Vous aimerez peut-être aussi
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorD'EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorPas encore d'évaluation
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasD'EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasÉvaluation : 5 sur 5 étoiles5/5 (1)
- Informe #2 Labo Control Discreto. IeeeDocument3 pagesInforme #2 Labo Control Discreto. IeeeStalin MiguelPas encore d'évaluation
- Péndulo InvertidoDocument23 pagesPéndulo InvertidoSuco GuerreroPas encore d'évaluation
- Minimum Time Swing-Up Controller Applied To A Rotary Inverted Pendulum PDFDocument6 pagesMinimum Time Swing-Up Controller Applied To A Rotary Inverted Pendulum PDFSerrano García Uriel IvánPas encore d'évaluation
- Reporte Péndulo FurutaDocument9 pagesReporte Péndulo FurutaEve MegPas encore d'évaluation
- Informe Pendulo InvertidoDocument20 pagesInforme Pendulo InvertidoÁngelFabrizzioLuciánVillavicencioRoquePas encore d'évaluation
- Análisis Cinemático Utilizando Matlab para La Máquina de Watt de Movimiento ParaleloDocument9 pagesAnálisis Cinemático Utilizando Matlab para La Máquina de Watt de Movimiento ParaleloJordy SantanaPas encore d'évaluation
- Informe Pendulo InvertidoDocument22 pagesInforme Pendulo InvertidoJuanCarlosJoveJinézPas encore d'évaluation
- Vibraciones A Travez de Un Potenciometro-PenduloDocument10 pagesVibraciones A Travez de Un Potenciometro-PenduloCarlos Pérez HernándezPas encore d'évaluation
- ActividadMecanismos U3Document29 pagesActividadMecanismos U3Pepe SanchezPas encore d'évaluation
- MatlabDocument4 pagesMatlabBenavides DanielPas encore d'évaluation
- Torque GiroscópicoDocument13 pagesTorque GiroscópicoRodrigo VelásteguiPas encore d'évaluation
- IEEEDocument4 pagesIEEEJuano MosqueraPas encore d'évaluation
- Anteproyecto Bi HeliceDocument4 pagesAnteproyecto Bi HeliceEDWIN FABIAN NINO TORRESPas encore d'évaluation
- Mecanismo Biela Manivela 1Document16 pagesMecanismo Biela Manivela 1Luis HernándezPas encore d'évaluation
- Tarea 2Document11 pagesTarea 2CARLOS ADRIAN PALACIOS ROSADOPas encore d'évaluation
- Reporte Del Pendulo Invertido - Erik Zamora GomezDocument9 pagesReporte Del Pendulo Invertido - Erik Zamora GomezFausto Moon EspartaPas encore d'évaluation
- Lab.02 Triangulo de Velocidadess PDFDocument15 pagesLab.02 Triangulo de Velocidadess PDFGerman RazuriPas encore d'évaluation
- Pro Yec To FinalDocument8 pagesPro Yec To FinalMiguelAngelPas encore d'évaluation
- Balancín Motor HéliceDocument15 pagesBalancín Motor Hélicemanuel cruzPas encore d'évaluation
- Implementación y Control de Un Mecanismo de PDFDocument6 pagesImplementación y Control de Un Mecanismo de PDFISmael MEdina LOpezPas encore d'évaluation
- Antecedentes Del Péndulo InvertidoDocument7 pagesAntecedentes Del Péndulo InvertidoErnesto_O_ate_6469Pas encore d'évaluation
- Practica 3 NUEVODocument28 pagesPractica 3 NUEVOCarlos SilvaPas encore d'évaluation
- Diaz Iñiguez Miguel Practica7Document5 pagesDiaz Iñiguez Miguel Practica7MIGUEL ANGEL DIAZ INIGUEZPas encore d'évaluation
- Pendulo 2 CorteDocument8 pagesPendulo 2 CorteGerman David Medina MartinezPas encore d'évaluation
- Lab 07 PotenciaDocument2 pagesLab 07 PotenciaCamila DazaPas encore d'évaluation
- Servo MotoresDocument4 pagesServo MotoresJonathan QuirozPas encore d'évaluation
- Practica 3 Motor Pasos PLCDocument6 pagesPractica 3 Motor Pasos PLCPoliester Tejas CuadrosPas encore d'évaluation
- Proyecto Final - Equipo 2Document15 pagesProyecto Final - Equipo 2José Arturo Larralde ChilpaPas encore d'évaluation
