Vous aimerez peut-être aussi
- VC AndrewsDocument3 pagesVC AndrewsLesa O'Leary100% (1)
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYD'EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYPas encore d'évaluation
- Micro - Systemic Bacteriology Questions PDFDocument79 pagesMicro - Systemic Bacteriology Questions PDFShashipriya AgressPas encore d'évaluation
- Ransomware: Prevention and Response ChecklistDocument5 pagesRansomware: Prevention and Response Checklistcapodelcapo100% (1)
- Cosmic Handbook PreviewDocument9 pagesCosmic Handbook PreviewnkjkjkjPas encore d'évaluation
- Thesis On Retail Management of The Brand 'Sleepwell'Document62 pagesThesis On Retail Management of The Brand 'Sleepwell'Sajid Lodha100% (1)
- Laudon - Mis16 - PPT - ch11 - KL - CE (Updated Content For 2021) - Managing Knowledge and Artificial IntelligenceDocument45 pagesLaudon - Mis16 - PPT - ch11 - KL - CE (Updated Content For 2021) - Managing Knowledge and Artificial IntelligenceSandaru RathnayakePas encore d'évaluation
- 742225Document2 pages742225Vũ Vũ100% (1)
- BodeDocument1 pageBodeAlexis Diaz SalasPas encore d'évaluation
- Ilovepdf MergedDocument2 pagesIlovepdf Mergedlololo2354Pas encore d'évaluation
- Bode Diagram: Frequency (Rad/s)Document2 pagesBode Diagram: Frequency (Rad/s)lololo2354Pas encore d'évaluation
- Ilovepdf MergedDocument2 pagesIlovepdf Mergedlololo2354Pas encore d'évaluation
- Introduction To Scilab and Black-Nichols ChartsDocument7 pagesIntroduction To Scilab and Black-Nichols ChartsIndra WahyudinPas encore d'évaluation
- (10port Antenna MB4BMFMF3F-65&PSA4-15181819DE-RET InsideDocument3 pages(10port Antenna MB4BMFMF3F-65&PSA4-15181819DE-RET Insideselvam kksPas encore d'évaluation
- High Power Communications Transducer: Teledyne RESON PLD16830-1BDocument3 pagesHigh Power Communications Transducer: Teledyne RESON PLD16830-1BAntony Jacob AshishPas encore d'évaluation
- Chapter 11 Part IDocument39 pagesChapter 11 Part Imstan11Pas encore d'évaluation
- Rancom - 7906F2C5280EAx (RW-4-L1L1H1H1-65-13131616-ET-IN-43R) PDFDocument4 pagesRancom - 7906F2C5280EAx (RW-4-L1L1H1H1-65-13131616-ET-IN-43R) PDFTriple TGPas encore d'évaluation
- Nyquist PlotDocument2 pagesNyquist Plotakhil KumarPas encore d'évaluation
- 16JXXADS B Plot Gain 5f6cDocument1 page16JXXADS B Plot Gain 5f6c20dgleePas encore d'évaluation
- Probleme Control OptimalDocument2 pagesProbleme Control OptimalCostica PoienaruPas encore d'évaluation
- Nichols ChartDocument9 pagesNichols ChartJin Sung AhnPas encore d'évaluation
- ECOQB684Document2 pagesECOQB684ValonPas encore d'évaluation
- Anexa - Diagrame BODE Tipice: 0 T 1 TS) S (G Pol T 1 0 T 1 Ts 1) S (GDocument2 pagesAnexa - Diagrame BODE Tipice: 0 T 1 TS) S (G Pol T 1 0 T 1 Ts 1) S (GDenisa OlaruPas encore d'évaluation
- Module 4 - Bode PlotsDocument63 pagesModule 4 - Bode PlotsPoovaiahkkNishanPas encore d'évaluation
- Yagi Multi-Band Antenna Dual Polarization Half-Power Beam Width Integrated CombinerDocument2 pagesYagi Multi-Band Antenna Dual Polarization Half-Power Beam Width Integrated CombinerMOHAMED SALIM THAMEURPas encore d'évaluation
- Control Systems 2: Lecture 6 - Quantitative Feedback Theory (QFT) Disturbance RejectionDocument16 pagesControl Systems 2: Lecture 6 - Quantitative Feedback Theory (QFT) Disturbance RejectionLEBOPas encore d'évaluation
- Control Systems 2: Lecture 6 - Quantitative Feedback Theory (QFT) Disturbance RejectionDocument16 pagesControl Systems 2: Lecture 6 - Quantitative Feedback Theory (QFT) Disturbance RejectionLEBOPas encore d'évaluation
- Control Systems 2: Lecture 6 - Quantitative Feedback Theory (QFT) Disturbance RejectionDocument16 pagesControl Systems 2: Lecture 6 - Quantitative Feedback Theory (QFT) Disturbance RejectionLEBOPas encore d'évaluation
- DB220&DB222Document1 pageDB220&DB222Scott WPas encore d'évaluation
- 742226v01 - Dual 33° - 60cmDocument2 pages742226v01 - Dual 33° - 60cmflacoc100% (1)
- Triple-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument2 pagesTriple-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltAntonio DrednoudPas encore d'évaluation
