequence's Current Value (CURRVAL) Without Dropping It OraExplorerIan HughesPas encore d'évaluation
- Graph Theory (B)Document2 pagesGraph Theory (B)Waqar RoyPas encore d'évaluation
- Approaches On Gender Equality in Development Cooperation A Comparison Between The International, National and Project LevelsDocument69 pagesApproaches On Gender Equality in Development Cooperation A Comparison Between The International, National and Project LevelsMzee KodiaPas encore d'évaluation
- Matter Week 6Document4 pagesMatter Week 6api-316479601Pas encore d'évaluation
- Color OverlaysDocument2 pagesColor Overlaysapi-366876366Pas encore d'évaluation
- 7.IITD 2012 Theory of VibrationDocument9 pages7.IITD 2012 Theory of Vibrationlaith adnanPas encore d'évaluation
- Transport Modelling Guidelines Volume 5 Intersection Modelling June 2020Document198 pagesTransport Modelling Guidelines Volume 5 Intersection Modelling June 2020Amul ShresthaPas encore d'évaluation
- Gender Differences in Self-ConceptDocument13 pagesGender Differences in Self-Conceptmaasai_maraPas encore d'évaluation
- Subliminal Perception and Extrasensory PerceptionDocument19 pagesSubliminal Perception and Extrasensory PerceptionAnne Jenette CastilloPas encore d'évaluation
- Xaviers Institute of Social Service: Assignment On Quantitative TechniquesDocument20 pagesXaviers Institute of Social Service: Assignment On Quantitative Techniquesravi kumarPas encore d'évaluation
- Representation Reading OtherwiseDocument8 pagesRepresentation Reading OtherwiseFabio RamalhoPas encore d'évaluation
- Third Periodical Assessment Test (Pat 3) Grade 8 - MathematicsDocument10 pagesThird Periodical Assessment Test (Pat 3) Grade 8 - Mathematicswerdubob100% (1)
- Professional Scrum Master I Simulator Test 1 PDFDocument8 pagesProfessional Scrum Master I Simulator Test 1 PDFRahul GandhiPas encore d'évaluation
- Module 2Document4 pagesModule 2Amethyst LeePas encore d'évaluation
- ReportDocument39 pagesReportabi patowaryPas encore d'évaluation
- NOLS 2014 Fall Catalog PDFDocument60 pagesNOLS 2014 Fall Catalog PDFcoldflame81Pas encore d'évaluation
- NationalMootCourtCompetition Moot ProblemDocument5 pagesNationalMootCourtCompetition Moot ProblemKarsin ManochaPas encore d'évaluation
- Trading Psychology - A Non-Cynical Primer - by CryptoCred - MediumDocument1 pageTrading Psychology - A Non-Cynical Primer - by CryptoCred - MediumSlavko GligorijevićPas encore d'évaluation
- Better Typing and Dictating PracticesDocument7 pagesBetter Typing and Dictating PracticesDiyansh JainPas encore d'évaluation