- Simulation of Standing Upright Control of An Inverted Pendulum Using Inertia Rotor and The Swing Type Inverted Pendulum For Engineering EducationDocument12 pagesSimulation of Standing Upright Control of An Inverted Pendulum Using Inertia Rotor and The Swing Type Inverted Pendulum For Engineering EducationEvelin QuishpePas encore d'évaluation
- Evidencia Del ServicioDocument11 pagesEvidencia Del ServicioVictor KbñsPas encore d'évaluation
- Informe de Laboratorio Fuerza CentrifugaDocument13 pagesInforme de Laboratorio Fuerza CentrifugaAlex Laftar FlowPas encore d'évaluation
- Analisis MecanismosDocument2 pagesAnalisis MecanismosGerson CashtroPas encore d'évaluation
- HidroneumaticaDocument19 pagesHidroneumaticarodrigocontrerasbPas encore d'évaluation
- No.5 Relacion Line y Angu 1311BDocument6 pagesNo.5 Relacion Line y Angu 1311BIrving Ponce HernandezPas encore d'évaluation
- Proyecto Final U3 - Grupo3Document11 pagesProyecto Final U3 - Grupo3Fer Nando IsaacPas encore d'évaluation
- Tarea 4 Pendulo InvertidoDocument16 pagesTarea 4 Pendulo InvertidoOscar Ronal Espinoza JapaPas encore d'évaluation
- EXAMEN 1er PARCIAL MECATRONICA Gestion II-2020Document12 pagesEXAMEN 1er PARCIAL MECATRONICA Gestion II-2020KEVIN LIONEL POMA RIVEROSPas encore d'évaluation
- 475 889 1 SMDocument11 pages475 889 1 SMVíctor ArrietaPas encore d'évaluation
- Informe Compuertas LogicasDocument9 pagesInforme Compuertas LogicasarnoldtoniPas encore d'évaluation
- RedalycDocument8 pagesRedalycRoberto Sanchez PerezPas encore d'évaluation
- PROYECTO FINAL SegwayDocument18 pagesPROYECTO FINAL SegwayJose Gabriel SaavedraPas encore d'évaluation
- Motor de Ascencion Recta DiseñoDocument17 pagesMotor de Ascencion Recta DiseñoJuanManuelOsunaPas encore d'évaluation
- Complemetarias 1Document4 pagesComplemetarias 1Jhon GuerreroPas encore d'évaluation
- Desarrollo y Control de Un Pendulo de FurutaDocument7 pagesDesarrollo y Control de Un Pendulo de FurutaHugo Junior Quispe ChaconPas encore d'évaluation
- Control de Motor de PasoDocument4 pagesControl de Motor de PasoKevin PechoPas encore d'évaluation
- Robot BalancínDocument10 pagesRobot BalancínPedro HenriquezPas encore d'évaluation
- Proyecto BRAZO ROBOTICODocument9 pagesProyecto BRAZO ROBOTICOandres felipe sandoval porrasPas encore d'évaluation
- Laboratorio 6 CalveteDocument3 pagesLaboratorio 6 CalveteByronJCalvetePas encore d'évaluation
- PI y PID de Un Brazo Tipo SCARA y Pendulo Invertido 17570015Document24 pagesPI y PID de Un Brazo Tipo SCARA y Pendulo Invertido 17570015David Ferrusca MartinezPas encore d'évaluation
- Adrián-Sara-Waira Informe RevisadoDocument25 pagesAdrián-Sara-Waira Informe Revisadojuiiaan diazPas encore d'évaluation
- Apuntes MecanicaDocument4 pagesApuntes MecanicaGilberto ZamudioPas encore d'évaluation
- Laboratorio 5Document5 pagesLaboratorio 5Jose ChoquePas encore d'évaluation
- Dobles DeflexionesDocument6 pagesDobles DeflexionesSabrinita Torres0% (1)
- Paper Proyecto Control ModernoDocument7 pagesPaper Proyecto Control ModernoFernando MendezPas encore d'évaluation
- Reporte Practica de Motor A PasosDocument13 pagesReporte Practica de Motor A PasosAlvarez Tomas0% (1)
- Ejercicios de Integrales de Línea, Superficie y VolumenD'EverandEjercicios de Integrales de Línea, Superficie y VolumenÉvaluation : 4 sur 5 étoiles4/5 (2)
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoD'EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoPas encore d'évaluation
- Laboratorio de Estadística Inferencial IIDocument1 pageLaboratorio de Estadística Inferencial IIMonty SilvaPas encore d'évaluation
- Eaiii Primer Trimestre (Sec7)Document16 pagesEaiii Primer Trimestre (Sec7)Monty SilvaPas encore d'évaluation
- Examen de Segundo Energías AlternativasDocument4 pagesExamen de Segundo Energías AlternativasMonty SilvaPas encore d'évaluation