- Kath 742235Document2 pagesKath 742235lucafrugantiPas encore d'évaluation
- Quad-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument1 pageQuad-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDmiPas encore d'évaluation
- Dual-Band A-Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument4 pagesDual-Band A-Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltahmadPas encore d'évaluation
- 2-Multi-Band F-Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument4 pages2-Multi-Band F-Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltAnonymous OM5uU6Pas encore d'évaluation
- Dual-Band A-Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument4 pagesDual-Band A-Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltwmligaPas encore d'évaluation
- Антенна Mobi Mb3bh - mfmfmfmf 65 1618181818deDocument3 pagesАнтенна Mobi Mb3bh - mfmfmfmf 65 1618181818desfynksPas encore d'évaluation
- BDA3073 - 11 Bode PlotDocument26 pagesBDA3073 - 11 Bode PlotAhmad FaidhiPas encore d'évaluation
- DSP Lab 9Document2 pagesDSP Lab 9SaRosh RaeesPas encore d'évaluation
- 800 10684 PDFDocument1 page800 10684 PDFМаксPas encore d'évaluation
- Vdocuments - MX 742 266Document4 pagesVdocuments - MX 742 266Adnan adnanPas encore d'évaluation
- 2-Multi-Band F-Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument4 pages2-Multi-Band F-Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltwmligaPas encore d'évaluation
- Datasheet 80010826Document8 pagesDatasheet 80010826slavunPas encore d'évaluation
- Dual-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument4 pagesDual-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltJulian Andres VictoriaPas encore d'évaluation
- K 742266Document4 pagesK 742266Rasim LevashovPas encore d'évaluation
- MB3BH MF 65 17 18deDocument1 pageMB3BH MF 65 17 18deJura GirskiPas encore d'évaluation
- Dual-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument2 pagesDual-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltlucafrugantiPas encore d'évaluation
- 742266Document4 pages742266ehab1976Pas encore d'évaluation
- Dual-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument4 pagesDual-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltMert A.Pas encore d'évaluation
- Antena Dualband - 742264V02 - Kathrein PDFDocument2 pagesAntena Dualband - 742264V02 - Kathrein PDFLll LllPas encore d'évaluation
- Triple-Band Panel Frequency Range Dual Polarization HPBW Adjust. Electr. DTDocument4 pagesTriple-Band Panel Frequency Range Dual Polarization HPBW Adjust. Electr. DTDoc All TelecomPas encore d'évaluation
- Antenna SpecificationsDocument3 pagesAntenna SpecificationsNatalya DrugakovaPas encore d'évaluation
- World Audio Level Reference PDFDocument1 pageWorld Audio Level Reference PDFHector Herrera ChavezPas encore d'évaluation
- Kat - 2X - Noret - 742265 (Kre1011930)Document2 pagesKat - 2X - Noret - 742265 (Kre1011930)zeeshanriaz1077Pas encore d'évaluation
- Final AnswerDocument4 pagesFinal AnswerHaziqPas encore d'évaluation
- TA-823-4-65 Sector: Electrical Specifications Mechanical SpecificationsDocument1 pageTA-823-4-65 Sector: Electrical Specifications Mechanical SpecificationsSaad rehmanPas encore d'évaluation
- Reguli BodeDocument1 pageReguli BodeDana PascanPas encore d'évaluation
- Kathrein 800442001Document5 pagesKathrein 800442001MiniotPas encore d'évaluation
- PDFDocument1 pagePDFDmitriiSpiridonovPas encore d'évaluation
- Omni MaiorDocument3 pagesOmni MaiorFernando CarvalhoPas encore d'évaluation
- Multi-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electrical DowntiltDocument3 pagesMulti-Band Panel Dual Polarization Half-Power Beam Width Adjust. Electrical DowntiltEmmersonLisboaPas encore d'évaluation
- Base Station Antenna: HXPM8X3WWW1717065T2CT28Document1 pageBase Station Antenna: HXPM8X3WWW1717065T2CT28Андрей СвининPas encore d'évaluation
- The Giant: Numbers 0–20 Activity Book, Ages 4 - 5D'EverandThe Giant: Numbers 0–20 Activity Book, Ages 4 - 5Pas encore d'évaluation
- Neural Ordinary Differential Equations: Ricky T. Q. Chen, Yulia Rubanova, Jesse Bettencourt, David DuvenaudDocument42 pagesNeural Ordinary Differential Equations: Ricky T. Q. Chen, Yulia Rubanova, Jesse Bettencourt, David DuvenaudGabriel LPas encore d'évaluation
- Scalable Quantum Simulation of Molecular Energies: Doi: Subject Areas: Condensed Matter Physics, Quantum InformationDocument13 pagesScalable Quantum Simulation of Molecular Energies: Doi: Subject Areas: Condensed Matter Physics, Quantum InformationGabriel LPas encore d'évaluation
- Chapter 9 Quantitative Feedback TheoryDocument44 pagesChapter 9 Quantitative Feedback TheoryGabriel LPas encore d'évaluation
- Control System Design - QFT: Bo Bernhardsson, K. J. ÅströmDocument54 pagesControl System Design - QFT: Bo Bernhardsson, K. J. ÅströmGabriel LPas encore d'évaluation
- 2019 AIChE Spring MTG Compressor Surge Modeling and ControlDocument7 pages2019 AIChE Spring MTG Compressor Surge Modeling and ControlGabriel LPas encore d'évaluation
- IbmautomtiveDocument38 pagesIbmautomtiveMeltz NjorogePas encore d'évaluation
- Sodexo GermanyDocument13 pagesSodexo GermanySandeep Kumar AgrawalPas encore d'évaluation
- Instruction Manual 115cx ENGLISHDocument72 pagesInstruction Manual 115cx ENGLISHRomanPiscraftMosqueteerPas encore d'évaluation
- Simon Fraser University: Consent and Release FormDocument1 pageSimon Fraser University: Consent and Release FormpublicsqPas encore d'évaluation
- Induction Motor Steady-State Model (Squirrel Cage) : MEP 1422 Electric DrivesDocument21 pagesInduction Motor Steady-State Model (Squirrel Cage) : MEP 1422 Electric DrivesSpoiala DragosPas encore d'évaluation
- C++ Program To Create A Student Database - My Computer ScienceDocument10 pagesC++ Program To Create A Student Database - My Computer ScienceSareeya ShrePas encore d'évaluation
- Needle BasicsDocument31 pagesNeedle BasicsARYAN RATHOREPas encore d'évaluation
- Arithmetic-Progressions - MDDocument8 pagesArithmetic-Progressions - MDJay Jay GwizaPas encore d'évaluation
- Module 2 TechnologyDocument20 pagesModule 2 Technologybenitez1Pas encore d'évaluation
- Zigbee Technology:19-3-2010: Seminor Title DateDocument21 pagesZigbee Technology:19-3-2010: Seminor Title Dateitdep_gpcet7225Pas encore d'évaluation
- Guidelines For Plenipotentiary - 1Document6 pagesGuidelines For Plenipotentiary - 1Oladimeji Ibukun IjaodolaPas encore d'évaluation
- Watch One Piece English SubDub Online Free On Zoro - ToDocument1 pageWatch One Piece English SubDub Online Free On Zoro - ToSadeusuPas encore d'évaluation
- Empanelled Hospitals List Updated - 06-12-2022 - 1670482933145Document19 pagesEmpanelled Hospitals List Updated - 06-12-2022 - 1670482933145mechmaster4uPas encore d'évaluation
- List of Olympic MascotsDocument10 pagesList of Olympic MascotsmukmukkumPas encore d'évaluation
- Lotus Exige Technical InformationDocument2 pagesLotus Exige Technical InformationDave LeyPas encore d'évaluation
- Agm 1602W-818Document23 pagesAgm 1602W-818Daniel BauerPas encore d'évaluation
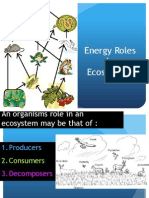
- Energy-Roles-In-Ecosystems-Notes-7 12bDocument10 pagesEnergy-Roles-In-Ecosystems-Notes-7 12bapi-218158367Pas encore d'évaluation
- Physico-Chemical Properties of Nutmeg (Myristica Fragrans Houtt) of North Sulawesi NutmegDocument9 pagesPhysico-Chemical Properties of Nutmeg (Myristica Fragrans Houtt) of North Sulawesi NutmegZyuha AiniiPas encore d'évaluation
- Friday 25 Mar 12:15 AM Friday 25 Mar 5:30 AM: Emirates CGK DXBDocument3 pagesFriday 25 Mar 12:15 AM Friday 25 Mar 5:30 AM: Emirates CGK DXBDONI ARTAPas encore d'évaluation
- EmployWise JAVA ASSIGNMENTDocument2 pagesEmployWise JAVA ASSIGNMENTPreet PatelPas encore d'évaluation
- ProbDocument10 pagesProbKashif JawaidPas encore d'évaluation
- 2 - Sample Kids Can Read and Write 2 and 3 Letter Words - Step 2 Final Downloadable Version For Website PDFDocument18 pages2 - Sample Kids Can Read and Write 2 and 3 Letter Words - Step 2 Final Downloadable Version For Website PDFsantoshiPas encore d'évaluation
- Reproduction in PlantsDocument12 pagesReproduction in PlantsAnand Philip PrasadPas encore d'évaluation
- Malling DemallingDocument25 pagesMalling DemallingVijay KumarPas encore d'évaluation