- Eai Primer Trimestre (Sec7)Document16 pagesEai Primer Trimestre (Sec7)Monty Silva100% (1)
- Examen Modulo 3Document1 pageExamen Modulo 3Monty SilvaPas encore d'évaluation
- Trabajo de AnovaDocument5 pagesTrabajo de AnovaMonty SilvaPas encore d'évaluation
- Análisis de Diseño de Bloques DanielDocument2 pagesAnálisis de Diseño de Bloques DanielMonty SilvaPas encore d'évaluation
- Trabajo Práctico de Geometria AnaliticaDocument2 pagesTrabajo Práctico de Geometria AnaliticaRichard Douglas100% (1)
- Teoria de Juegos Ejercicios Resueltos Final PDFDocument28 pagesTeoria de Juegos Ejercicios Resueltos Final PDFEnrique Forner Diaz100% (1)
- Economia 2019Document65 pagesEconomia 2019Max Junior Quispe Chambilla100% (1)
- Actividad 2 CinemáticaDocument8 pagesActividad 2 CinemáticaJairo Quintana GonzalezPas encore d'évaluation
- s5 Derivada de Una Función Real Mat1 Arq 2019 1Document2 pagess5 Derivada de Una Función Real Mat1 Arq 2019 1Fiorella LópezPas encore d'évaluation
- QC Herramientas de IshikawaDocument34 pagesQC Herramientas de Ishikawadavidicito1994Pas encore d'évaluation
- TEMA 8. Prueba de HipótesisDocument53 pagesTEMA 8. Prueba de HipótesisBrayan GamboaPas encore d'évaluation
- Red CristalinaDocument13 pagesRed CristalinaAlba Limon ManzanoPas encore d'évaluation
- 33 48 Metodo NumDocument6 pages33 48 Metodo NumRodrigoBustosCruzPas encore d'évaluation
- Guia 11Document3 pagesGuia 11Fabiola Yessica CondoriPas encore d'évaluation
- Vacacional - 1Document4 pagesVacacional - 1Levi JonesPas encore d'évaluation
- Guías de Matemáticas Tercer Periodo. 2020 (Recuperado Automáticamente)Document19 pagesGuías de Matemáticas Tercer Periodo. 2020 (Recuperado Automáticamente)Liliana LindoPas encore d'évaluation
- Ecuación de Primer GradoDocument19 pagesEcuación de Primer GradoMauricio LopezPas encore d'évaluation
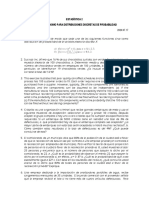
- Autónomo 1.3. Distribuciones Discretas 20200717 PDFDocument3 pagesAutónomo 1.3. Distribuciones Discretas 20200717 PDFsantiago vacaPas encore d'évaluation
- Proyecto1 Equipo2 PDFDocument14 pagesProyecto1 Equipo2 PDFSalmaDanielaAguirre100% (1)
- SembradoraDocument18 pagesSembradoraGabriel LopezPas encore d'évaluation
- Matematica Iv: Docente: Paul Alvarado EsquivelDocument15 pagesMatematica Iv: Docente: Paul Alvarado EsquivelRenzo ChorresPas encore d'évaluation
- Tarea N°1 FEM M3 Peralta, Ojeda, Duarte, Rodriguez.Document13 pagesTarea N°1 FEM M3 Peralta, Ojeda, Duarte, Rodriguez.roymar peraltPas encore d'évaluation
- Probabilidad y Estadística: Ingeniería IndustrialDocument14 pagesProbabilidad y Estadística: Ingeniería IndustrialHumberto EspinozaPas encore d'évaluation
- Unidad 2 Matematicas FinancierasDocument5 pagesUnidad 2 Matematicas FinancierasAdriana DiazPas encore d'évaluation
- Ensayo Escrito de La Unidad 4 Mi ParteDocument4 pagesEnsayo Escrito de La Unidad 4 Mi Parteanon_302218222100% (1)
- Mas ConicasDocument6 pagesMas ConicasLeonardo DiazPas encore d'évaluation
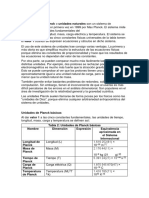
- Sistema Natural y Sitemas de Unidades de Medida TradicionalesDocument5 pagesSistema Natural y Sitemas de Unidades de Medida TradicionalesArnold Llancay50% (2)
- 17 Prueba de Hipótesis - Media y ProporciónDocument15 pages17 Prueba de Hipótesis - Media y ProporciónXina Obeso AltamiranoPas encore d'évaluation
- Matematica BasicaDocument2 pagesMatematica Basicafoker01Pas encore d'évaluation
- Examen UdeA Anterior 4Document10 pagesExamen UdeA Anterior 4Giovany ElieserPas encore d'évaluation
- Capitulo III (Marco Metodologico)Document10 pagesCapitulo III (Marco Metodologico)francisco lopezPas encore d'évaluation
- Repaso Unidad 3 (Sexto Año)Document3 pagesRepaso Unidad 3 (Sexto Año)Karin Aguayo MelgarejoPas encore d'évaluation